5.x SDK 开发指南
本文介绍了涂鸦 IPC 嵌入式 SDK 的开发流程,从运行 SDK Demo 开始,将开发中所需要的资料串联。您可根据实际需要进行具体功能的开发,可查看对应方案的开发说明,适用于快速入门。
名词解释
| 名词 | 释义 |
|---|---|
| 配网 | 建立设备端、手机 App、云端之间的通信链路。 |
| PID/Productkey | 即产品 ID(Product ID),用来标示某一类产品,同一种类型的 IPC 设备共享同一个产品 ID。PID 关联了产品具有的功能点。 |
| UUID | 即通用唯一识别码(Universally Unique Identifier),由一台机器上生成的数字,保证所有机器都具有唯一性。 |
| AUTHKEY | 设备的授权值,在 涂鸦开发者平台 上已注册能够使用云服务的服务码。 |
| P2P ID | 点对点服务 ID,3.0.0 版本以上 SDK 不需要填写 P2P ID,云端自动进行分配。 |
| Token | 二维码配网过程中,由云服务器生成的标识码,10 分钟有效期。 |
| DP | Data Point,设备与服务器数据交互的功能点。 |
| Chromecast | 谷歌电视棒或谷歌 Home Hub 实时视频传输服务。 |
| Echo Show | 亚马逊音响实时视频传输服务。 |
| IFTTT | 与其他品牌商建立设备联动服务。 |
| OTA | 设备在线升级功能。 |
SDK 目录
SDK 文件导航目录如下:
.
└── tuya_ipc_sdk
├── apps //APP 相关,暂空
├── platforms //暂空
├── sdk //SDK 文件
│ ├── include
│ │ ├── cJSON.h //cJSON 相关
│ │ ├── tuya_cloud_base_defs.h //涂鸦开发者平台的基本定义
│ │ ├── tuya_cloud_com_defs.h //涂鸦开发者平台的通用定义
│ │ ├── tuya_cloud_error_code.h //Tuya SDK 错误的定义
│ │ ├── tuya_cloud_types.h //类型定义
│ │ ├── tuya_cloud_wifi_defs.h //Wi-Fi utils 的定义
│ │ ├── codec
│ │ │ └── tuya_g711_utils.h //G.711 相关
│ │ ├── tuya_ipc_api.h //API 接口相关
│ │ ├── tuya_ipc_cloud_storage.h //云存储相关
│ │ ├── tuya_ipc_img_defs.h //IPC 图像库基本定义
│ │ ├── tuya_ipc_img_proc.h //IPC 图像 API 相关
│ │ ├── tuya_ipc_media.h //IPC 媒体相关
│ │ ├── tuya_ipc_p2p.h //IPC P2P 相关
│ │ ├── tuya_ipc_ptz.h //IPC PTZ 相关
│ │ ├── tuya_ipc_qrcode_proc.h //二维码相关
│ │ ├── tuya_ipc_skill.h //IPC 能力相关
│ │ ├── tuya_ipc_stream_storage.h //IPC 本地存储相关
│ │ ├── tuya_ipc_video_msg.h //IPC 视频消息相关
│ │ ├── tuya_ipc_video_proc.h //IPC 视频检测相关
│ │ ├── tuya_ipc_webrtc.h //IPC web拉流相关
│ │ ├── tuya_ring_buffer.h //ringbuffer 相关
│ │ ├── uni_network.h //网络相关
│ │ ├── ty_wifi_mgnt.h //Wi-Fi 接口相关
│ │ └── ...
│ └── libs
│ ├── libtuya_iot.a
│ └── libtuya_iot.a.stripped
├── bulid_app.sh //忽略,参照 demo 编译方法
├── CHANGELOG.md //说明文档
└── README.md //说明文档
业务流程
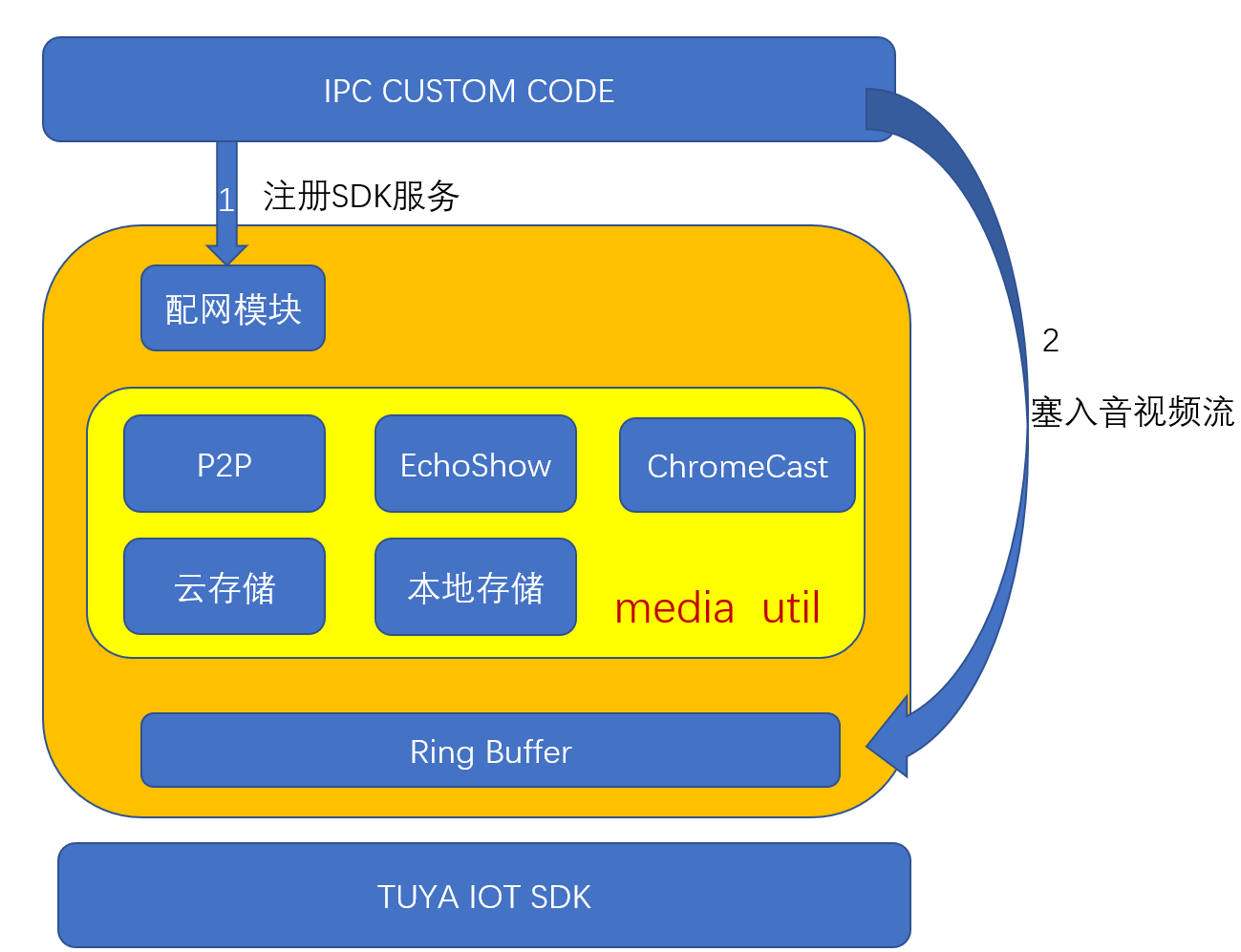
获取到 SDK 后,您首先需要进行 SDK 服务注册。注册操作通过 SDK 配网模块建立,服务通道建立成功后,用户可以将设备的音视频信息按照格式要求送入 SDK 开辟的缓存中,至此用户无需关心后续的操作。
可通过 App 端操控设备。基于原始的的音视频数据,SDK 结合手机端 App 可以实现设备的存储功能、点对点传输服务以及其他的第三方接入功能,例如:Echo Show 和 Chromecast 接入功能。
SDK 架构
Demo 流程
您可以根据以下流程,快速体验涂鸦 IPC SDK 功能。
- 登录 涂鸦开发者平台 创建产品。
- 获取 IPC SDK 包。
- 获取
tuya_ipc_demo。 - 在 App Store 等应用市场下载智能生活 app。
- 在 Linux 环境下做简单适配。
- 运行 Demo,手机移动端直观体验。
第一步:创建产品
-
登录 涂鸦开发者平台。
-
单击 创建产品。

-
选择 摄像机 > 云台摄像机。

-
选择智能化方式并勾选自定义方案。

-
输入产品名称和型号,选择设备类型,并单击 创建产品。

-
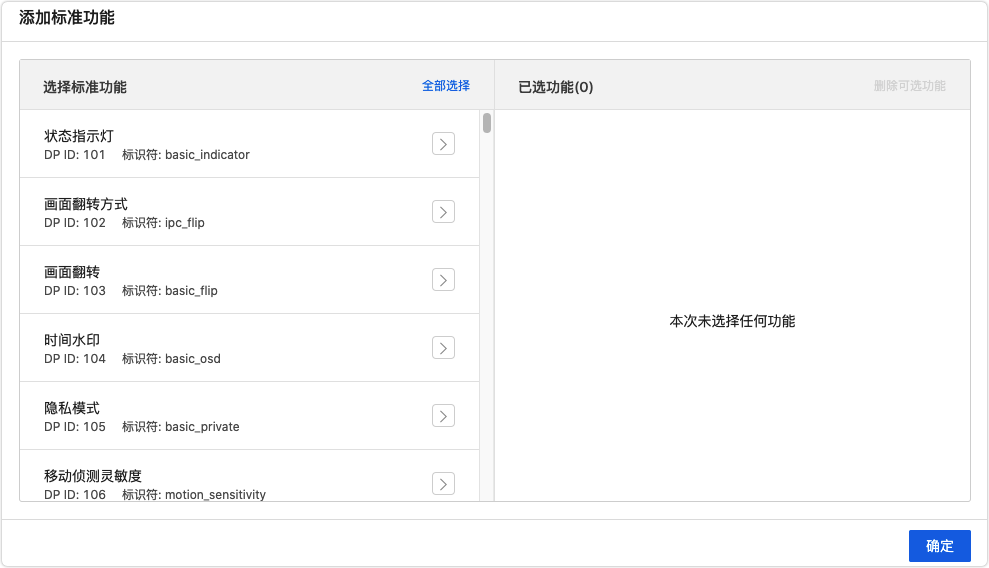
添加需要的 DP。
-
单击 设备交互。

-
下拉页面,选择对应模板。

-
单击 硬件开发,选择芯片平台和模组名称。

-
确定后弹出如下界面,单击 免费领取。

-
选择交付方式,提交订单。

-
单击订单详情。

-
下载授权码清单。

至此,产品创建成功,并获得 2 组试用的授权信息。
第二步:获取 SDK
获取 SDK。如果未能找到您需要的 SDK,请联系您的涂鸦技术支持工程师。
第三步:运行 Demo
-
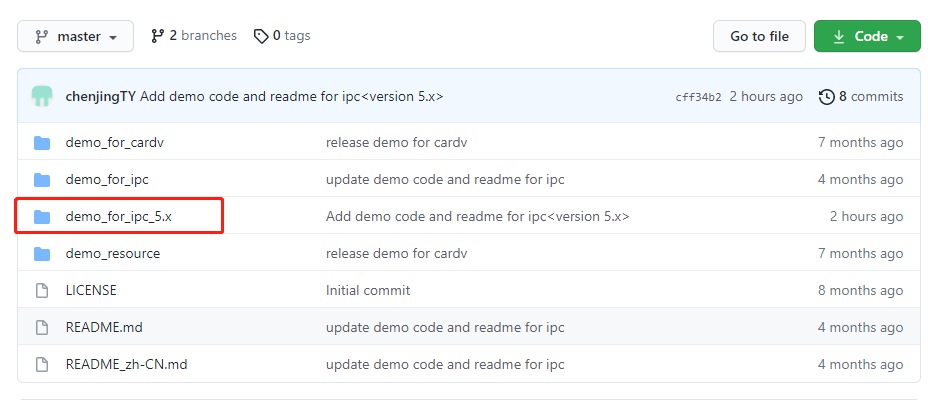
下载 demo 代码。
-
解压 SDK,调整视频文件路径。
解压SDK
将解压后的 SDK 中的 SDK 文件夹(包含
include和lib文件夹),复制到demo_for_ipc_5.x文件夹下。调整视频文件路径
-
方式一(无需改动代码):
将下载的 demo 文件中的
demo_resource复制到demo_for_ipc_5.x文件夹下,并且重命名为resource。在运行时,指定文件位置为当前文件夹即可,
-r后即为视频文件地址。./tuya_ipc_demo -m 2 -p PID -u UUID -a AUTHKEY -r "./" -t "TOKEN" -
方式二(需要改动代码):
在
demo_src文件夹下的user_main.c文件中,跳转至 359 行。strcpy(s_raw_path, "/tmp"); //Path where demo resources locates在此处修改视频文件所在路径。
代码中视频文件名默认为
resource,可以在代码中进行修改,也可将文件夹名改为resource后调整路径。
-
-
编译生成可执行文件。
在终端,进入
demo_for_ipc_5.x文件夹,执行指令:#make APP_NAME=demo当编译完成并显示
[Build APP Finish],即为编译完成。可执行文件生成位置:
demo_for_ipc_5.x/output/文件下,[tuya_ipc_demo]为输出的可执行文件。 -
使用手机下载安装智能生活 App,打开 App,单击添加设备。

-
选择 安防监控 品类 > 智能摄像机(Wi-Fi)。

-
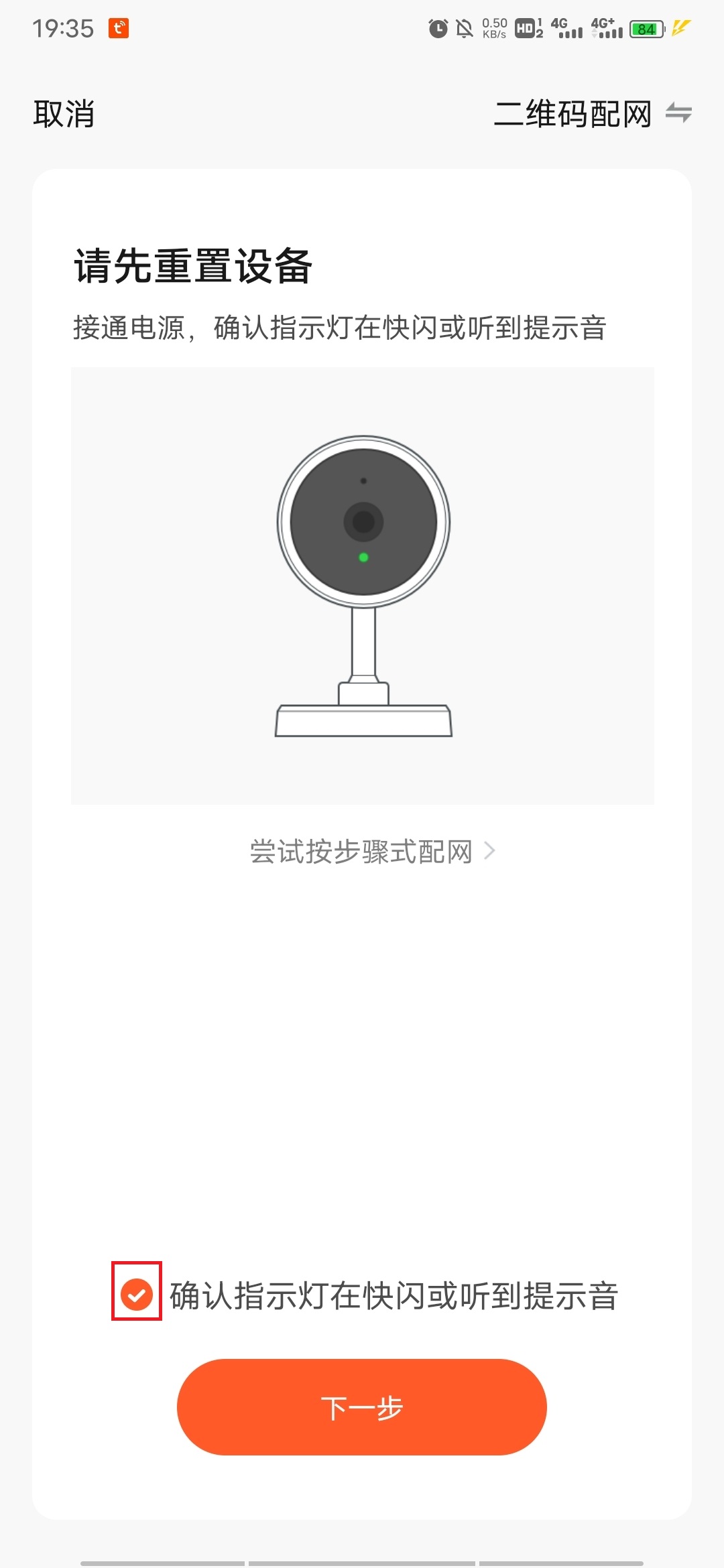
勾选 确认指示灯在快闪或听到提示音,然后单击 下一步。
-
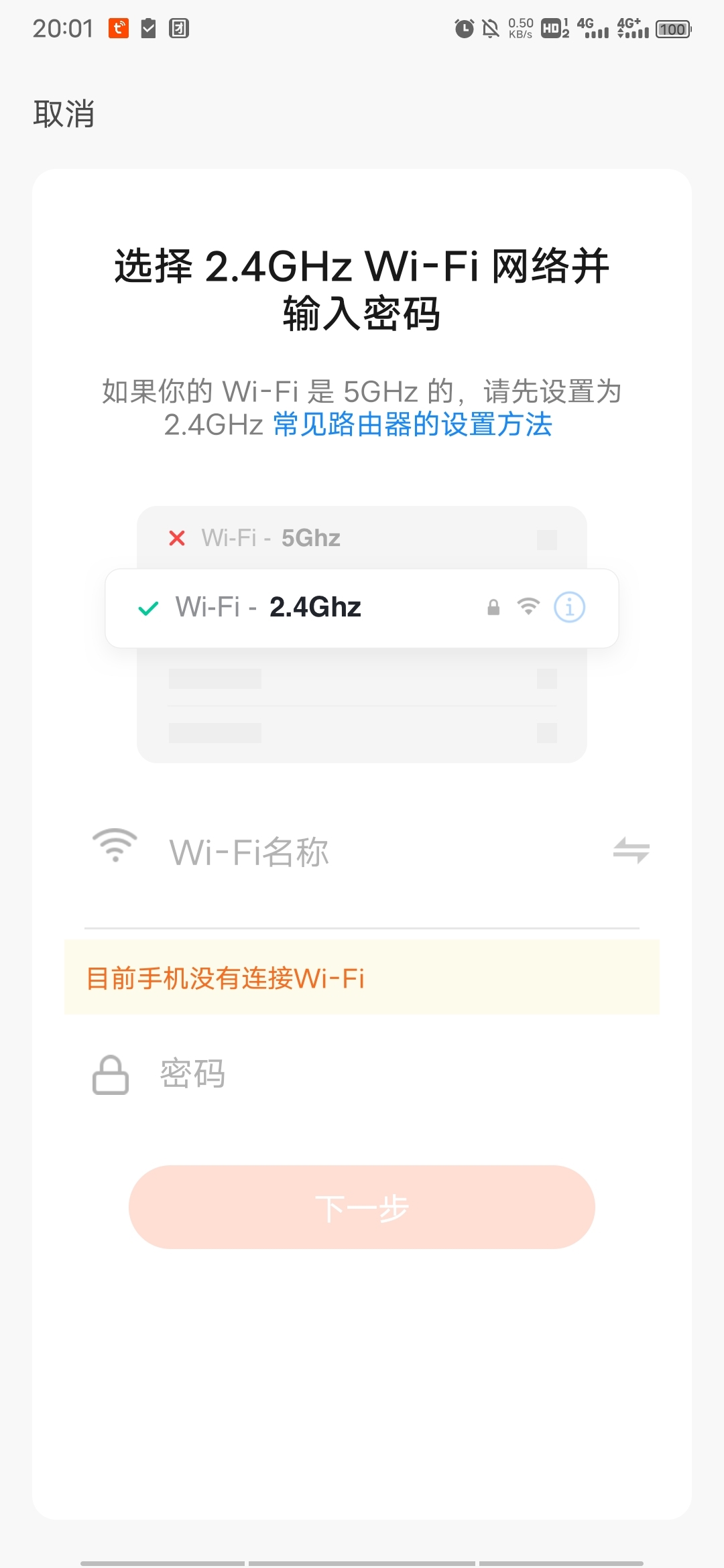
输入 Wi-Fi 名称和密码。
此处连接的 Wi-Fi 需是 2.4 GHz。
-
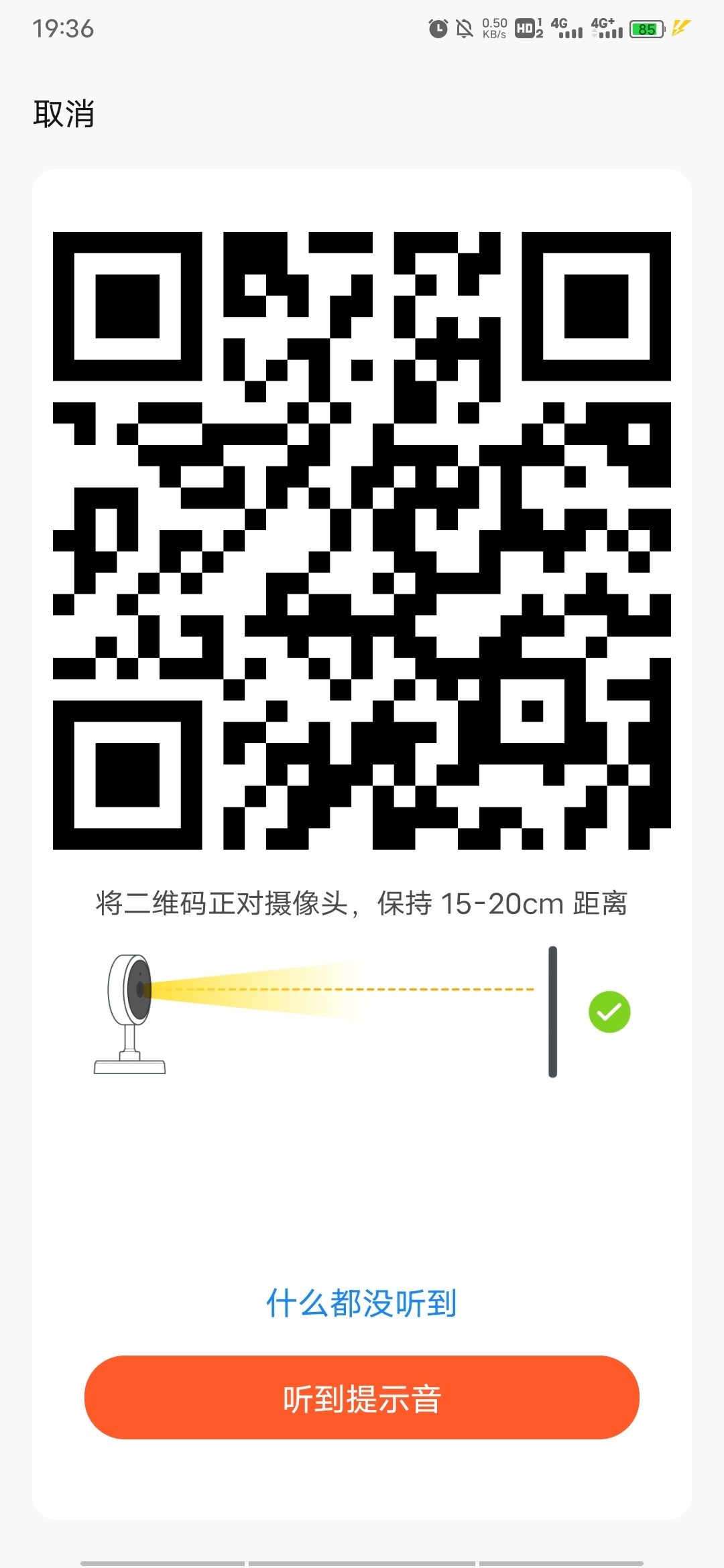
生成和识别二维码。
将二维码进行截屏,打开微信,使用 扫一扫 功能来扫描二维码图片。
此处不要单击 听到提示音 按钮,在第 11 步时再单击。
-
在获取到的数据中,提取 token。
获取到的数据:
{"p":"test","s":"test","t":"AYYBJt2OGvY***"}t后的参数即为 Token,有效期:10 分钟。10分钟后 token 失效,需要按照上诉流程重新获取。 -
在 output/ 文件下执行命令,运行可执行程序。
#在终端输入以下指令 #./tuya_ipc_demo -m 2 -p PID -u UUID -a AUTHKEY -r "./" -t "TOKEN" #注:-m 为配网模式的选择[0,2]。0 为快联配网,1为 AP 配网,2为 debug 配网。PID、UUID 和 AUTHKEY 是通过此前创建产品时获取到的,使用自己获取到的进行替换。-r 为视频文件所在位置,此处为当前文件夹。token 是通过扫码二维码解析获取到的。 -
在执行可执行程序的同时,单击手机 App 上的 听到提示音 按钮。
-
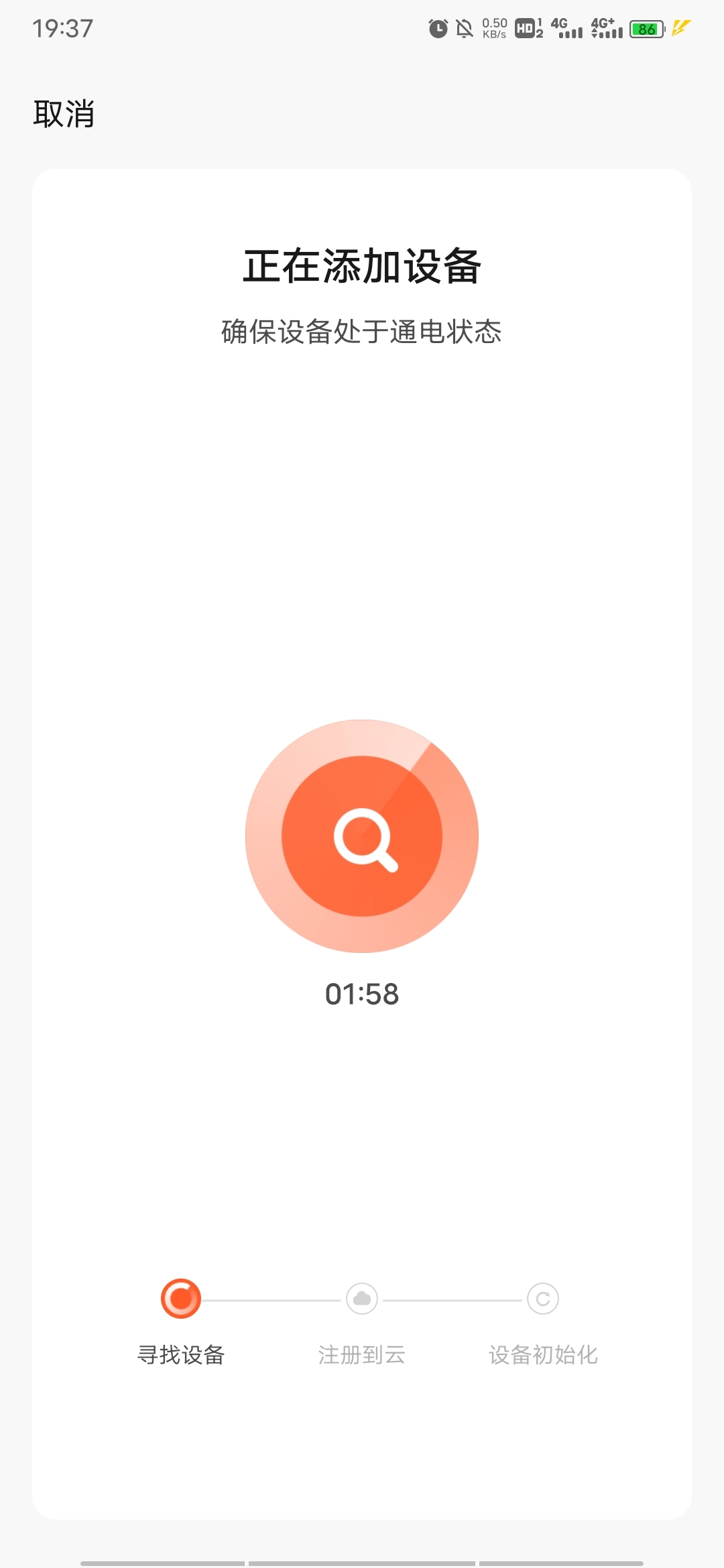
等待一段时间即可添加成功。
单击添加成功的设备,即可成功获取视频流。如果没有视频显示,则表示之前的
demo_resource文件没有设置正确,请至第 2 步检查是否操作正确。
在终端中输入下列指令,可以模拟体验 IPC 功能:
指令 指令说明 start 模拟移动侦测事件触发 stop 模拟停止移动侦测事件 status 获取设备激活状态 bell 模拟门铃事件上报 例如虚拟设备执行过程中,执行:
#start可以在消息中心看到一条移动侦测的上报。

通过上述步骤可以快速体验 IPC SDK 功能。
应用开发
-
您需要在
demo_src/user_main.c文件中,分别修改 DB 文件、OTA 文件、本地录像文件的保存路径,宏定义如下:DB 文件中保存设备的配网信息,需要保存至掉电不丢失的路径下。
DB 文件与本地录像文件保存路径需要检查结尾是否有
/。#define IPC_APP_STORAGE_PATH "/tmp/" #define IPC_APP_UPGRADE_FILE "/tmp/upgrade.file" #define IPC_APP_SD_BASE_PATH "/tmp/" -
PID、UUID、AUTHKEY 的传入:
-
方式一:(建议运行 demo 时使用此方法)
