智能窗帘机器人-涂鸦版
更新时间:2021-05-08 11:44:53

概况
功能:
- 红外遥控控制
- 手拉启动
- 遇阻停止
- 首次启动自动设置限位点
- 电量检测
- 涂鸦智能控制
硬件配置
- mcu stm32l010f4p6
- wifi 涂鸦wbr3
- 红外接收 LF0038M
- 霍尔 ss460s 或 hs229 双极锁存低功耗霍尔传感器
- 电机驱动 DRV8837C
工作原理
涂鸦模组或红外接收 控制信号,mcu处理后控制电机转动。霍尔传感器检测位置及方向,实现行程限位,及手拉启动。mcu与涂鸦模块通过串口通讯,mcu使用低功耗模式,待机自动进入stop模式,可以由红外接收、涂鸦模块串口、霍尔模块等唤醒执行动作。配置adc检测电池电量。
安装使用
主机安装置于窗帘开启状态位置,开启电源,遥控或涂鸦app连接控制窗帘关闭,窗帘运行至关闭状态遇阻停止,程序自动设置关闭限位点,完成行程设置。后续就可以正常使用了。
红外遥控可实现,开启,关闭,停止 3种状态控制功能
涂鸦app实现
开启,关闭,停止,继续 4种状态控制功能
