Wi-Fi智能风扇设计与制作(MCU主控)

概况
智能风扇是一款常见的智能设备,用户可以使用手机 App 轻松控制,通过远程控制开关、风速、场景联动等来轻松创造出温暖、放松、舒适的室内空间。本教程采用 Keil5 进行编程,基于涂鸦 IoT 平台和三明治 BLDC 功能板,介绍如何快速开发一款安全性强的智能风扇的原型。
方案介绍
MCU 方案与 SoC 方案不同,传感器和联网模组的驱动代码写在 MCU 中,您可以自己开发 MCU 代码,拥有更多的可玩性。
涂鸦三明治开发板 BLDC 套件中,BLDC 板通过 PWM 接口接收 NUCLEO-G071RB 传过来的 PWM,BLDC 板通过接收到的 PWM 的占空比的大小对电机进行驱动。MCU 控制板通过串口 与 Wi-Fi 通信板连接,使用涂鸦智能 App 配网,可以将BLDC板的输出参数状态展现在手机端。MCU 型号为 STM32G071RB。
相关信息
只需简单的外围处理便可实现高效率的 FOC 电机驱动。FU6832 的有感启动无感运行FOC驱动主要应用在各类低压风机上,典型应用如落地扇、空气净化器等。
注意:虽然 BLDC 功能板支持串口,按键和PWM控制,但是 MCU 控制板和 Wi-Fi 通信板通过右下角串口通信,为了减少对 BLDC 控制的影响,该功能板默认是只支持 PWM 控制的。
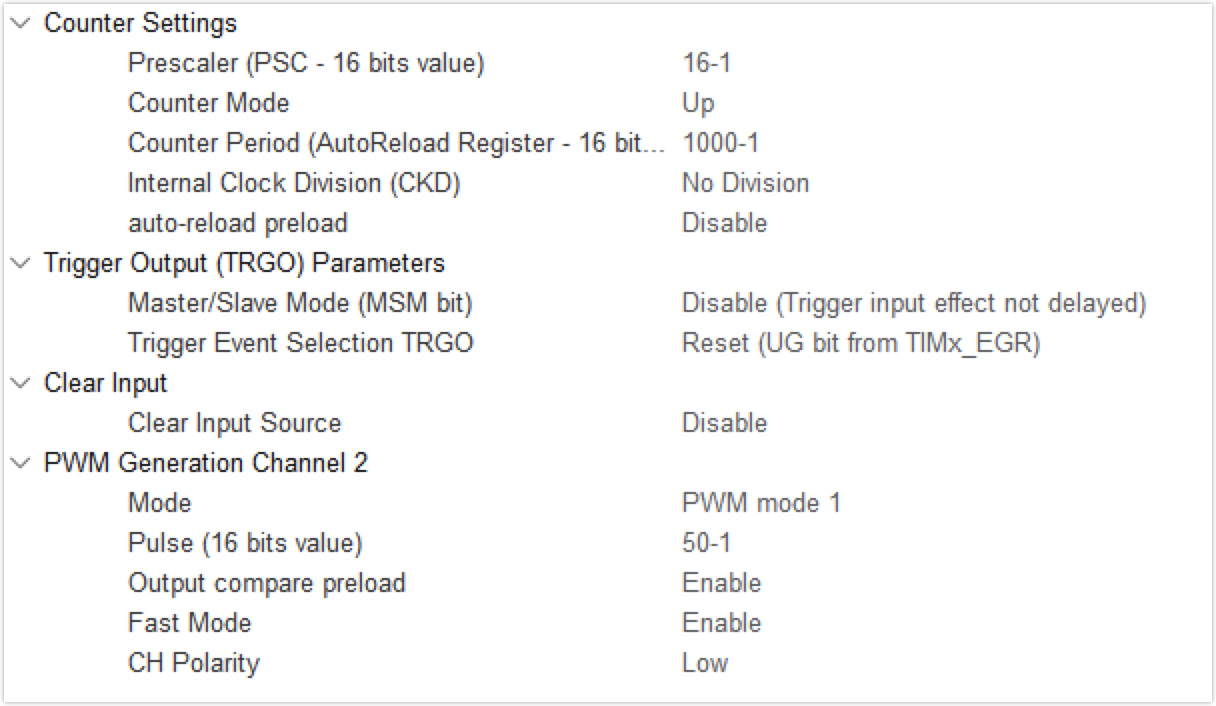
BLDC 板的采样频率是 12M,通过 PWM 占空比的大小来控制电机转速的,输入 PWM 占空比越大转速越快。PWM 占空比越大转速越快,本教程中预设的输出频率为 1000HZ。
- 开机 PWM 占空比:0.08,大于该占空比时开机
- 关机 PWM 占空比:0.06,小于该占空比关机(停机占空比不要设置为改变转向占空比区间内)
- 改变转向的 PWM 占空比:0.01~0.025,处于该占空比则停机改变方向
- PWM 输出极性(Polarity)为低(LOW)
PWM配置示例(主频 16M)如下图所示:
物料清单
涂鸦三明治 Wi-Fi MCU 通信板(WB3S)
数量:1板载涂鸦 WB3S 模组,负责智能化连接。模组已烧录通用固件,MCU 对接涂鸦串口协议,即可使用涂鸦模组、App、云一站式智能化服务。查看详情
涂鸦三明治BLDC电机驱动功能板
数量:1负责通过判断接收到的 PWM 的占空比大小进行对电机的控制。
涂鸦三明治直流供电电源板
数量:1用标准的 Arduino 外形尺寸,您可以直接将相应的开发板堆叠在上方进行供电。因对BLDC功能板需要 12V,5V,3.3V 电源,使用电源板可以减少排线。查看详情
NUCLEO-G071RB