#./tuya_ipc_demo -m 2 -p PID -u UUID -a AUTHKEY -r "./" -t "TOKEN" #替换其中的PID、UUID 和 AUTHKEY 即可,在运行 demo 的快速体验 > 运行demo 第 10 步介绍了其他参数。 -
方式二:(建议开发时使用此方法)
#CHAR_T s_ipc_pid[64]="tuya_pid"; //pid #CHAR_T s_ipc_uuid[64]="tuya_uuid"; //uuid #CHAR_T s_ipc_authkey[64]="tuya_authkey"; //authkey #将 PID、UUID 和 AUTHKEY 替换即可,可以写入到 flash 文件中保存,掉电不丢失
-
-
修改版本号的宏定义:
版本号必需按照格式:
xx.xx.xx进行填写,不超过 20 位字符。#define IPC_APP_VERSION "1.2.3"
至此,SDK 基本参数已完成填写,进入配网模式。
SDK 配网开发
涂鸦 SDK 搭建了一套完整的、用以引导设备配网的函数框架,本章节阐述配网的流程以及各框架函数的用途。建议您按照文档介绍,在对应的框架函数下,实现各功能点的具体操作。
Wi-Fi 快联配网
开发流程
-
在 main 主函数中找到参数 mode,选择:
WIFI_INIT_AUTO配网模式,token 参数填NULL。CHAR_T token[30] = {0}; //token--二维码配网过程中,由云服务器生成的标识码,10min有效期 WIFI_INIT_MODE_E mode = WIFI_INIT_AUTO; //mode--配网模式选择 -
以下接口需要您实现。具体实现可以参考 demo。
//Wi-Fi模块模式的获取接口,默认模式为 sniffer 模式 OPERATE_RET tuya_adapter_wifi_get_work_mode(OUT WF_WK_MD_E *mode) //扫描全部信道并将扫描到的信息传输至结构体 AP_IF_S**ap 中 OPERATE_RET tuya_adapter_wifi_assign_ap_scan(IN CONST CHAR_T *ssid,OUT AP_IF_S **ap) //设置 Wi-Fi 模式。当 SDK 判断 Wi-Fi 输入的空口包数据正确,将 Wi-Fi 状态设置为 station 模式 OPERATE_RET tuya_adapter_wifi_set_work_mode(IN CONST WF_WK_MD_E mode) // sniffer 模式回调函数注册 int tuya_adapter_wifi_sniffer_set(const bool en, const SNIFFER_CALLBACK cb) //根据解析到的数据,进行联网操作 OPERATE_RET tuya_adapter_wifi_station_connect(IN CONST CHAR_T *ssid,IN CONST CHAR_T *passwd) //配网成功后,通知 SDK 已获取到 IP 地址。此接口为高频调用接口。 OPERATE_RET tuya_adapter_wifi_station_get_status(OUT WF_STATION_STAT_E *stat) -
传入 Wi-Fi 接收到的空口包信号进行处理,显示信号强度。
OPERATE_RET tuya_adapter_wifi_station_get_conn_ap_rssi(OUT SCHAR_T *rssi)如需更改成其他接口,请咨询后再进行修改,避免出现未知错误。
二维码配网
开发流程
-
TUYA_IPC_SDK_START函数中,选择:WIFI_INIT_AUTO配网模式,token 参数填NULL。CHAR_T token[30] = {0}; //token是二维码配网过程中,由云服务器生成的标识码,10 分钟有效期 WIFI_INIT_MODE_E mode = WIFI_INIT_AUTO; //mode 是配网模式选择。 -
二维码配网一般流程:
-
抓取二维码图片。
-
将二维码图片传入 zbar 函数(开源函数)进行识别。图像分辨率建议:不低于 320*240。
-
识别获取到的二维码信息(ssid、password 和 token)。
-
根据获取到的信息(ssid、password 和 token),调用
tuya_adapter_wifi_station_connect,建立 MQTT 连接。具体实现流程可以参照
demo_src/tuya_ipc_qrcode_demo.c文件,需要启动文件中的线程进行功能的调用。
-
-
以下接口需要您实现。具体实现可以参考demo。
//Wi-Fi模块状态的获取 OPERATE_RET tuya_adapter_wifi_get_work_mode(OUT WF_WK_MD_E *mode) //数据的获取和解析,需要分析摄像头获取到的二维码信息 STATIC CHAR_T* __tuya_linux_get_snap_qrcode(VOID) //根据解析到的数据,进行联网操作 OPERATE_RET tuya_adapter_wifi_station_connect(IN CONST CHAR_T *ssid,IN CONST CHAR_T *passwd)如需更改成其他接口,请咨询后再进行修改,避免出现未知错误。
有线配网(局域网发现)
-
设备端调用:
TUYA_IPC_SDK_START函数进行 SDK 初始化。 -
以下接口需要您实现。具体实现可以参考
demo_src/tuya_ipc_wired_demo.c。//设备获取 IP 地址。设备在检测到已连接路由器时,返回获取到的 IP 地址 OPERATE_RET tuya_adapter_wifi_get_ip(IN CONST WF_IF_E wf,OUT NW_IP_S *ip) //获取设备 MAC 地址 OPERATE_RET tuya_adapter_wifi_get_mac(IN CONST WF_IF_E wf,INOUT NW_MAC_S *mac) -
SDK 将获取到的设备 IP 地址与 MAC 地址通过路由器发送广播包,手机连上路由器 Wi-Fi 并接收到广播信息后,向服务器获取 token,获取成功后给到设备端进行联网。至此,配网操作完成。
如需更改成其他接口,请咨询后再进行修改,避免出现未知错误。
直连扫码(手机扫设备二维码)
-
确认已下载带有直连扫码功能的涂鸦 SDK,涂鸦 UUID 经过后台打标处理。
-
运行时确保设备已连接到 Internet。
-
调用:
TUYA_IPC_SDK_START函数进行 SDK 初始化。入参WIFI_INIT_MODE_E选择:WIFI_INIT_NULL,token 填写NULL。 -
手机单击右上角扫描图标,扫描二维码激活设备。
如需更改成其他接口,请咨询后再进行修改,避免出现未知错误。
音视频开发
实时预览开发
SDK 初始化时,将默认创建 10 秒音视频数据缓存,您将设备采集到的音视频数据送入 ringbuffer 即可。SDK 库文件已实现数据发送,您无需再做对应开发。
开发相关函数
-
确认
TUYA_IPC_SDK_START函数中视频参数信息:GOP 推荐:FPS 参数的 2-3 倍,码率上限 1.5Mbit/s,分辨率推荐 16:9,支持 H264 和 H265 编码格式。
//主码流信息配置,可根据需要修改参数 ipc_sdk_run_var.media_info.media_info.channel_enable[E_IPC_STREAM_VIDEO_MAIN] = TRUE; /* 是否启用本地高清视频流 */ ipc_sdk_run_var.media_info.media_info.video_fps[E_IPC_STREAM_VIDEO_MAIN] = 30; /* FPS */ ipc_sdk_run_var.media_info.media_info.video_gop[E_CHANNEL_VIDEO_MAIN] = 30; /* GOP */ ipc_sdk_run_var.media_info.media_info.video_bitrate[E_CHANNEL_VIDEO_MAIN] = TUYA_VIDEO_BITRATE_1M; /*速率限制*/ ipc_sdk_run_var.media_info.media_info.video_width[E_CHANNEL_VIDEO_MAIN] = 640; /* 单帧宽度分辨率 */ ipc_sdk_run_var.media_info.media_info.video_height[E_CHANNEL_VIDEO_MAIN] = 360; /* 单帧高度分辨率 */ ipc_sdk_run_var.media_info.media_info.video_freq[E_CHANNEL_VIDEO_MAIN] = 90000; /* 时钟频率 */ ipc_sdk_run_var.media_info.media_info.video_codec[E_CHANNEL_VIDEO_MAIN] = TUYA_CODEC_VIDEO_H264; /* 编码格式 *///子码流信息配置,可根据需要修改参数 ipc_sdk_run_var.media_info.media_info.channel_enable[E_IPC_STREAM_VIDEO_SUB] = TRUE; /* 是否启用本地高清视频流 */ ipc_sdk_run_var.media_info.media_info.video_fps[E_IPC_STREAM_VIDEO_SUB] = 30; /* FPS */ ipc_sdk_run_var.media_info.media_info.video_gop[E_IPC_STREAM_VIDEO_SUB] = 30; /* GOP */ ipc_sdk_run_var.media_info.media_info.video_bitrate[E_IPC_STREAM_VIDEO_SUB] = TUYA_VIDEO_BITRATE_512K; /*速率限制*/ ipc_sdk_run_var.media_info.media_info.video_width[E_IPC_STREAM_VIDEO_SUB] = 640; /* 单帧宽度分辨率 */ ipc_sdk_run_var.media_info.media_info.video_height[E_IPC_STREAM_VIDEO_SUB] = 360; /* 单帧高度分辨率 */ ipc_sdk_run_var.media_info.media_info.video_freq[E_IPC_STREAM_VIDEO_SUB] = 90000; /* 时钟频率 */ ipc_sdk_run_var.media_info.media_info.video_codec[E_IPC_STREAM_VIDEO_SUB] = TUYA_CODEC_VIDEO_H264; /* 编码格式 */ -