开启关闭百分比显示及控制功能。
电量显示,手拉启动开关功能,定时功能,及与其他涂鸦设备联动。
问题
1.垃圾轨道有些地方太窄,动力不足有些过不去,应该改7.4V供电。
2.原本设计是离线版,mcu待机模式休眠,配合活动加了涂鸦模块,实时联网可能造成续航能力不足。
3.用的减速电机手动拉窗帘可能会有些难拉。
4.还有很多问题。

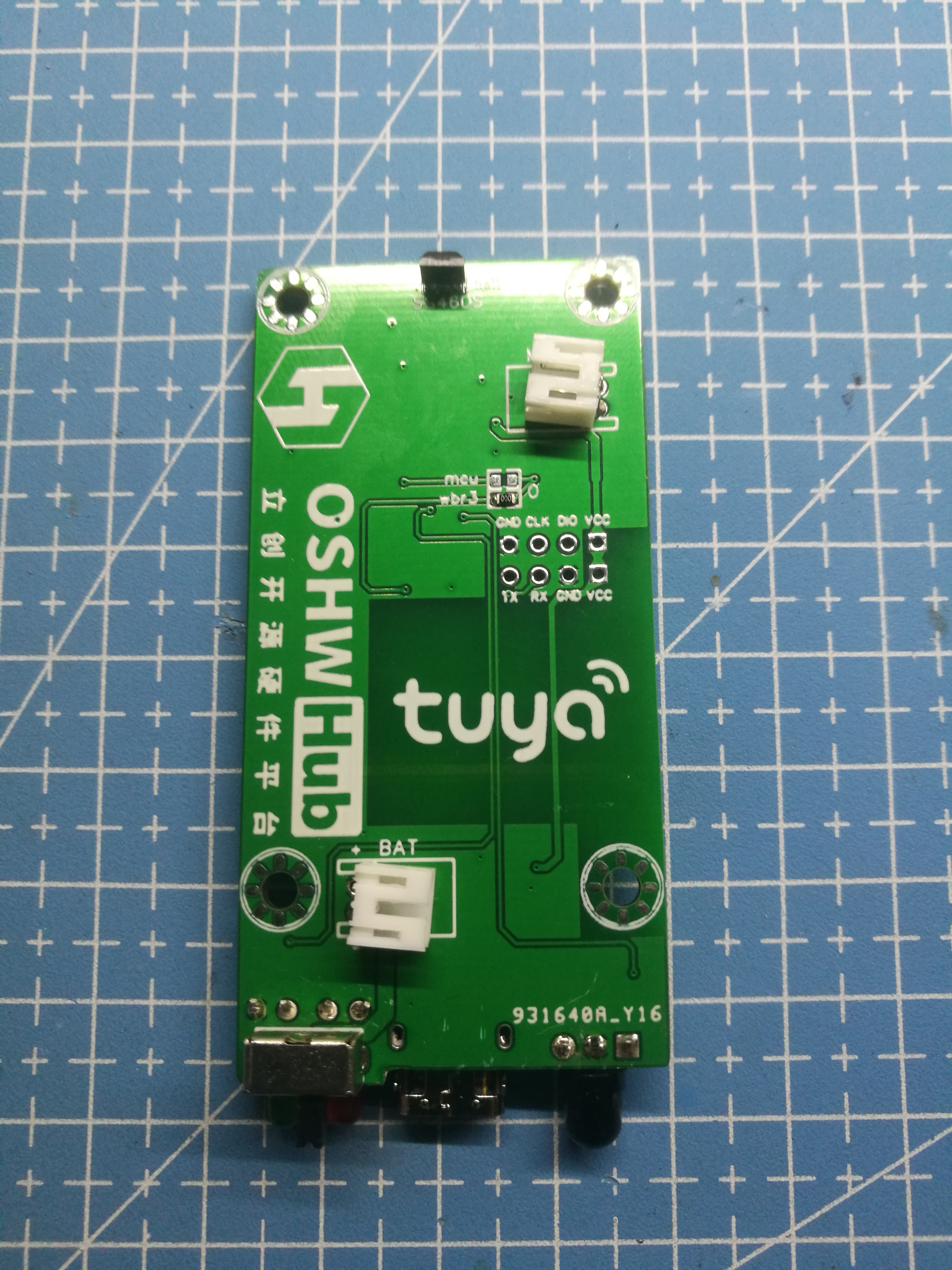
步骤
主板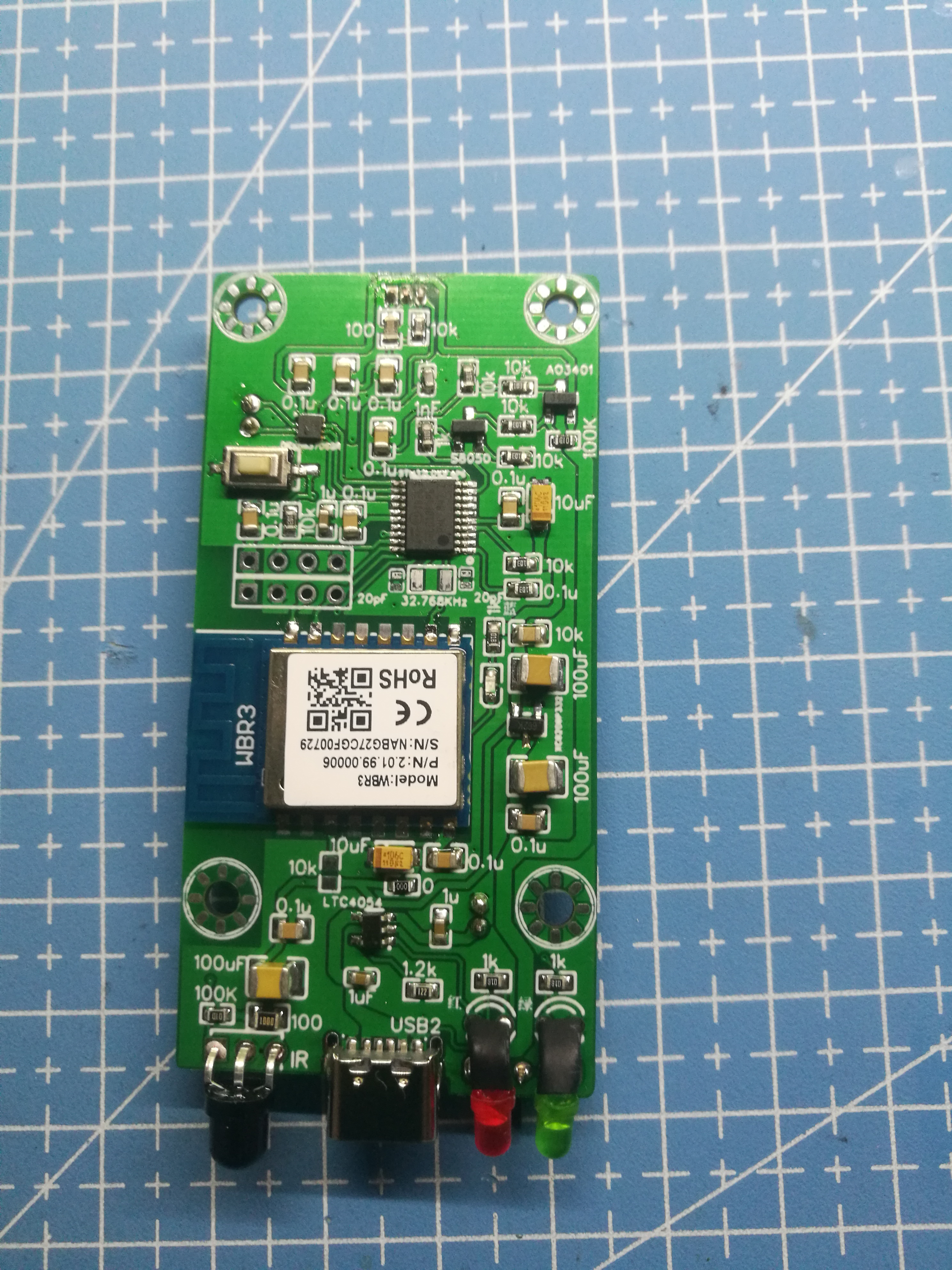