数量:1采用 ST 官方 MCU 主控板,负责传感数据接收和模组通讯控制。NUCLEO-G071RB 开发板支持 Arduino 接口。
步骤
第 1 步:硬件连接和例程环境
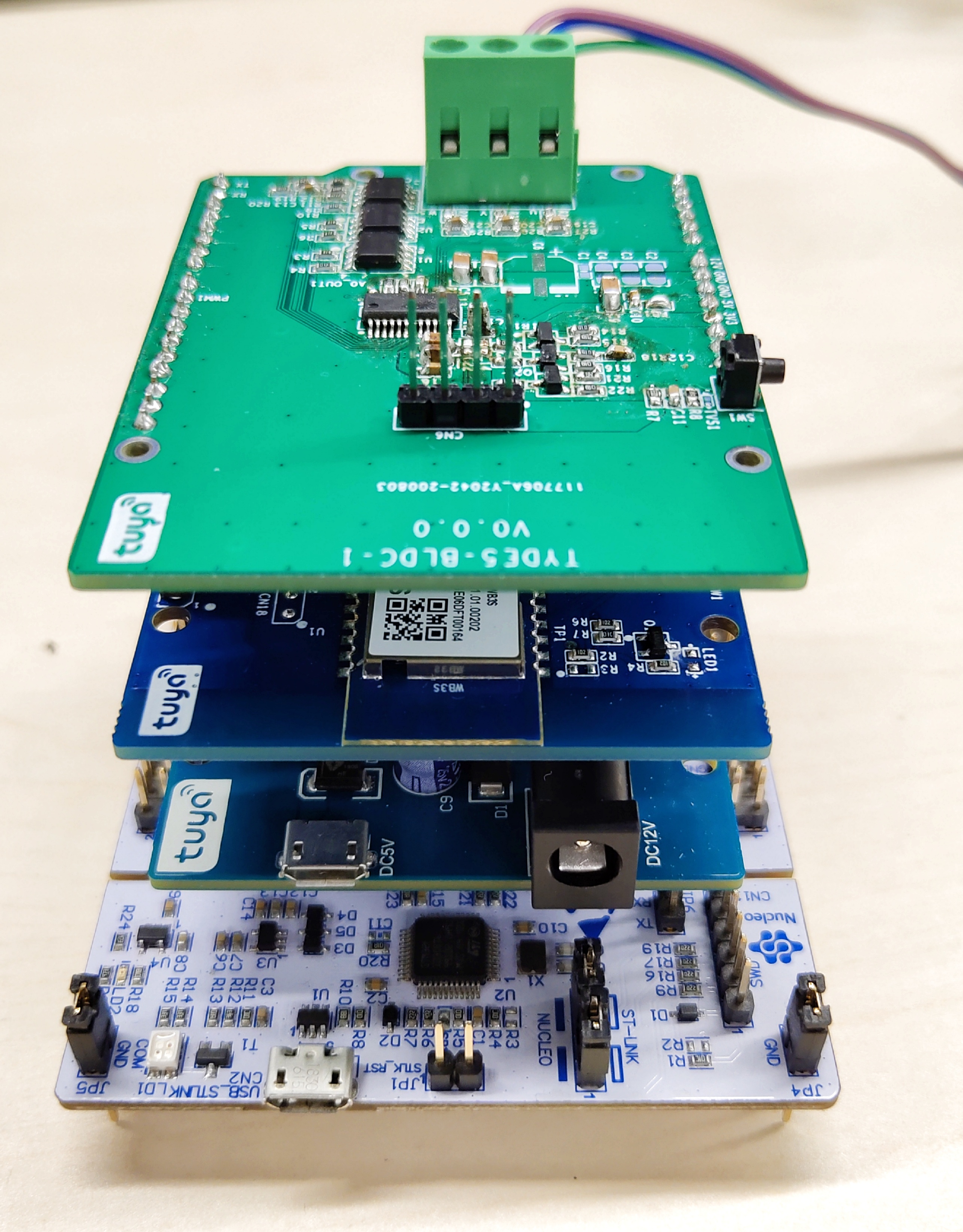
本次使用的涂鸦三明治开发板 BLDC 套件主要包含:
- BLDC 功能板
- Wi-Fi MCU 通信板
- NUCLEO-G071RB
- 涂鸦直供电源电源板
将三明治开发板套件电源板,控制板、通讯板、功能板拼接组装,实物效果如下图。
软件开发过程主要基于 Keil5 实现 MCU 与传感器和模组协议对接。首先调通 MCU 和模组的通讯,可以实现App配网,MCU 数据传输到App。
第 2 步:创建产品和工程
您可以根据以下步骤,快速在涂鸦 IoT 平台上开发一个智能风扇。-
进入 涂鸦智能IoT平台。
-
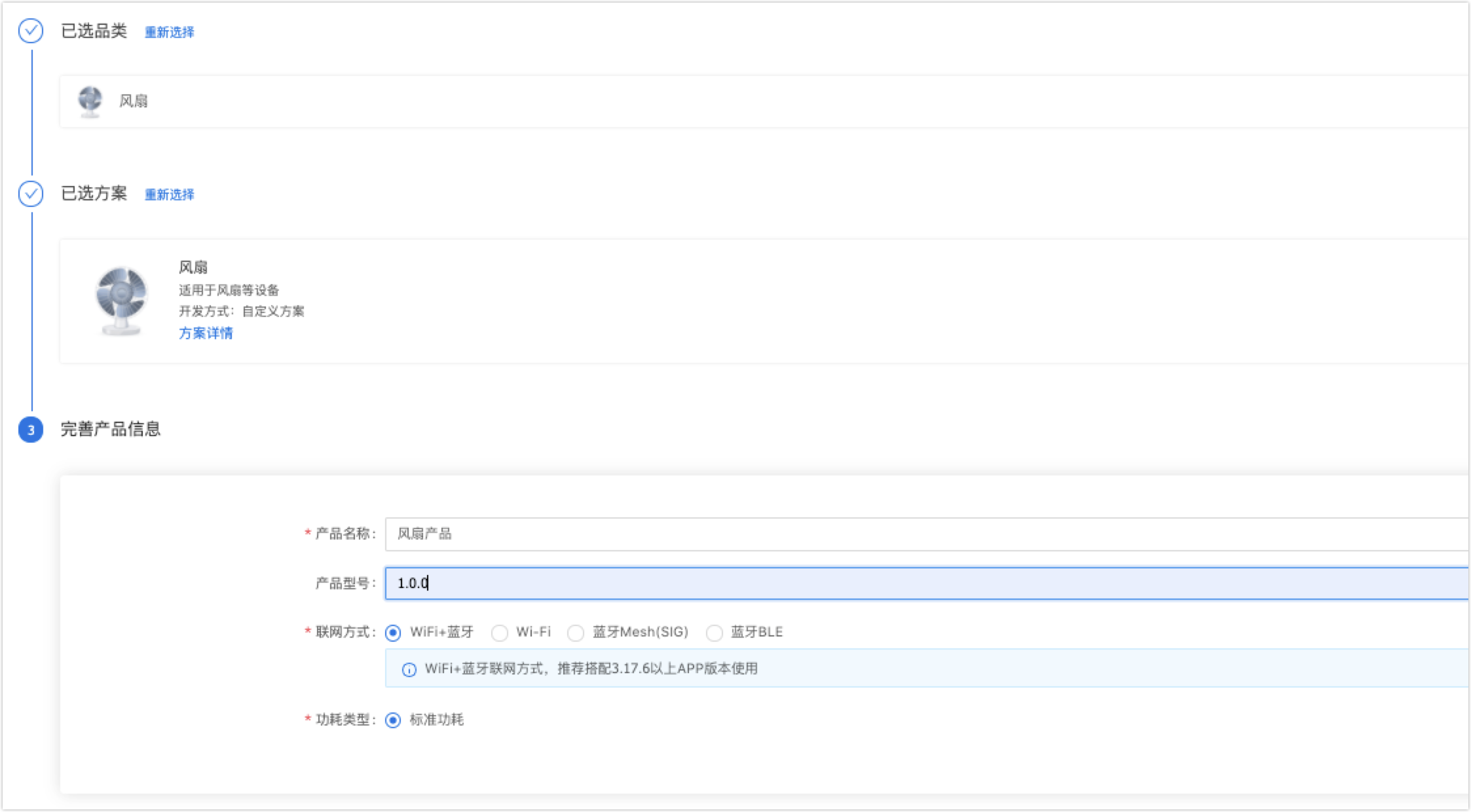
参考 选品类创建产品 创建一款风扇产品。其中产品属性如下:
- 开发方式:自定义方案
- 联网方式:Wi-Fi
- 功耗类型:标准功耗
-
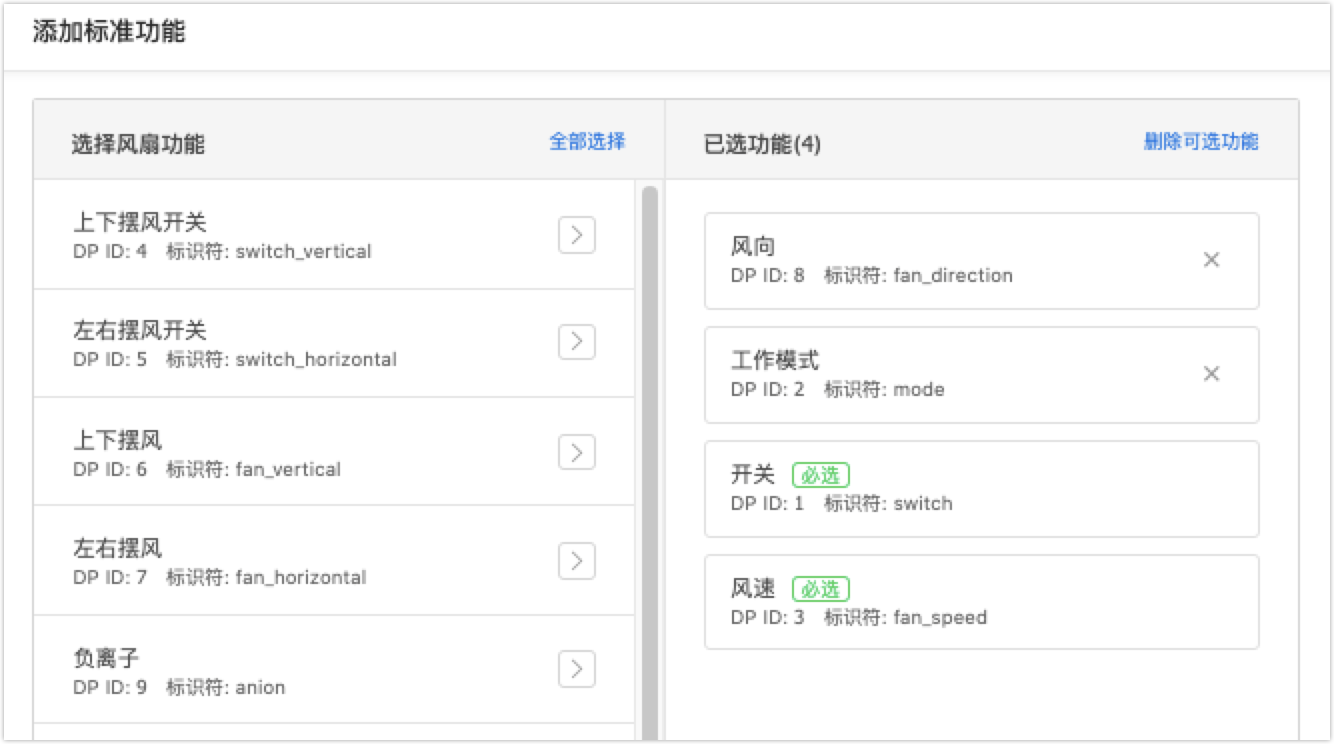
根据页面提示选择产品的标准功能和自定义功能。例如,功能选择为风向、风速、工作模式、开关等。
您还可以对某一项功能进行编辑。例如,如果您选择了工作模式功能,可以继续修改模式为自然风和睡眠风两种。
-
选择您喜欢的面板,第一次开始调试也可以选择为开发调试面板,便于调试,后面也可以更换面板。
-
面板选择完后,进入 硬件开发 阶段,在页面拉到最下面,下载开发资料。
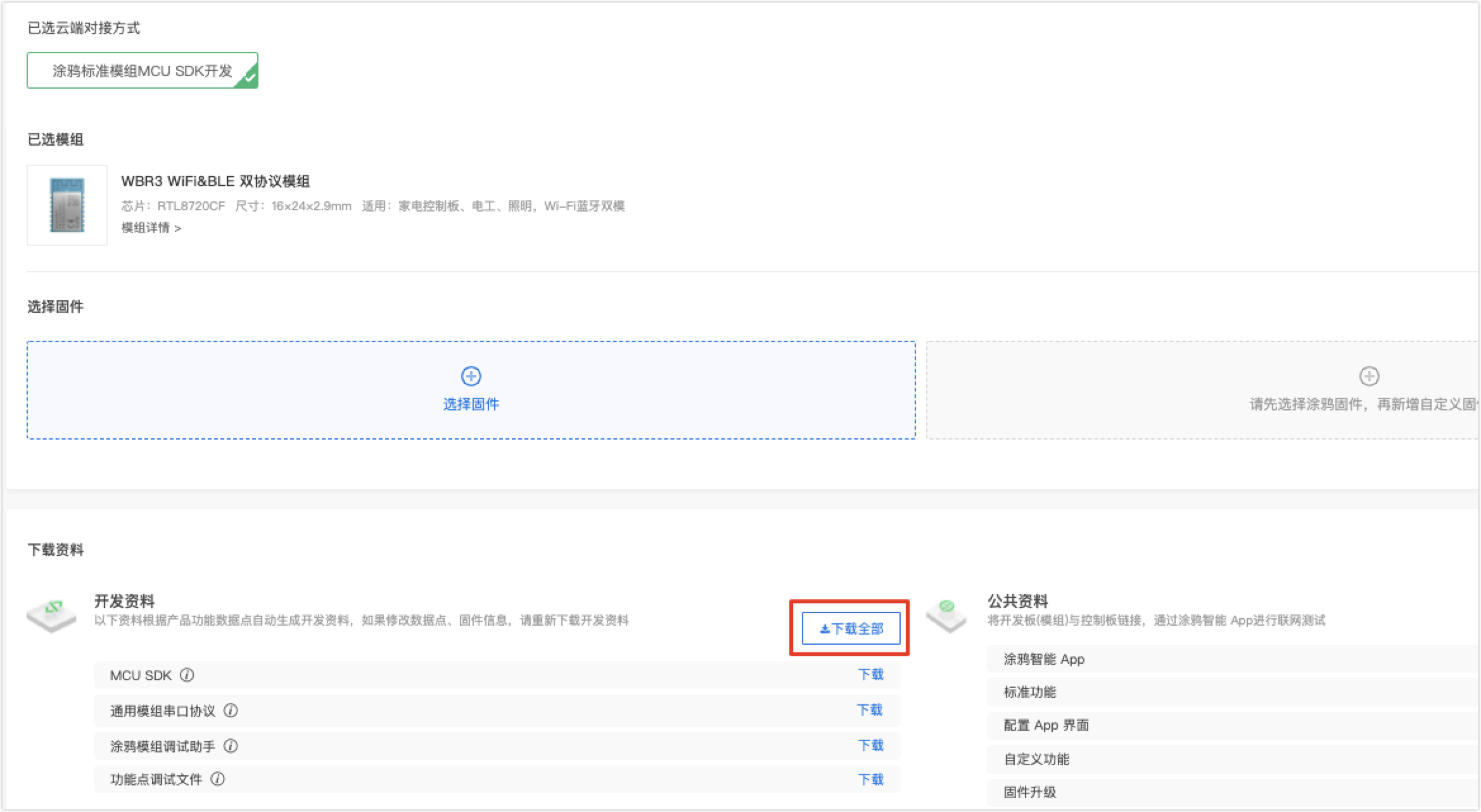
-
硬件测试。
下载到 MCU 开发包后,使用开发包中的涂鸦模组调试助手,您可以使用助手模拟 MCU 模式,配合调试模组通讯板,验证模组是否通讯正常,同时也可以熟悉涂鸦串口协议提高对接效率。确定通信板正常可用的,可以跳过此步骤。若调试过程中对协议收发有疑问,也可以使用此助手协助查看正确数据交互格式。 使用步骤可参考 涂鸦模组调试助手使用说明。
-
第 3 步:移植 MCU SDK
本章节简单介绍了移植过程和功能实现,将
mcu_sdk中的文件加入工程后,编译根据报错提示,进行修改。如需查看详细的移植调试教程,请参考 MCU SDK 移植。-
如果编译过程中发生错误
#40: expected an identifier DISABLE = 0类似的错误提示,可以包含头文件#include "stm32f1xx.h来解决。对应头文件为实际芯片型号,例如,一个 G071RB 的芯片可以添加为#include "stm32g0xx.h。本教程因为没有介绍 Wi-Fi 功能测试,所以注释了