确认
TUYA_IPC_SDK_START函数中音频参数信息:音频支持 PCM、G711U 和 G711A 格式,上传最大长度:1400 字节,支持 8K 和 16K 音频,App 下发音频长度固定为:320 字节。
ipc_sdk_run_var.media_info.media_info.channel_enable[E_IPC_STREAM_AUDIO_MAIN] = TRUE; /* 是否启用本地声音采集 */ ipc_sdk_run_var.media_info.media_info.audio_codec[E_IPC_STREAM_AUDIO_MAIN] = TUYA_CODEC_AUDIO_PCM;/* 编码格式 */ ipc_sdk_run_var.media_info.media_info.audio_sample [E_IPC_STREAM_AUDIO_MAIN]= TUYA_AUDIO_SAMPLE_8K;/* 采样率 */ ipc_sdk_run_var.media_info.media_info.audio_databits [E_IPC_STREAM_AUDIO_MAIN]= TUYA_AUDIO_DATABITS_16;/* 位宽 */ ipc_sdk_run_var.media_info.media_info.audio_channel[E_IPC_STREAM_AUDIO_MAIN]= TUYA_AUDIO_CHANNEL_MONO;/* 通道 */ ipc_sdk_run_var.media_info.media_info.audio_fps[E_IPC_STREAM_AUDIO_MAIN] = 25; /* 帧率 */ -
调用
tuya_ipc_ring_buffer_open开启一个新的 session 用于音视频传输,其函数如下:所有关于 ringbuffer 的接口兼容 NVR 和 IPC,IPC 中 device 和 channel 参数一般为 0。
/* 打开一个新的会话进行读/写 [in]device :设备编号(用以多设备) [in]channel:摄像头编号(一个设备可以有多个摄像头,如只有一个摄像头请填写 0) [in]stream:码流类型(主码流,子码流) [in]open_type:session 的 ringbuffer 的类型 */ Ring_Buffer_User_Handle_S tuya_ipc_ring_buffer_open(INT_T device, INT_T channel, IPC_STREAM_E stream, RBUF_OPEN_TYPE_E open_type); -
将摄像机采集到的音视频数据通过函数:
TUYA_APP_Put_Frame传入 ringbuffer 中,函数如下所示:/* 将音频和视频的原始数据发送到 SDK [in] handle:对应 tuya_ipc_ring_buffer_open 返回的 handle [in] p_frame:需要传输的音视频帧 */ OPERATE_RET TUYA_APP_Put_Frame(Ring_Buffer_User_Handle_S handle,IN CONST MEDIA_FRAME_S *p_frame); -
您需在
TUYA_APP_Enable_Speaker_CB函数中自行实现喇叭的开关控制,函数如下所示:VOID TUYA_APP_Enable_Speaker_CB(BOOL_T enabled) { printf("enable speaker %d \r\n", enabled); //TODO /* 开发人员需要打开或关闭扬声器硬件操作。 如果 IPC 硬件功能不需要显式打开,则该功能可以留为空白。*/ } -
在
TUYA_APP_Rev_Audio_CB函数中实现音频数据的播放操作,函数如下所示:VOID TUYA_APP_Rev_Audio_CB(IN CONST MEDIA_FRAME_S *p_audio_frame, TUYA_AUDIO_SAMPLE_E audio_sample, TUYA_AUDIO_DATABITS_E audio_databits, TUYA_AUDIO_CHANNEL_E audio_channel) { printf("rev audio cb len:%u sample:%d db:%d channel:%d\r\n", p_audio_frame->size, audio_sample, audio_databits, audio_channel); //PCM-Format 8K 16Bit MONO //TODO /*开发人员需要实现语音播放的操作 */ } -
App 默认下发 G711U 格式音频,设备端如需以 PCM 格式播放,需要调用函数:
tuya_g711_decode对下发的音频做转码处理,函数如下所示:函数参数:
- 1:
TUYA_G711_MU_LAW - 2:被解析数据的地址
- 3:被解析数据的长度
- 4:数据解析后输出的地址
- 5:数据解析后的长度
int tuya_g711_decode(unsigned char type, unsigned short *src, unsigned int srcLen, unsigned char *drc, unsigned int *pOut); - 1:
示例开发流程
-
在
TUYA_IPC_SDK_START中配置视频主码流、子码流和音频参数信息。 -
在主函数中开启音视频线程(两个线程)。
pthread_t h264_output_thread; pthread_create(&h264_output_thread, NULL, thread_live_video, NULL); pthread_detach(h264_output_thread); pthread_t pcm_output_thread; pthread_create(&pcm_output_thread, NULL, thread_live_audio, NULL); pthread_detach(pcm_output_thread); -
分别在音视频线程中,调用
tuya_ipc_ring_buffer_open函数,开启新的 session。 -
在线程函数中采集事先准备的音视频文件的信息,调用
TUYA_APP_Put_Frame将采集到的视频帧传输至 ringbuffer 中。您根据实际需求,将此步骤替换为对摄像头采集的音频信息传入 ringbuffer。
-
P2P 线程将会自动将 ringbuffer 中的数据传输给 App。
本地录像开发
涂鸦 SDK 库文件已集成本地存储功能,您仅需要将音视频送入 ringbuffer,且完成本地存储的设置。
因此,本节将主要介绍如何开发本地存储录像的开启与设置。
开发相关函数
-
在
TUYA_IPC_SDK_START函数中开启本地存储功能,设定相关参数:ipc_sdk_run_var.local_storage_info.enable = 1;//1 代表开启,0 代表关闭连续存储开启后,无需做其他操作,SDK 自动将录像保存至 SD 卡,设备启动后,本地存储初始化仅需要调用一次。本地存储仅支持 SD 卡使用 FAT32 格式。若检测到 SD 卡格式异常,可以通过 DP 上报 SD 卡格式异常信息。用户在 App 单击 SD 卡设置时,会有弹窗提醒 SD 卡异常,引导客户对 SD 卡进行格式化。
-
若已开启事件存储,当设备需要进行录像时,调用函数:
tuya_ipc_start_storage开启录像,调用:tuya_ipc_stop_storage关闭录像,模式选择E_ALARM_SD_STORAGE(本地存储)。单个事件录像最长时间 10 分钟,超过 10 分钟若没有调用
tuya_ipc_stop_storage,则 SDK 会自动关闭录像。/** * \fn OPERATE_RET tuya_ipc_start_storage * \brief 开始存储 * \param[in] storage_type: 存储类型 * \存储类型分为 E_ALARM_SD_STORAGE(本地存储)和 E_ALARM_CLOUD_STORAGE(云存储) * \return 如果开始存储成功返回 OPRT_OK,其他情况则是失败 */ OPERATE_RET tuya_ipc_start_storage(INT_T storage_type);/** * \fn OPERATE_RET tuya_ipc_stop_storage * \brief 停止存储 * \param[in] storage_type: 存储类型 * \存储类型分为 E_ALARM_SD_STORAGE(本地存储)和 E_ALARM_CLOUD_STORAGE(云存储) * \return 如果停止存储成功返回 OPRT_OK,其他情况则是失败; */ OPERATE_RET tuya_ipc_stop_storage(INT_T storage_type); -
按照实际情况,在
tuya_ipc_sd_get_status函数中实现 SD 卡的检测,函数如下所示:当检测 SD 卡格式异常,例如:NTFS 格式的 SD 卡时,返回 abnormal 状态,其余都返回 normal 状态。
E_SD_STATUS tuya_ipc_sd_get_status(VOID) { //todo 您自行实现接口 }为防止丢失录像等数据,请在系统重启或休眠之前调用
sync();系统接口,确保可以将缓存中的数据全部写入本地存储。
示例开发流程
-
在主函数中开启本地存储,设置本地存储相关参数:
ipc_sdk_run_var.local_storage_info.enable = 1;//1 代表开启,0 代表关闭 ipc_sdk_run_var.local_storage_info.max_event_num_per_day = 500;//每天最大事件存储数 ipc_sdk_run_var.local_storage_info.skills = 0;//0 表示开启全部功能 ipc_sdk_run_var.local_storage_info.sd_status_cb = tuya_ipc_sd_status_upload ;//SD 卡状态更新 strcpy(ipc_sdk_run_var.local_storage_info.storage_path, IPC_APP_SD_BASE_PATH);//设置本地存储路径 -