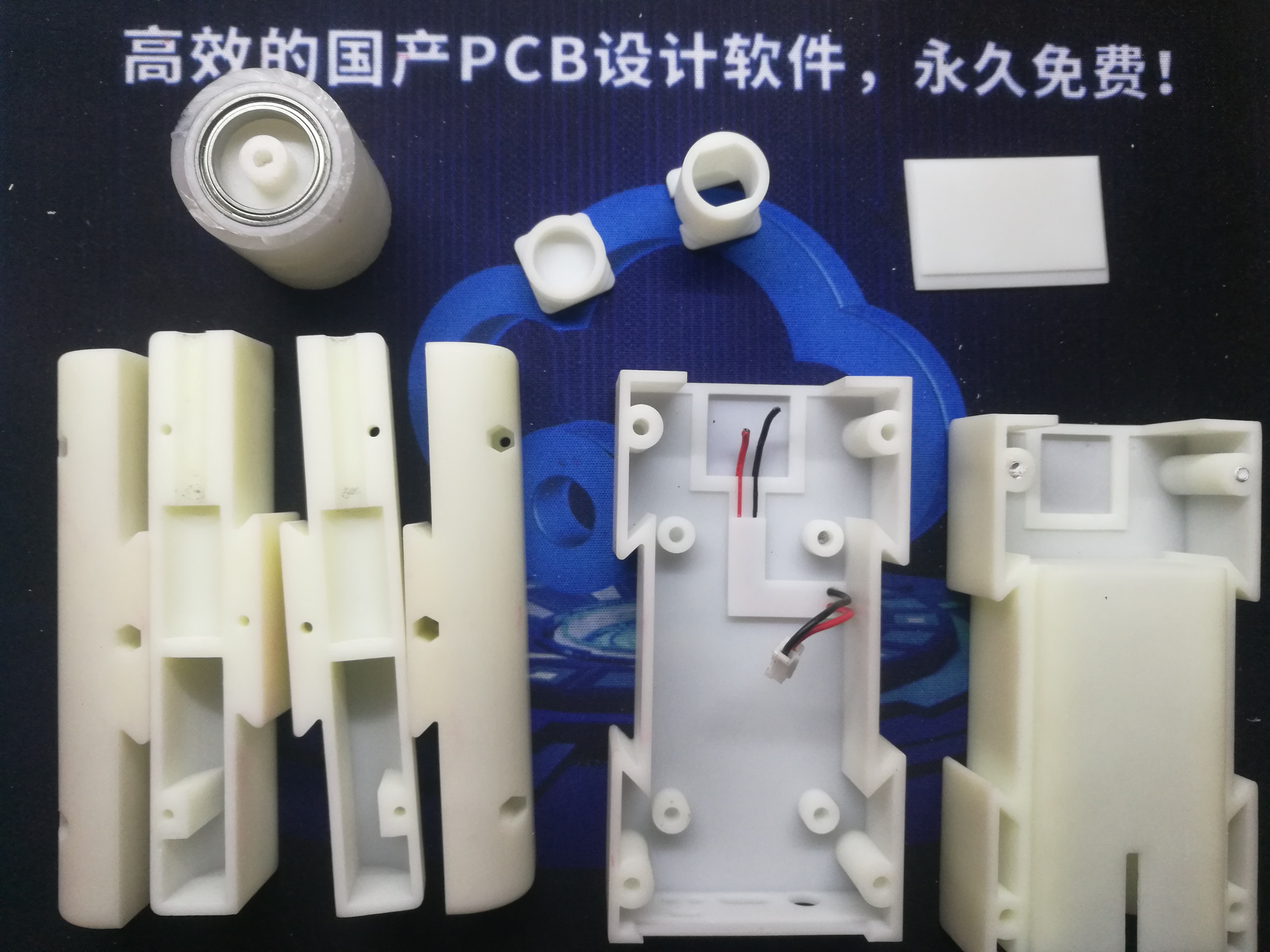
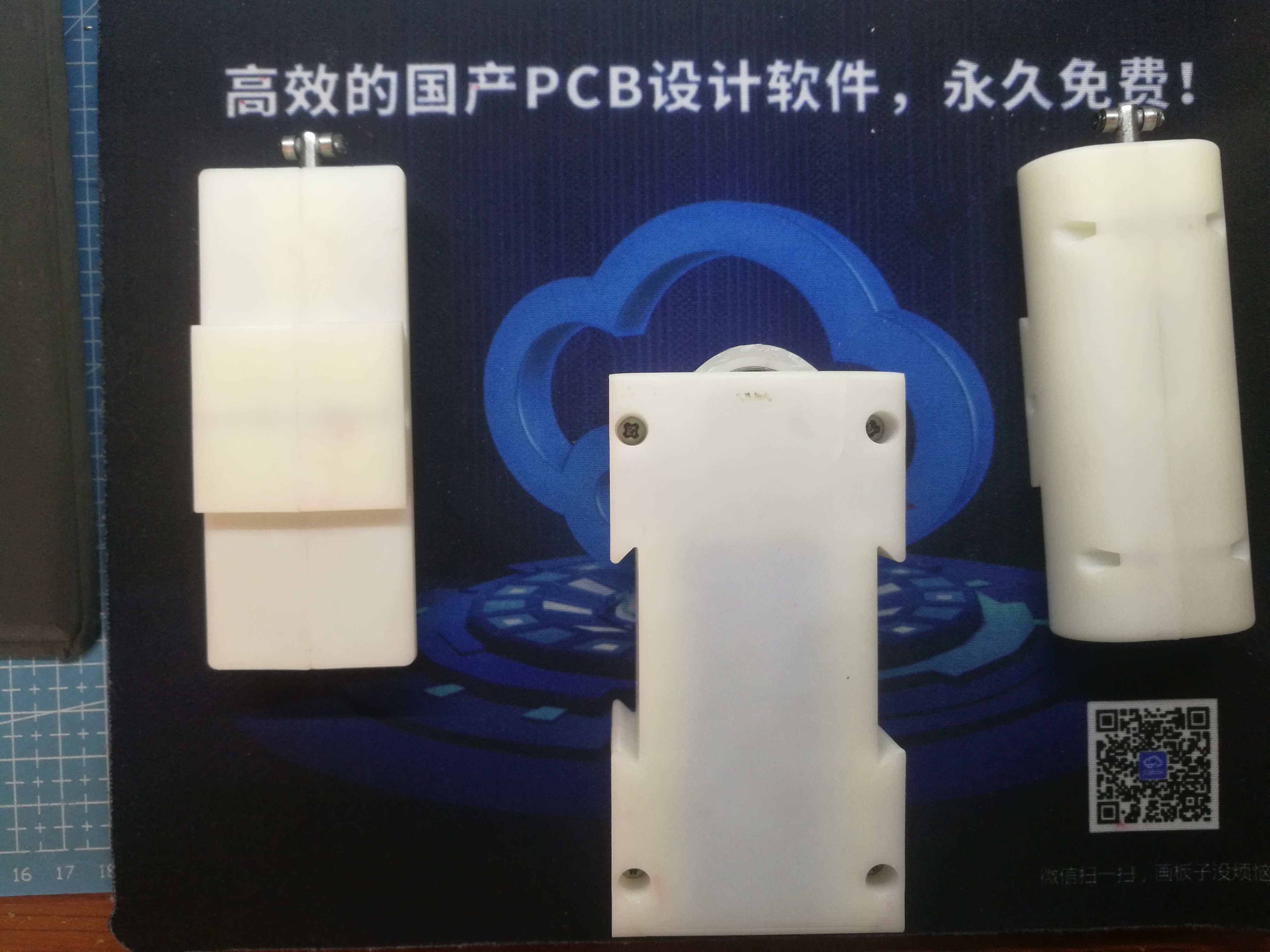
 外壳设计
外壳设计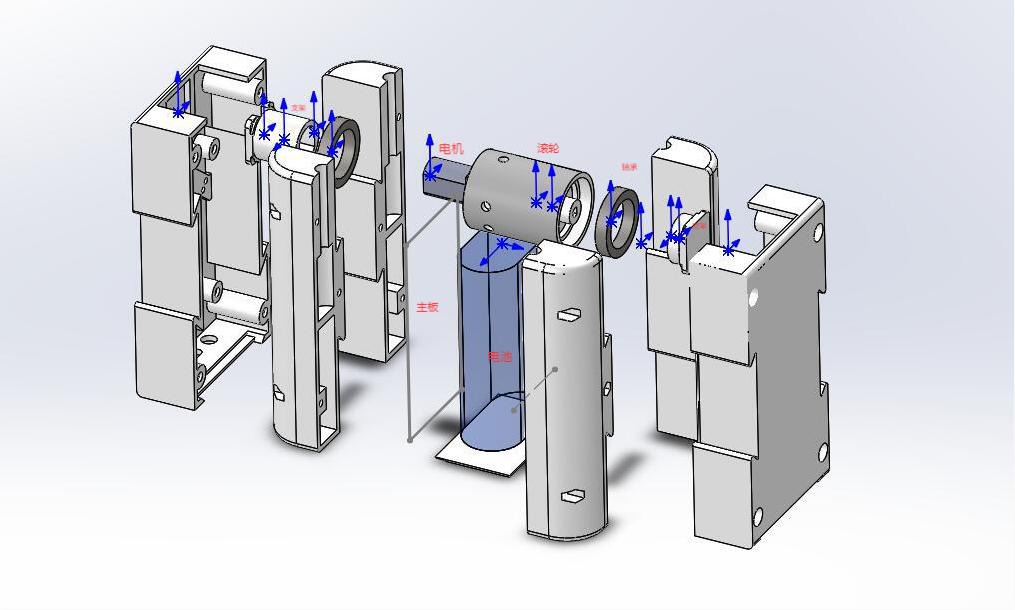
您正在浏览的内容为涂鸦开发者平台注册用户自主发布,版权归原作者所有,涂鸦开发者平台不拥有其著作权,亦不承担相应法律责任,涂鸦开发者平台不对该等内容作出不违反、不侵权的陈述与保证。您应知晓并了解您对于该等内容的复制、改编、转发传播等任何其他使用行为应当符合法律法规并应取得相关权利人的许可,您的该等行为所造成的全部相应后果(包括但不限于侵权、违约、受损、与第三方的纠纷等)均应由您个人承担。内容知识产权相关条款可查看《涂鸦开发者平台用户协议》。如果您发现有涉嫌侵权的内容,请立即通过平台上的联系方式联系平台进行举报并发送有关证据,一经查实,平台将立刻删除涉嫌侵权内容。
喜欢举报

关注“涂鸦智能”
涂鸦服务尽在掌握

关注“全球智能商业”
第一时间获取物联网资讯