WIFI_TEST_ENABLE的宏。//#define WIFI_TEST_ENABLE -
完善
uart_transmit_output()函数。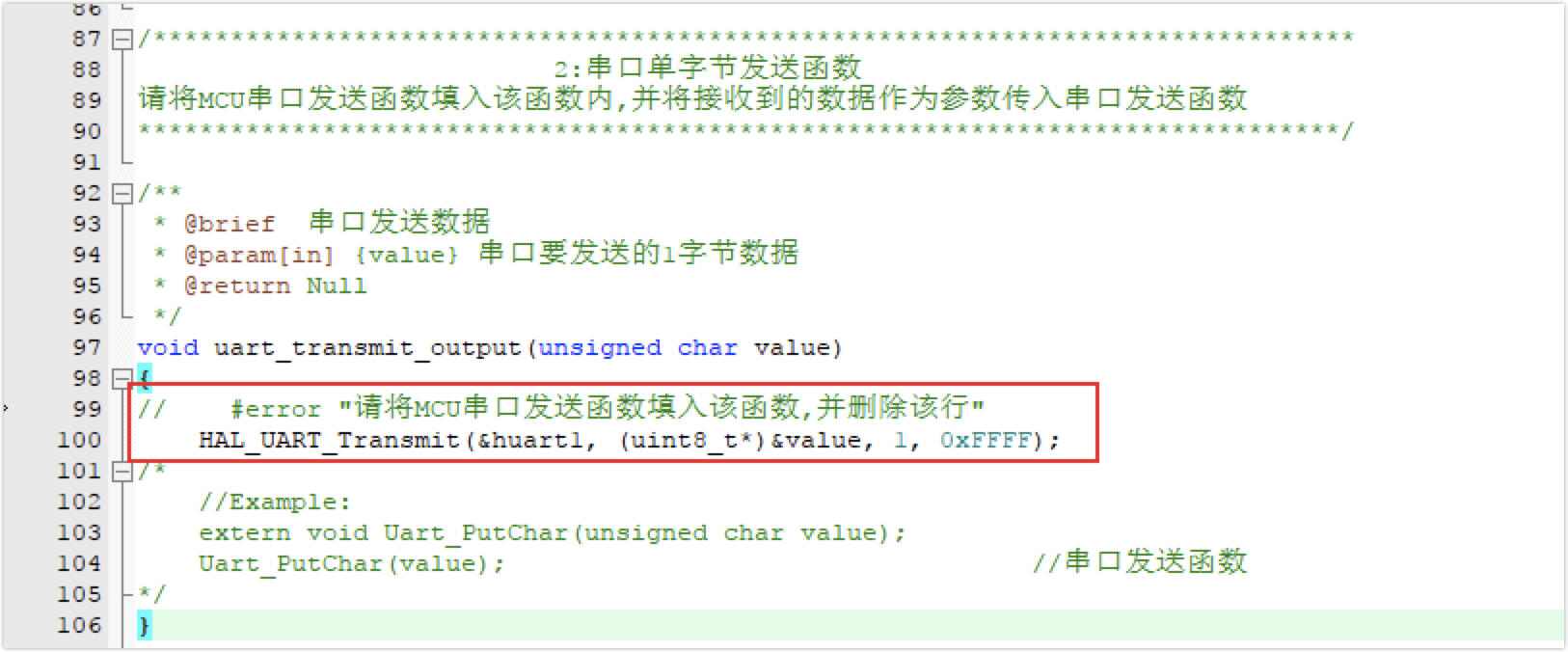
-
完善
uart_receive_input()函数。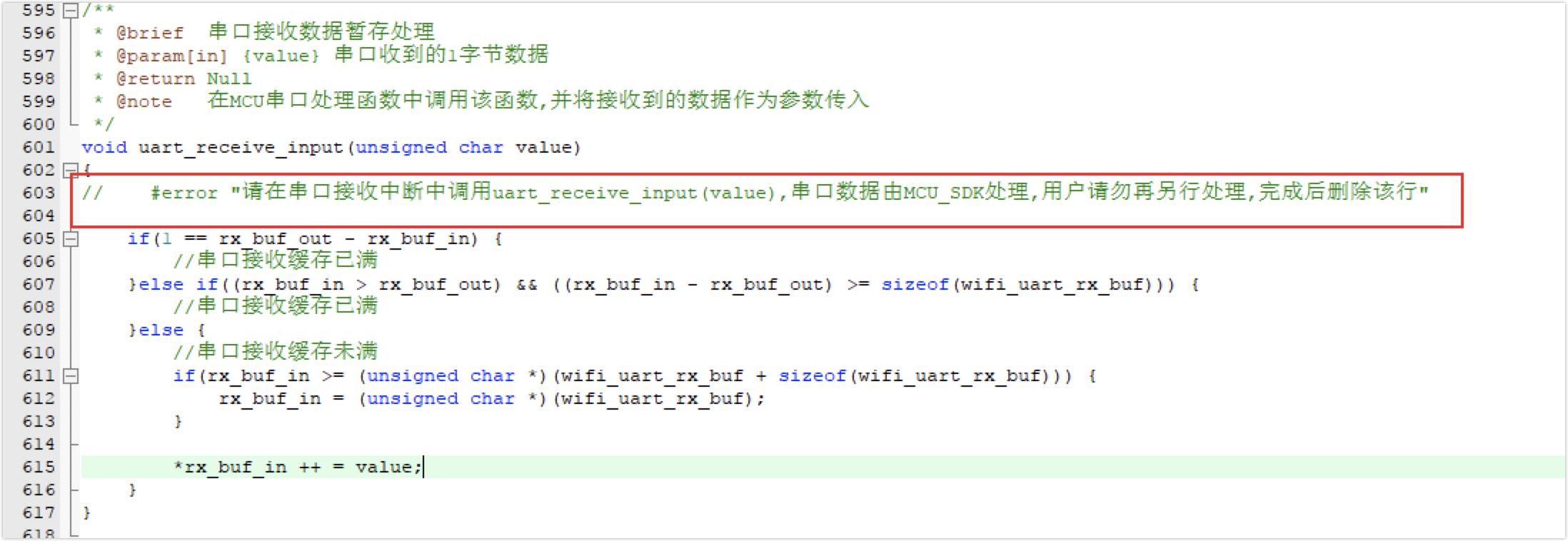
-
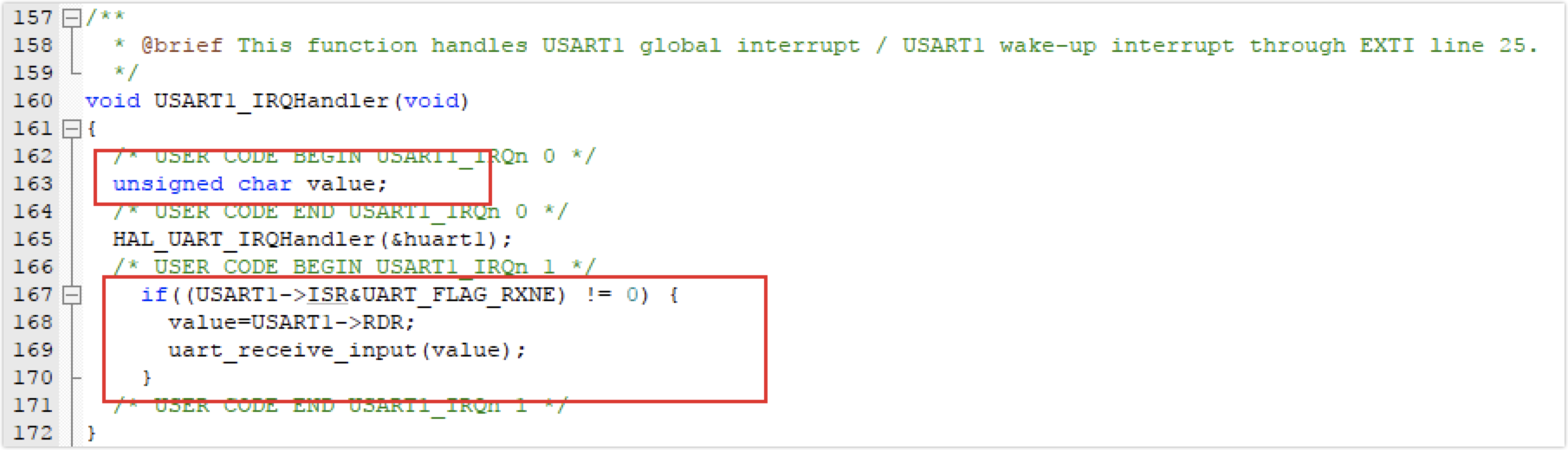
在MCU与WIFI通信板连接的串口的中断服务函数中添加以下代码,注意添加头文件或声明您用到的函数。
-
将
wifi_uart_service()函数按照#error中的提示信息处理,处理后注释掉。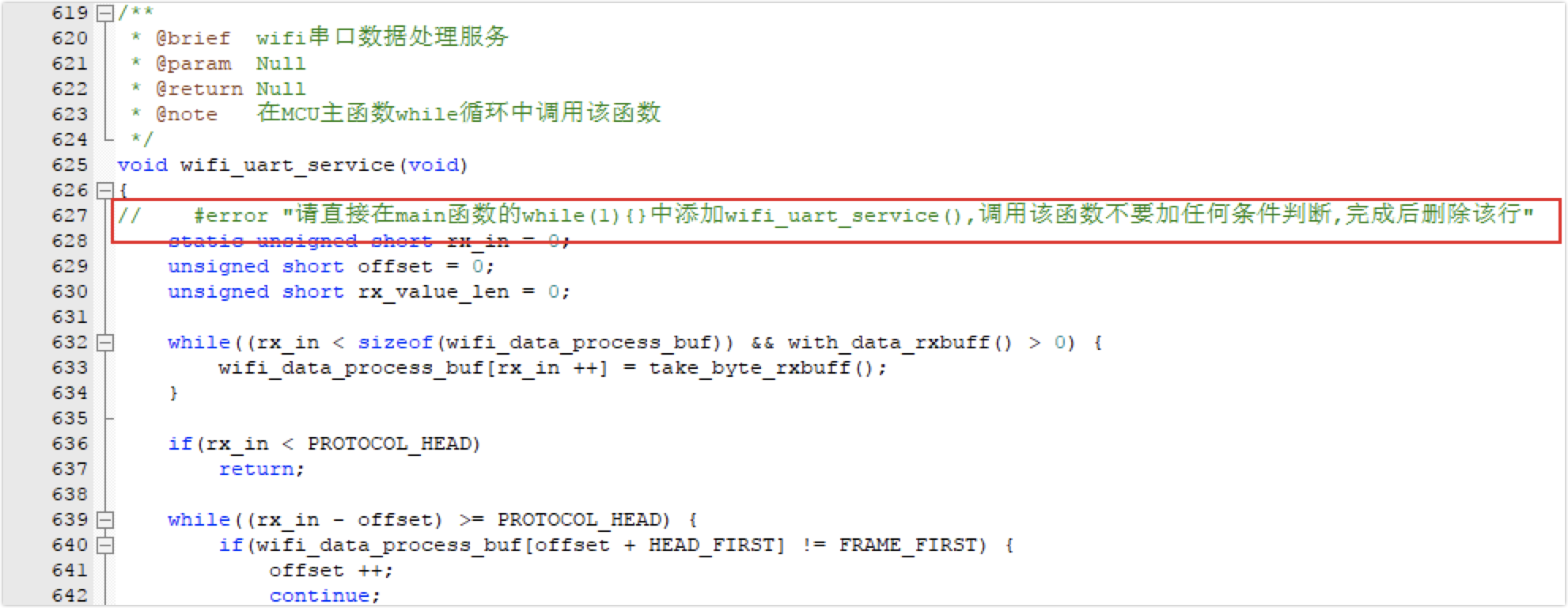
-
将
wifi_protocol_init()函数按照#error中的提示信息处理,处理后注释掉。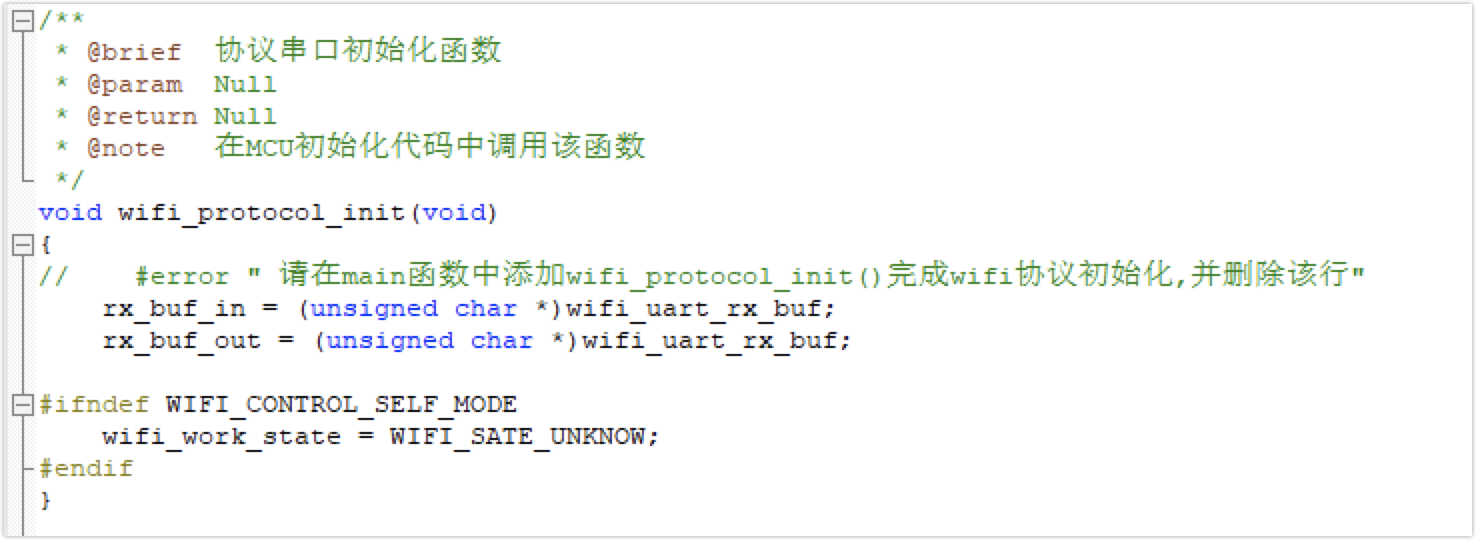
接下来便是
all_data_update()函数,该函数会自动上报系统中所有DP信息,您不需要调用该函数。-
第 4 步:定义结构体
定义一个结构体,用来记录电扇的工作状态。
//工作模式 typedef enum { nature = 0, sleep }fan_mode_t; //正反转 typedef enum { forward = 0, reverse }fan_direction_t; //电扇工作状态结构体 typedef struct { _Bool OnOff; fan_mode_t e_fan_mode; unsigned long speed; fan_direction_t e_fan_direction; }fan_status_t; //电扇状态结构体,全局变量 fan_status_t gs_fan_status = { .OnOff = FALSE, .e_fan_mode = nature, .speed = 10, .e_fan_direction = forward };在protocol.c文件中,完善dp_download_switch_handle(),dp_download_mode_handle(),dp_download_fan_speed_handle()和dp_download_fan_direction_handle()这四个功能处理函数。