在主函数中调用
TUYA_IPC_SDK_START函数开始 SDK 开发。 -
SDK 中的
tuya_ipc_sdk_mqtt_online_proc函数若判断本地存储已开启,将会调用tuya_ipc_ss_init函数。tuya_ipc_ss_init函数集成了本地存储初始化、SD 卡状态检测、存储线程开启等一系列功能。
功能点开发
DP 主要用以控制设备的各项功能,您需要根据服务器下发的 DP 与 DP 值,设置设备并将设置后的状态上报服务器。tuya_ipc_dp_utils.h 文件对通用 DP 进行了具体说明。您可以根据已有 demo 代码来进行开发与设置。若有定制化 DP 加入,则仿照已有的相同数据类型的 DP 代码,进行添加与设置即可。
目前,DP 参数类型有 5 种:布尔型(BOOL)、值型(VALUE)、字符串型(STR)、枚举型(ENUM)、BITMAP 型(作为预留暂不使用),分别适应不同 DP 参数的设置。具体参见结构体 TY_OBJ_DP_VALUE_U。
DP 数据保存与读取
您可根据实际需求,决定是否保存与读取 DP 数据。
-
需要在以下两个函数:
__tuya_app_write_INT与__tuya_app_write_STR中实现 DP 数据保存的具体操作,函数如下所示:/* 设置保存 DP 本地配置数据。 这里的参考代码直接写到 tmp 中,如需要您可自行替换路径。 注意:替换的路径请与 DP 数据的读取路径保持一致。*/ STATIC VOID __tuya_app_write_INT(CHAR_T *key, INT_T value) { //TODO CHAR_T tmp_cmd[128] = {0}; snprintf(tmp_cmd, 128, "mkdir -p /tmp/tuya.cfgs/;echo %d > /tmp/tuya.cfgs/%s", value, key); printf("write int exc: %s \r\n", tmp_cmd); system(tmp_cmd); } STATIC VOID __tuya_app_write_STR(CHAR_T *key, CHAR_T *value) { //TODO CHAR_T tmp_cmd[256] = {0}; snprintf(tmp_cmd, 256, "echo %s > /tmp/tuya.cfgs/%s", value, key); printf("write STR exc: %s \r\n", tmp_cmd); system(tmp_cmd); } -
您需要在以下两个函数:
__tuya_app_read_INT与__tuya_app_read_STR中实现 DP 数据读取的具体操作。具体函数请参考 demo 程序,部分函数如下所示:/* 读取 DP 本地配置数据,如需要您可自行替换路径。 注意:替换的路径请与 DP 数据的保存路径保持一致。*/ STATIC INT_T __tuya_app_read_INT(CHAR_T *key) { //TODO CHAR_T tmp_file[64] = {0}; snprintf(tmp_file, 64, "cat /tmp/tuya.cfgs/%s", key); printf("read int exc: %s \r\n", tmp_file); FILE *p_file = popen(tmp_file, "r"); STATIC INT_T __tuya_app_read_STR(CHAR_T *key, CHAR_T *value, INT_T value_size) { //TODO memset(value, 0, value_size); CHAR_T tmp_file[64] = {0}; snprintf(tmp_file, 64, "cat /tmp/tuya.cfgs/%s", key); printf("read str exc: %s \r\n", tmp_file); FILE *p_file = popen(tmp_file, "r"); }
OSD 水印功能开发
-
OSD 水印 DP:104
-
根据服务器下发的 DP 值,给视频加上或取消时间水印,水印位置与内容由设备端控制。
示例开发流程
-
在
tuya_ipc_dp_utils.h中加入:#define TUYA_DP_WATERMARK 104 -
在
tuya_ipc_dp_utils.c的s_dp_table[]中加入:#ifdef TUYA_DP_WATERMARK {TUYA_DP_WATERMARK, handle_DP_WATERMARK}, #endifhandle_DP_WATERMARK为此功能 DP 数据处理函数。您可自行开发,其 demo 函数如下:#ifdef TUYA_DP_WATERMARK STATIC VOID handle_DP_WATERMARK(IN TY_OBJ_DP_S *p_obj_dp) { BOOL_T watermark_on_off = check_dp_bool_invalid(p_obj_dp); IPC_APP_set_watermark_onoff(watermark_on_off); watermark_on_off = IPC_APP_get_watermark_onoff(); respone_dp_bool(TUYA_DP_WATERMARK, watermark_on_off); } #endif -
在主函数中调用
IPC_APP_handle_dp_cmd_objs函数,对接收到的服务器下发的 DP 数据进行处理,判断是否触发此 DP 对应的功能函数(TUYA_IPC_SDK_START函数中已调用此函数)。
移动侦测开发
SDK 提供了控制移动侦测功能开关控制、灵敏度控制、定时控制、间歇控制以及数据上报的函数,您可以调用 SDK API 接口完成功能移动侦测以及移动追踪功能的开发。
开发相关函数
- 移动侦测开关DP:134
- 移动侦测灵敏度DP:106
开启步骤参照 OSD 水印功能开发。
-
调用函数:
Tuya_Ipc_Motion_Init,进行移动侦测功能初始化,函数如下所示:/********************************************************************************* * Init input config. **********************************************************************************/ OPERATE_RET Tuya_Ipc_Motion_Init(TUYA_MOTION_TRACKING_CFG mt_cfg);初始化参数结构体
TUYA_MOTION_TRACKING_CFG信息说明如下所示:typedef struct _TUYA_MOTION_TRACKING_CFG { INT_T frame_w; //视频宽度 INT_T frame_h; //视频长度 INT_T y_thd; //移动侦测评判阈值,默认 30,阈值范围推荐 540:范围 1255,值越小,越灵敏 INT_T sensitivity; //移动侦测灵敏度,设置 1-7,值越大,越灵敏 TUYA_RPERCENT_ECT roi; //移动侦测区域设置,设置参考 TUYA_RECT 结构体 TUYA_MULTI_MD_REGION motion_region;//多区域移动侦测设置,范围为 1*1 到 5*5 INT_T tracking_enable; //运动跟踪开关,只开移动侦测设置为:0,开启运动跟踪设置为:1 }TUYA_MOTION_TRACKING_CFG;初始化参数结构体
_TUYA_AI_RECT说明下所示:typedef struct _TUYA_AI_RECT { INT_T left; //区域坐标的 x 值占 x 轴的百分比(值需要取整),例:x 坐标点为 128,10% INT_T top; //区域坐标的 y 值占 y 轴的百分比(值需要取整),例:y 坐标点为 72,10% INT_T right; //移动侦测区域长度所占 x 轴的百分比(值需要取整),例:x 方向长度为 256,20% INT_T bottom; //移动侦测区域长度所占 y 轴的百分比(值需要取整),例:y 方向长度为 144,20% }TUYA_AI_RECT;结构体
TUYA_AI_RECT,结合以上说明,图例示意如下所示: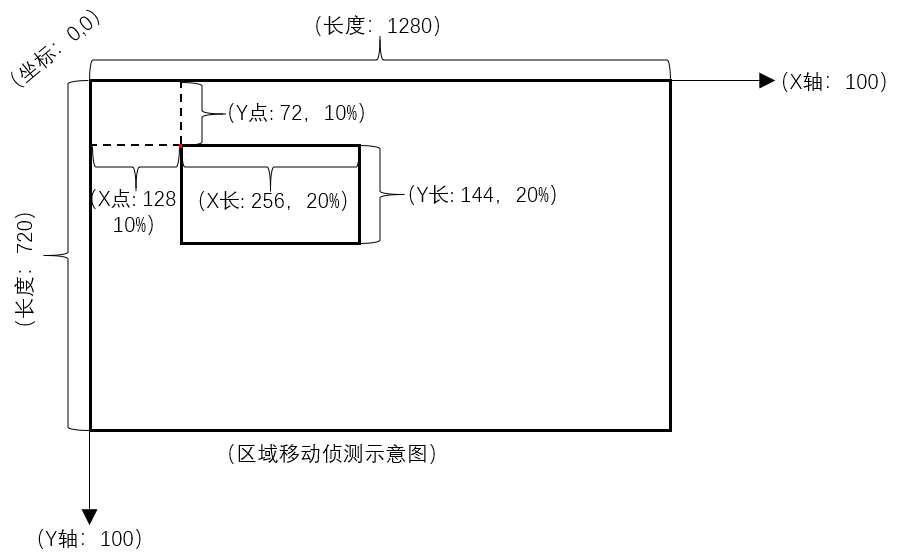
-
初始化函数:
Tuya_Ipc_Motion_Init调用后,如需修改移动侦测的参数,调用函数:Tuya_Ipc_Set_Motion进行修改,函数如下所示:/********************************************************************************* * Set config dynamically. **********************************************************************************/ OPERATE_RET Tuya_Ipc_Set_Motion(TUYA_MOTION_TRACKING_CFG mt_cfg);获取移动侦测的参数函数:
Tuya_Ipc_Get_Motion,函数如下所示:/********************************************************************************* * Get config dynamically. **********************************************************************************/ void Tuya_Ipc_Get_Motion(TUYA_MOTION_TRACKING_CFG *mt_cfg); -
设备每隔一段时间调用接口
Tuya_Ipc_Motion,将采集到的 YUV 数据传入。当 SDK 判断两张图片间存在差异,需要触发移动报警,则返回值 1,若无,则返回值 0。函数如下所示:传入的图片信息必须是:YUV420 格式,移动追踪功能调优,建议取 5 次移动追踪判断结果的平均值作为舵机转动的目标角度,减少设备追踪不上事物移动的情况。
函数:
Tuya_Ipc_Motion调用的频率由设备测试调优的实际需求而定。- 参数 1:传入图片信息。
- 参数 2:返回 1,则移动侦测触发成功。
- 参数 3:若打开了移动追踪功能,则输出物体移动后以图像中心为中心轴坐标系的物体的(x,y)角度。
/********************************************************************************* * Execute Motion Detect \ Motion Tracking. * in_data 输入格式为 YUV420 * motion_flag 返回运动检测的值。 0 表示不移动,1 表示存在移动对象。 * motion_point 返回最大移动物体的中心点角度坐标。 两个值(x,y)均为 0,表示不移动,否则表示移动。 当 tracking_enable == 0 时返回(0,0) **********************************************************************************/ OPERATE_RET Tuya_Ipc_Motion(UCHAR_T *in_data, INT_T *motion_flag, TUYA_POINT * motion_point);若函数:
Tuya_Ipc_Motion判断两张图片间的差异需要触发移动侦测,则输出物体移动后以图像中心为中心轴坐标系的物体的(x,y)角度,图例示意如下所示:x 为以 IPC 为中心、物体移动前后水平方向上产生的夹角,y 为以 IPC 为中心、物体移动前后垂直方向上产生的夹角。您可以根据(x,y)角度计算出舵机转向的角度并控制舵机转动,实现移动追踪功能。
-
当画面有变化时,调用函数:
tuya_ipc_notify_alarm上报图片,函数如下所示:/** * \fn OPERATE_RET tuya_ipc_notify_alarm * \将可编辑的警报发送到云服务和 App * \param[in] snap_buffer: 当前快照的地址 * \param[in] snap_size: 快照的大小,以字节为单位 * \param[in] name: 可修改的事件类型, NOTIFICATION_NAME_E * \param[in] is_notify: 如果为 TRUE,同时上报至消息中心和云存储事件列表。如果为 false,只上报到云存储事件列表,不上报到消息中心。 * \return OPERATE_RET */ OPERATE_RET tuya_ipc_notify_alarm(CONST CHAR_T *snap_buffer, CONST UINT_T snap_size, CONST NOTIFICATION_NAME_E name, BOOL_T is_notify); -
若在 OTA 过程中需要优化内存资源,可调用函数:
Tuya_Ipc_Motion_Release退出移动侦测以及移动追踪功能,函数如下所示:void Tuya_Ipc_Motion_Release();
示例开发流程
具体操作,可参考 demo 代码中 thread_md_proc 函数。
-
开启移动侦测功能(定义 DP)。
-
开启移动侦测线程,如下所示:
pthread_create(&motion_detect_thread, NULL, thread_md_proc, NULL); -
在移动侦测线程函数中,调用时间同步函数来同步当前时间。
//获取 UTC 时间 OPERATE_RET tuya_ipc_get_utc_time(OUT TIME_T *time_utc); -
在移动侦测线程函数中,调用移动判断函数
get_motion_status判断对象是否发生移动。您可根据不同的芯片平台在此函数自行实现对移动判断的功能,可调用上述 SDK 提供的
Tuya_Ipc_Motion等相关函数进行开发。int fake_md_status = 0; int get_motion_status() { //if motion detected, return 1 //else return 0 返回值存储在 fake_md_status 参数中 return fake_md_status; } -
如果发生移动,则调用
tuya_ipc_start_storage函数开启本地存储和云存储功能,之后调用get_motion_snapshot函数抓取当前图像,相关函数如下:tuya_ipc_start_storage(E_ALARM_SD_STORAGE); //开启本地存储 tuya_ipc_start_storage(E_ALARM_CLOUD_STORAGE); //开启云存储//您可根据不同的芯片平台自行开发抓图函数 void get_motion_snapshot(char *snap_addr, int *snap_size) { //we use file to simulate char snapfile[128]; *snap_size = 0; extern char s_raw_path[]; printf("get one motion snapshot\n"); snprintf(snapfile,64,"%s/resource/media/demo_snapshot.jpg",s_raw_path); FILE*fp = fopen(snapfile,"r+"); //... } -
调用
tuya_ipc_notify_alarm函数发送报警信号至云端:/** * \fn OPERATE_RET tuya_ipc_notify_alarm * \将可编辑的警报发送到云服务和 App * \param[in] snap_buffer: 当前快照的地址 * \param[in] snap_size: 快照的大小,以字节为单位 * \param[in] name: 可修改的事件类型, NOTIFICATION_NAME_E * \param[in] is_notify: 如果为 TRUE,同时上报至消息中心和云存储事件列表。如果为 false,只上报到云存储事件列表,不上报到消息中心。 * \return OPERATE_RET */ OPERATE_RET tuya_ipc_notify_alarm(CONST CHAR_T *snap_buffer, CONST UINT_T snap_size, CONST NOTIFICATION_NAME_E name, BOOL_T is_notify); -
若检测对象不发生移动,且距离上次移动侦测事件时间超过 10 秒,则调用
tuya_ipc_stop_storage停止本地存储和云存储。tuya_ipc_stop_storage(E_ALARM_SD_STORAGE); //停止本地存储 tuya_ipc_stop_storage(E_ALARM_CLOUD_STORAGE); //停止云存储
图像缩放开发(SDK 集成)
图像缩放功能目的在于调整图像的分辨率,将采集到的图像调整至需要的目标分辨率。
图像缩放开发流程
-
调用函数:
Tuya_Ipc_Img_Resize,传入图片信息、参数信息和图片输出的地址信息,函数如下所示:参数 1:传入图片地址,参数 2:传入图片参数信息,参数 3:图片输出地址。传入图片信息必须是:YUV420 格式。
/********************************************************************************* * YUV420 image scale interface * in_data 输入图片,格式为 YUV420 * paras 规模结构 * out_data 输出图片,格式为 YUV420 **********************************************************************************/ OPERATE_RET Tuya_Ipc_Img_Resize(UCHAR_T *in_data, TUYA_IMG_RESIZE_PARA paras, UCHAR_T *out_data); -
结构体
TUYA_IMG_RESIZE_PARA说明如下所示:typedef struct _TUYA_IMG_RESIZE_PARA { INT_T srcWidth; //传入图像的宽度 INT_T srcHeight; //传入图像的高度 INT_T dstWidth; //输出图像的宽度 INT_T dstHeight; //输出图像的高度 IMG_TYPE img_type; //缩放方式 IMG_RESIZE_TYPE resize_type; }TUYA_IMG_RESIZE_PARA; -
选择加密方式结构体
IMG_RESIZE_TYPE说明如下所示:typedef enum { LINEAR, //速度快但质量较低 CUBIC, //速度较慢但质量高 }IMG_RESIZE_TYPE;
PTZ 摇头机功能开发
摇头机开始转动 DP 为 119,停止转动 DP 为 116。
#define TUYA_DP_PTZ_CONTROL 119
/* PTZ 旋转控制,枚举类型,0 向上,1 右上,2 右,3 右下,4 向下,5 左下,6 左,7 左上
* 但在 4.0 SDK 中为 0-右上,1-右,2-下右,3-下,4-左下,5-左,6-左上,7-上
*/
#define TUYA_DP_PTZ_STOP 116 /* PTZ 旋转停止,BOOL 型*/
设备接收到服务端 DP 的控制指令后,控制 PTZ 摇头机转动。119 DP下发的常见格式为:
{"range":["1","2","3","4","5","6","7","0"],"type":"enum"}
PTZ 摇头机通用控制开发
- 云台 DP 控制说明如下表所示。根据服务器下发的 DP 值控制设备方向。控制逻辑:接收到 119 转动方向 DP 后,开始转动,直到接收到 116 停止转动 DP,停止舵机转动。
| 摇头机 DP | DP 说明 |
|---|---|
| 119 | 云台转动控制。0-右上,1-右,2-右下,3-下,4-左下,5-左,6-左上,7-上。 |
| 116 | 云台转动停止,bool 类型。 |
| 161 | 移动跟踪使能开关,bool 类型。true 开启,false 不开启。 |
| 178 | 收藏点操作,string 型。type:1 添加,type:2 删除。不同类型跟的数据串不同。 |
-
您可以在