在protocol.c文件的dp_download_switch_handle()函数中:static unsigned char dp_download_switch_handle(const unsigned char value[], unsigned short length) { //示例:当前DP类型为BOOL unsigned char ret; //0:关/1:开 unsigned char switch_1; switch_1 = mcu_get_dp_download_bool(value,length); if(switch_1 == 0) { //开关关 gs_fan_status.OnOff = FALSE; }else { //开关开 gs_fan_status.OnOff = TRUE; } //处理完DP数据后应有反馈 ret = mcu_dp_bool_update(DPID_SWITCH,switch_1); if(ret == SUCCESS) return SUCCESS; else return ERROR; }在protocol.c文件的dp_download_mode_handle()函数中:
static unsigned char dp_download_mode_handle(const unsigned char value[], unsigned short length) { //示例:当前DP类型为ENUM unsigned char ret; unsigned char mode; mode = mcu_get_dp_download_enum(value,length); switch(mode) { case 0: gs_fan_status.e_fan_mode = nature; //自然风模式 break; case 1: gs_fan_status.e_fan_mode = sleep; //睡眠风模式 break; default: gs_fan_status.e_fan_mode = nature; break; } //处理完DP数据后应有反馈 ret = mcu_dp_enum_update(DPID_MODE, mode); if(ret == SUCCESS) return SUCCESS; else return ERROR; }在protocol.c文件的dp_download_fan_speed_handle()函数中:
static unsigned char dp_download_fan_speed_handle(const unsigned char value[], unsigned short length) { //示例:当前DP类型为VALUE unsigned char ret; unsigned long fan_speed; fan_speed = mcu_get_dp_download_value(value,length); /* //VALUE类型数据处理 */ gs_fan_status.speed = fan_speed; //将下发的速度值给全局变量 //处理完DP数据后应有反馈 ret = mcu_dp_value_update(DPID_FAN_SPEED,fan_speed); if(ret == SUCCESS) return SUCCESS; else return ERROR; }在protocol.c文件的dp_download_fan_direction_handle()函数中:
static unsigned char dp_download_fan_direction_handle(const unsigned char value[], unsigned short length) { //示例:当前DP类型为ENUM unsigned char ret; unsigned char fan_direction; fan_direction = mcu_get_dp_download_enum(value,length); switch(fan_direction) { case 0: //判断当前风向是否为正转,当前风向若不是正转,则改变风向,并将当前状态给全局变量 if(gs_fan_status.e_fan_direction != forward) { change_fan_direction(); gs_fan_status.e_fan_direction = forward; } break; case 1: //判断当前风向是否为反转,当前风向若不是反转,则改变风向,并将当前状态给全局变量 if(gs_fan_status.e_fan_direction != reverse) { change_fan_direction(); gs_fan_status.e_fan_direction = reverse; } break; default: break; } //处理完DP数据后应有反馈 ret = mcu_dp_enum_update(DPID_FAN_DIRECTION, fan_direction); if(ret == SUCCESS) return SUCCESS; else return ERROR; }第 5 步:功能实现
在main.c文件中,添加头文件#include "mcu_api.h"和#include “wifi.h”,定义以下宏和变量:
//最小速度时,输出的PWM占空比 //最大速度时,输出的PWM占空比 //最大速度输出的PWM占空比应该为100(建议最大设置为99),我这里因为演示设置较低 //关机输出占空比 //改变风扇转向输出的PWM值,在BLDC开发板中输出PWM在1%~2.5%之间改变电机转向 //睡眠模式下,风速改变时间 //上一次风扇速度,全局变量 unsigned long last_fan_speed = 0; //风速sleep模式下,改变风速计数值和风速改变标志,全局变量 unsigned long fen_count = SLEEP_TIME; _Bool sleep_speed_flag = TRUE;启动后,进入while(1){}循环前需处理的:
void setup(void) { //优先输出频率为1000HZ,占空比为5%,使电机处于关机状态 HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2); __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, (OFF_SPEED * 10)); //打开与涂鸦三明治 Wi-Fi MCU 通信板(E3S)通信的UART1接收中断 __HAL_UART_ENABLE_IT(&huart1, UART_IT_RXNE); //完成wifi协议初始化 wifi_protocol_init(); }在while(1){}循环内:
while (1) { //wifi串口数据处理服务 wifi_uart_service(); //进入配网模式,并改变LED灯状态进行提示 connect_tuya(); if (gs_fan_status.OnOff == TRUE) { //开机 //判断工作模式 check_mode(); } else { set_fan_speed(0); } } ``` 在connect_tuya()函数中: ```objectivec //该函数主要功能为:当PC3被拉低后,进入配网模式。根据不同联网状态,改变LED灯状态进行提示。 void connect_tuya(void) { //判断PC3是否拉低 if (HAL_GPIO_ReadPin(WIFI_KEY_GPIO_Port, WIFI_KEY_Pin) == GPIO_PIN_RESET) { HAL_Delay(300); if (HAL_GPIO_ReadPin(WIFI_KEY_GPIO_Port, WIFI_KEY_Pin) == GPIO_PIN_RESET) { mcu_set_wifi_mode(0); } } //获取当前连接状态,显示LED提示 