handle_DP_PTZ_CONTROL函数中自行开发摇头机开始转动的相关控制,在handle_DP_PTZ_STOP函数中开发停止转动相关控制,函数如下:STATIC VOID handle_DP_PTZ_CONTROL(IN TY_OBJ_DP_S *p_obj_dp) { if( (p_obj_dp == NULL) || (p_obj_dp->type != PROP_ENUM) ) { printf("Error!! type invalid %d \r\n", p_obj_dp->type); return; } //dp 119 format: {"range":["1","2","3","4","5","6","7","0"],"type":"enum"} UINT_T dp_directions[8] = {1,2,3,4,5,6,7,0}; UINT_T direction = dp_directions[p_obj_dp->value.dp_enum]; }#ifdef TUYA_DP_PTZ_STOP STATIC VOID handle_DP_PTZ_STOP(IN TY_OBJ_DP_S *p_obj_dp) { IPC_APP_ptz_stop_move(); respone_dp_bool(TUYA_DP_PTZ_STOP, TRUE); } #endif
示例开发流程:
-
开启 PTZ 控制功能,在
tuya_ipc_dp_utils.h定义相关 DP。例如:#define TUYA_DP_PTZ_CONTROL 119 /* PTZ旋转控制,枚举类型*/ #define TUYA_DP_PTZ_STOP 116 /* PTZ旋转停止,BOOL型*/ -
在
tuya_ipc_dp_utils.c的s_dp_table[]中加入:#ifdef TUYA_DP_PTZ_CONTROL {TUYA_DP_PTZ_CONTROL, handle_DP_PTZ_CONTROL}, #endif #ifdef TUYA_DP_PTZ_STOP {TUYA_DP_PTZ_STOP, handle_DP_PTZ_STOP}, #endifhandle_DP_PTZ_CONTROL函数和handle_DP_PTZ_STOP函数为对应 DP 操作函数。您需自行在函数中开发摇头机的运动和停止功能,示例函数如下:#ifdef TUYA_DP_PTZ_CONTROL STATIC VOID handle_DP_PTZ_CONTROL(IN TY_OBJ_DP_S *p_obj_dp) { if( (p_obj_dp == NULL) || (p_obj_dp->type != PROP_ENUM) ) { printf("Error!! type invalid %d \r\n", p_obj_dp->type); return; } //dp 119 format: {"range":["1","2","3","4","5","6","7","0"],"type":"enum"} UINT_T dp_directions[8] = {1,2,3,4,5,6,7,0}; UINT_T direction = dp_directions[p_obj_dp->value.dp_enum]; CHAR_T tmp_str[2] = {0}; snprintf(tmp_str,2,"%d",direction); IPC_APP_ptz_start_move(tmp_str); respone_dp_enum(TUYA_DP_PTZ_CONTROL,tmp_str); } #endif -
在主函数中调用
IPC_APP_handle_dp_cmd_objs函数对接收到的服务器下发的 DP 数据进行处理,判断是否触发此 DP 对应的功能函数(TUYA_IPC_SDK_START函数中已调用此函数)。
PTZ 摇头机预设位控制开发
预设位控制功能 DP:178
#define TUYA_DP_PRESET_SET 178 /* 收藏点操作,string 型,type:1 添加,type:2 删除,不同类型的数据串不同 */
开发相关函数
-
预设备添加收藏点前,需要上报 179 DP,eum:2 非巡航模式
-
设备接收到服务器下发的 DP 数据,增加预设点函数:
tuya_ipc_preset_add。具体如下所示:/** * \fn OPERATE_RET tuya_ipc_preset_add(S_PRESET_POSITION* preset_pos) * \brief 添加一个预设点 * \param[in] 输入预设位置 * \return OPERATE_RET */ OPERATE_RET tuya_ipc_preset_add(S_PRESET_POSITION* preset_pos); -
S_PRESET_POSITION结构体id[32]:服务器下发的 ID 值,可以不做处理。name[32]:增加收藏点时,name[32]下发收藏点名字,可以做对应存储。mpId:设备增加对应收藏点后,需要填入收藏点的序号,从 1 开始。ptz:填入设备收藏点的具体 p 与 t 坐标,若是定焦设备,z 坐标值为 0。
typedef struct { CHAR_T id[32]; //服务器的 ID CHAR_T name[32]; //收藏点名称 INT_T mpId; //索引 ID S_PRESET_PTZ ptz; //PTZ 的预设位置 } S_PRESET_POSITION; typedef struct { INT_T pan; //横向 INT_T tilt; //竖直 INT_T zoom; //定焦设备该值为 0 }S_PRESET_PTZ; -
调用
tuya_ipc_preset_add_pic函数,传入图片地址以及图片大小,函数如下所示:/* \fn OPERATE_RET tuya_ipc_preset_add_pic(CHAR_T *addr, UINT_T size) \brief 上传当前预设位置的快照 \param[in] addr/size: 要上传图片的地址和大小 \return OPERATE_RET */ OPERATE_RET tuya_ipc_preset_add_pic(CHAR_T *addr, UINT_T size); -
设备上电后,调用接口:
tuya_ipc_preset_get与服务器同步已存在的预设位收藏点信息。/* \fn OPERATE_RET tuya_ipc_preset_get(S_PRESET_CFG *preset_cfg) \brief 获取存储在图雅云中的所有预设位置 \param[in out] preset_cfg \return OPERATE_RET */ OPERATE_RET tuya_ipc_preset_get(S_PRESET_CFG *preset_cfg); -
服务器下发删除预设位指令,设备端删除相关信息后,调用函数:
tuya_ipc_preset_del,回传服务器下发的 ID 值://删除预设位,error 需要 0 与 1 交替 if(tmp == 0) { tmp = 1; } else if(tmp == 1) { tmp = 0; } tuya_ipc_preset_del(devId->valuestring); snprintf(respond_del,128,"{\"type\":%d,\"data\":{\"error\":%d}}",type->valueint,tmp);
示例开发流程
-
开启 PTZ 预设点功能(在
tuya_ipc_dp_utils.h定义相关 DP),如:#define TUYA_DP_PRESET_SET 178 /*收藏点操作,string 型,type:1 添加,type:2 删除,不同类型的数据串不同*/ -
在
tuya_ipc_dp_utils.c的s_dp_table[]中加入:#ifdef TUYA_DP_PRESET_SET {TUYA_DP_PRESET_SET, handle_DP_SET_PRESET}, #endif -
在
handle_DP_SET_PRESET函数的IPC_APP_set_preset函数中,判断对预设点的操作类型(1:增加预置点,2:删除预置点,3:预置点调用)。根据判断的操作类型,分别调用预设点添加函数tuya_ipc_preset_add、预设点图像上传函数tuya_ipc_preset_add_pic、预设点删除函数tuya_ipc_preset_del、预设点调用函数tuya_ipc_preset_go(此功能您可自行实现),实现预设点的添加、删除、调用功能。示例函数如下:调用预设点添加函数
tuya_ipc_preset_add之前,需先获取 PTZ 当前位置信息。/*1:增加预置点,2:删除预置点,3:预置点调用*/ if(type->valueint == 1) { tuya_ipc_preset_add(data); } else if(type->valueint == 2) { tuya_ipc_preset_del(data); } else if(type->valueint == 3) { tuya_ipc_preset_go(data); } -
在主函数中调用
IPC_APP_handle_dp_cmd_objs函数,对接收到服务器下发的 DP 数据进行处理,判断是否触发此 DP 对应的功能函数(TUYA_IPC_SDK_START函数中已调用此函数)。
日志上报后台开发
- 设备端开发涂鸦 SDK,禁止连接第三方或私有服务器,否则存在不符合海外法规风险。
- 设备上报日志到云端,触发动作需要得到用户许可。
- 设备端 DNS 必须设定为自动获取,否则存在设备联网异常风险。
-
调用函数:
tuya_ipc_set_log_attr控制日志输出,SDK 默认日志输出级别:4。设置数值越少,日志输出则越少。trace 级别:5。函数调用位置如下所示:OPERATE_RET tuya_ipc_sdk_start(IN CONST TUYA_IPC_SDK_RUN_VAR_S * pRunInfo) { //... s_ipc_sdk_run_handler.sdk_run_info = *pRunInfo; //TODO loglevel tuya_ipc_set_log_attr(pRunInfo->debug_info.log_level,NULL); //... }外部日志上报云端的需求可以通过
cloud_operation_set_log_path_cb进行注册,注册完成后,SDK 内部可以将该数据传到云端,可以自行管理文件。回调需要设定路径和文件大小。typedef VOID (*GW_APP_LOG_PATH_CB)(OUT CHAR_T *path, IN CONST INT_T len); VOID cloud_operation_set_log_path_cb(GW_APP_LOG_PATH_CB cb) { s_log_cb = cb; }
门铃功能开发
本章节主要介绍门铃产品特性功能的开发,可以实现当门铃被按下时向APP推送提醒、进行视频通话、留言等功能
开发相关函数
-
调用
TUYA_APP_Enable_DOORBELL进行门铃初始化。 -
调用
ty_timer_create函数进行定时器创建,函数如下://用户需要根据不同的芯片平台,实现此定时器接口 static int ty_timer_create(TIMER_CB cb, timer_t *p_timer_id) { struct sigevent evp; memset(&evp, 0, sizeof(struct sigevent)); evp.sigev_notify = SIGEV_THREAD; evp.sigev_notify_function = cb; if(timer_create(CLOCK_REALTIME, &evp, p_timer_id) == -1) { printf(" fail to timer create\n"); return -1; } return 0; } -
若门铃被按下,则调用
get_snapshot抓取当前图片,用于后续消息报警,函数如下://此示例函数中用预设的图片作为抓取的图像,用户需要根据不同的芯片平台,自行实现对当前图像的抓取 void get_snapshot(char *snap_addr, int *snap_size) { //we use file to simulate char snapfile[128]; *snap_size = 0; extern char s_raw_path[]; printf("get one motion snapshot\n"); } -
抓取到图像后,调用
tuya_ipc_door_bell_press将图像信息推送给涂鸦开发者平台和App,函数如下:/** * \fn OPERATE_RET tuya_ipc_door_bell_press * \brief 发送一个门铃按下消息给涂鸦开发者平台和 APP * \param[in] doorbell_type: 门铃类型。DOORBELL_NORMAL 为普通门铃,推送图像 DOORBELL_AC 为直供电门铃,推送 P2P * \param[in] snap_buffer: snapshot 抓取的图像地址 * \param[in] snap_size: 抓取图像的大小 * \param[in] type: 抓取图像文件类型,jpeg 或者 png * \return OPERATE_RET */ OPERATE_RET tuya_ipc_door_bell_press(IN CONST DOORBELL_TYPE_E doorbell_type, IN CONST CHAR_T *snap_buffer, IN CONST UINT_T snap_size, IN CONST NOTIFICATION_CONTENT_TYPE_E type);若要实现门铃留言功能,则调用
tuya_ipc_leave_video_msg函数开始留言,函数如下:/** * \fn OPERATE_RET tuya_ipc_leave_video_msg * \brief 从现在开始留言 * \param[in] extra_data 图像的 buffer 地址 * \param[in] data_len buffer 的大小 * \return */ OPERATE_RET tuya_ipc_leave_video_msg(CHAR_T *extra_data, INT_T data_len);
示例开发流程
-
开启门铃功能,设置相关参数:
ipc_sdk_run_var.video_msg_info.enable = 1; //1 为开启,0 为关闭 ipc_sdk_run_var.video_msg_info.type = MSG_BOTH; //支持功能类型,具体参考结构体 MESSAGE_E ipc_sdk_run_var.video_msg_info.msg_duration = 10;//最大持续时间,单位为秒 -
调用
TUYA_IPC_SDK_START开始 SDK 开发,其内部会调用tuya_ipc_video_msg_init函数进行门铃功能初始化。 -
如果门铃被按下,调用
doorbell_handler函数。 -
在
doorbell_handler函数中判断门铃的状态,如果为DOORBELL_LISTEN状态(监听状态),则调用get_snapshot抓取当前图像,并调用tuya_ipc_door_bell_press向涂鸦开发者平台和 App 推送消息。 -
如果为
DOORBELL_RECORD(留言),则调用tuya_ipc_leave_video_msg开始留言。
低功耗休眠和唤醒功能开发
开发相关函数介绍
-
休眠状态 DP:149
149 DP 数值:0 代表设备进入休眠状态,1 代表设备进入唤醒状态。
#define TUYA_DP_DOOR_SLEEP "149" /* 设备休眠开关,BOOL 类型。true 未休眠,false 休眠。 */ -
调用
tuya_ipc_low_power_server_get获取服务器的 IP 和 port,函数如下:/** * \fn OPERATE_RET tuya_ipc_low_power_server_addr_get * \brief 获取低功耗服务器的信息 * \return return 如果获取到 IP 和 port,返回 OPRT_OK,其他则失败 */ OPERATE_RET tuya_ipc_low_power_server_get(OUT UINT_T *ip,OUT UINT_T *port); -
调用
tuya_ipc_device_id_get获取设备 ID,函数如下:/** * \fn OPERATE_RET tuya_ipc_device_id_get * \brief 获取设备 ID * \return return 如果获取到 ID,返回 OPRT_OK,其他则失败 */ OPERATE_RET tuya_ipc_device_id_get(IN OUT CHAR_T *devid, IN OUT INT_T * id_len); -
调用
tuya_ipc_local_key_get获取 local key,函数如下:/** * \fn OPERATE_RET tuya_ipc_local_key_get * \brief 从 IPC 的 SDK 获取 signatrue key * \ make destKeyBuf len >=17; * \return return 获取成功则返回 OPRT_OK */ OPERATE_RET tuya_ipc_local_key_get(OUT CHAR_T * destKeybuf,OUT UINT_T * len); -
调用函数
tuya_ipc_low_power_server_connect连接服务器,函数如下:/** * \fn OPERATE_RET tuya_ipc_lowpower_server_connect * \brief 连接涂鸦低功耗服务器 * \[in] serverIp:服务器 IP 地址 * \[in] port:服务器 port * \[in] pdevId:设备 ID * \[in] idLen:设备 ID 长度 * \[in] pkey:local key * \[in] keyLen:local key 长度 * \return OPERATE_RET 0:success,others:failed */ OPERATE_RET tuya_ipc_low_power_server_connect(UNW_IP_ADDR_T serverIp,INT_T port,CHAR_T* pdevId, INT_T idLen, CHAR_T* pkey, INT_T keyLen); -
通过
tuya_ipc_low_power_socket_fd_get获取对应的 socket fd 信息,函数如下:/** * \fn OPERATE_RET tuya_ipc_low_power_socket_fd_get * \brief 获取涂鸦低功耗保活的 TCP handler * \return OPERATE_RET 0:success,others:failed */ OPERATE_RET tuya_ipc_low_power_socket_fd_get(); -
通过
tuya_ipc_low_power_wakeup_data_get获取 app 唤醒的数据。/** * \fn OPERATE_RET tuya_ipc_lowpower_server_connect * \brief 获取涂鸦低功耗唤醒数据 * \return OPERATE_RET 0:success,others:failed */ OPERATE_RET tuya_ipc_low_power_wakeup_data_get(OUT CHAR_T* pdata, OUT UINT_T* plen); -
通过
tuya_ipc_low_power_heart_beat_get获取心跳包信息:/** * \fn OPERATE_RET tuya_ipc_lowpower_server_connect * \brief 获取心跳包信息 * \return OPERATE_RET 0:success,others:failed */ OPERATE_RET tuya_ipc_low_power_heart_beat_get(OUT CHAR_T * pdata,OUT UINT_T *plen);
示例开发流程
-
若需要开启低功耗,则调用
tuya_ipc_low_power_server_get获取服务器的 IP 地址和 port。 -
调用
tuya_ipc_device_id_get获取设备 ID。 -
调用
tuya_ipc_local_key_get获取 local key。 -
根据以上得到的信息,调用
TUYA_APP_LOW_POWER_START开始低功耗模式。OPERATE_RET TUYA_APP_LOW_POWER_START(char * devbuf,char *keybuf,int ip,int port) -
TUYA_APP_LOW_POWER_START中调用tuya_ipc_low_power_server_connect连接服务器。 -
TUYA_APP_LOW_POWER_START中调用tuya_ipc_low_power_socket_fd_get获取对应的 socket fd,用于后续心跳包发送。 -
TUYA_APP_LOW_POWER_START中调用tuya_ipc_low_power_wakeup_data_get获取 App 唤醒的数据。 -
创建一个循环,不断发送心跳包通知服务声明此设备的存在,并且不断接收唤醒信号等待唤醒。