switch(mcu_get_wifi_work_state()) { case SMART_CONFIG_STATE: //SMART配网模式,快闪 HAL_GPIO_TogglePin(LED_GREEN_GPIO_Port, LED_GREEN_Pin); HAL_Delay(250); break; case AP_STATE: //AP配网模式,快闪 HAL_GPIO_TogglePin(LED_GREEN_GPIO_Port, LED_GREEN_Pin); HAL_Delay(250); break; case WIFI_NOT_CONNECTED: //慢闪 HAL_GPIO_TogglePin(LED_GREEN_GPIO_Port, LED_GREEN_Pin); HAL_Delay(250); break; case WIFI_CONNECTED://常亮,连接到WIFI case WIFI_CONN_CLOUD://常亮,连接到WIFI和云平台 HAL_GPIO_WritePin(LED_GREEN_GPIO_Port, LED_GREEN_Pin, GPIO_PIN_SET); break; default: HAL_GPIO_WritePin(LED_GREEN_GPIO_Port, LED_GREEN_Pin, GPIO_PIN_RESET); break; } }
在set_fan_speed()函数中://该函数主要功能为:根据不同转速,输出对应的PWM。PWM频率为1000HZ。 void set_fan_speed(unsigned long speed) { //输入为0,关闭电机 if (speed == 0) { __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, (OFF_SPEED * 10)); last_fan_speed = OFF_SPEED; //将当前转速,记录下来 return; } //判断输入值是否超出最大,最小值 if (speed < MIN_SPEED) { __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, (MIN_SPEED * 10)); last_fan_speed = MIN_SPEED; } else if (speed > MAX_SPEED) { __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, (MAX_SPEED * 10)); last_fan_speed = MAX_SPEED; } else { __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, (speed * 10)); last_fan_speed = speed; } return; } 在check_mode()函数中: void check_mode(void) { if (gs_fan_status.e_fan_mode == sleep) { //进入睡眠模式 if ((sleep_speed_flag == TRUE) && (fen_count >= SLEEP_TIME)) { set_fan_speed(gs_fan_status.speed); //计数清零,改变风速 fen_count = 0; sleep_speed_flag = FALSE; } else if((sleep_speed_flag == FALSE) && (fen_count >= SLEEP_TIME)) { set_fan_speed(MIN_SPEED); //计数清零,改变风速 fen_count = 0; sleep_speed_flag = TRUE; } fen_count++; HAL_Delay(10); } else { if (last_fan_speed != gs_fan_status.speed) { //如果上一次转速和目标转速不一致,改变转速 set_fan_speed(gs_fan_status.speed); } } }
小结
基于涂鸦智能平台, 使用三明治开发板,Keil开发环境您可以快速地开发一款智能风扇产品的原型。
更多信息
BLDC 功能板采用 FU6832s 作为主控芯片,FU6832 系列是一款集成电机控制引擎(ME)和 8051 内核的高性能电机驱动专用芯片,ME 集成FOC、MDU、LPF、PI、SVPWM/SPWM 等诸多硬件模组,可硬件自动完成电机 FOC/BLDC运算控制。8051 内核用于参数配置和日常事务处理,双核并行工作实现各种高性能电机控制。其中8051 内核大部分指令周期为 1T 或 2T,芯片内部集成有高速运算放大器、比较器、Pre-driver、高速 ADC、高速乘/除法器、CRC、SPI、I2C、UART、LIN、多种 TIMER、PWM 等功能,内置高压 LDO,适用于 BLDC/PMSM 电机的方波、SVPWM/SPWM、FOC 驱动控制。
FU6832 内部具有全面保护,包括过压保护,欠压保护, 过流保护,FO保护,堵转保护,缺相保护,过温保护,过功率保护,运放偏置电压异常保护。可根据需要选择使能对应的保护,再根据实际情况微调。
该内容对您有帮助吗?
是我要提建议