send(low_power_socket, heart_beat, heart_beat_len, 0);//发送心跳包 -
分析接收到唤醒数据,如果判断需要唤醒设备,则进行启动设备相关操作。
您需要在 TODO 处自行实现启动设备相关操作。
if (FD_ISSET(low_power_socket, &rfds)) { bzero(recBuf, MAXBUF+1); printf("============recv data==============\n"); len = recv(low_power_socket, recBuf, MAXBUF, 0); if (len > 0) { printf("Successfully received the message: is {"); for(i=0;i<len;i++) printf("0x%02x ",recBuf[i]); printf("}\n"); if(strncmp(recBuf,wakeData,wake_data_len)==0) { //TODO 启动 SDK printf("recve data is wake up\n"); } } }
低功耗设备功能启动优化
-
MQTT 上线回调函数:
__IPC_APP_Get_Net_Status_cb可以使用STAT_MQTT_ONLINE判定 MQTT 是否上线成功,成功后可往下执行剩余操作。 -
Wi-Fi 连通外网后,可另起线程,进行 P2P 初始化,提高设备接入外网效率。
-
设备只需检测到 SD 卡挂载成功,即可进行本地录像初始化。SDK 带有时间修复机制,会自动检测并修复时间戳异常的数据。
-
使用本地存储事件录像功能,调用函数:
tuya_ipc_ss_stop_event后,设备需要稍等 2-3 秒,直至录像数据已经保存至 SD 卡再进入休眠。 -
本地存储调用了 event stop 接口后,需要调用
tuya_ipc_ss_get_status获取本地录像的状态,当状态是:E_STORAGE_STOP时,设备再进入休眠。tuya_ipc_ss_get_status接口只能用来获取状态,不能设置状态。 -
使用云存储功能,调用函数
tuya_ipc_cloud_storage_event_delete后,需要调用:tuya_ipc_cloud_storage_get_event_status_by_id查询云存储数据上传的状态,查询状态不为:EVENT_ONGOING或EVENT_READY时,设备才可进入休眠状态,否则容易出现云存储数据丢失的情况,具体说明如下所示:typedef enum { EVENT_NONE, //没有云存储事件发生或云存储事件传输完成 EVENT_ONGOING, //云存储事件正在进行 EVENT_READY, //云存储事件进行的临界点,出现在刚调用 add 接口时 EVENT_INVALID //云存储功能没有初始化成功 }EVENT_STATUS_E; -
云存储可调用接口:
tuya_ipc_cloud_storage_set_pre_record_time设置取预录制的时间,获取更往前的预录制视频数据。 -
提高 P2P 线程、本地存储线程的优先级。提高线程优先级存在一定风险,设备端需要仔细确认其他线程基本功能不受影响。
OTA 功能开发
OTA 作为设备升级与维护的最重要途径之一,将在本章节进行具体介绍。当有固件需要升级时,SDK 将通过回调的形式告知设备,进行 OTA 操作。
OTA 开发流程
-
OTA 请求回调函数:
IPC_APP_Upgrade_Inform_cb(),传入参数包含固件下载的 url(下载链接)以及 size(文件的大小)。 -
释放系统资源(优化内存):调用
tuya_ipc_ss_set_write_mode()函数,关闭本地录像功能,然后调用:tuya_ipc_ss_uninit()、tuya_ipc_tranfser_close()函数,uninit 与 close 函数主要用于 SDK 本地存储与 P2P 功能的反初始化,尽可能释放内存资源。内存资源优化需要在
tuya_ipc_upgrade_sdk函数前进行。VOID IPC_APP_Upgrade_Inform_cb(IN CONST FW_UG_S *fw) { PR_DEBUG("Rev Upgrade Info"); PR_DEBUG("fw->fw_url:%s", fw->fw_url); PR_DEBUG("fw->sw_ver:%s", fw->sw_ver); PR_DEBUG("fw->file_size:%u", fw->file_size); FILE *p_upgrade_fd = fopen(s_mgr_info.upgrade_file_path, "w+b"); //此处优化内存资源 tuya_ipc_upgrade_sdk(fw, __IPC_APP_get_file_data_cb, __IPC_APP_upgrade_notify_cb, p_upgrade_fd); }函数:
tuya_ipc_upgrade_sdk中第一个回调函数__IPC_APP_get_file_data_cb是用于获取文件分片数据(下载)。函数中有入参与出参,入参主要提供给您使用,出参由您获取到数据后,需要返回是否已完成数据的写入,写入成功返回 0。第二个回调函数
__IPC_APP_upgrade_notify_cb是用于显示 OTA 升级整体进度。 -
在函数:
__IPC_APP_upgrade_notify_cb中替换新固件。具体实现参考tuya_ipc_sdk_upgrade_demo.c文件。固件下载完成后,需要客户在函数中实现固件的具体替换过程。替换成功后,需要在此函数内进行设备的重启操作。
固件替换前,需要备份 DB 文件。固件替换成功后,对比 DB 文件替换固件前后的 md5 值,若相同,则可以直接重启。若不相同,则将备份的 DB 文件替换现有的 DB 文件,再重启设备。
VOID __IPC_APP_upgrade_notify_cb(IN CONST FW_UG_S *fw, IN CONST INT_T download_result, IN PVOID_T pri_data) -
若 OTA 升级失败,需要在函数:
__IPC_APP_upgrade_notify_cb中加入重启操作。反初始化的操作不可逆,若 OTA 失败,设备必须进行重启。
OTA 自定义进度上报开发
-
设备端通过 URL 开始下载固件,调用
tuya_ipc_upgrade_progress_report函数,上报 OTA 下载的进度,函数如下所示:上报的进度值建议小于 99%。
/* \fn OPERATE_RET tuya_ipc_upgrade_progress_report \brief 发送升级进度到云服务和 App \param[in] percent: 升级进度百分比,有效值 [0,100] \return SUCCESS – OPERATE_RET , FAIL – COMM ERROR */ OPERATE_RET tuya_ipc_upgrade_progress_report(IN UINT_T percent); -
固件升级时,手机 App 进度显示会暂停在 98%。此时,固件已完成下载,App 正在等待设备重启并上报新固件版本号,版本号上报成功后,App 将显示 升级成功。
-
App 等待设备替换固件与上报新版本号的时间为 1 分钟。若设备流程超过此时间,需要告知项目经理 PID,在后台进行配置。
云存储功能开发
SDK 库文件已集成云存储功能。在购买云存储服务后,SDK 将 ringbuffer 中的音视频信息发送至云端保存,保存时间根据所购买的云存储服务而定。
- SDK 默认对数据采用软件加密的方式,加密接口:
OpensslAES_CBC128_encrypt使用 AES CBC 方式。若软件加密给 MCU 带来较大的负载,可改用硬件加密方式,使用 SoC 硬件加密通道,加密方式:PKCS5/PKCS7,如下表所示:
| 填充类型 | 说明 |
|---|---|
| 不填充 | 有些块加密模式不需要填充,或者明文都是块长度的整数倍。 |
| ISO10126 |
|
| PKCS5/PKCS7 |
|
| OAEP/PKCS1 | 为 RSA 算法提供的。 |
开发流程
-
连续云存储:
-
设定
ipc_sdk_run_var.cloud_storage_info.enable为 1。ipc_sdk_run_var信息参照结构体TUYA_IPC_SDK_RUN_VAR_S,enable数值为 1 代表开启云存储功能,数值为 0 代表关闭云存储功能。 -
您根据开发需要调用
AES_CBC_init、AES_CBC_encrypt、AES_CBC_destory等函数初始化加密方式。ipc_sdk_run_var.aes_hw_info.aes_fun.init = AES_CBC_init; ipc_sdk_run_var.aes_hw_info.aes_fun.encrypt =AES_CBC_encrypt; ipc_sdk_run_var.aes_hw_info.aes_fun.destory = AES_CBC_destory; -
调用函数
TUYA_IPC_SDK_START,此函数中创建的tuya_ipc_sdk_mqtt_online_proc线程调用的tuya_ipc_cloud_storage_init函数已集成云存储的相关功能。media_setting参数参考结构体IPC_MEDIA_INFO_S。/** * \fn OPERATE_RET tuya_ipc_cloud_storage_init * \brief 初始化云存储,此操作之后将分配所有所需的内存 * aes_func 为加密方式 * \param[in] 用于确定所需的内存和存储 * \return OPERATE_RET */ OPERATE_RET tuya_ipc_cloud_storage_init(IN IPC_MEDIA_INFO_S *media_setting, IN AES_HW_CBC_FUNC *aes_func);
-
-
事件云存储录像:
-
当 IPC 检测到需要上报的事件时,调用
tuya_ipc_start_storage函数,开始事件的存储,函数如下:/** * \fn OPERATE_RET tuya_ipc_start_storage * \brief 开始存储 * \param[in] storage_type: 存储类型。E_ALARM_SD_STORAGE(本地存储), E_ALARM_CLOUD_STORAGE(云存储) * \return 如果开始存储成功,返回 OPRT_OK,其他情况则是失败 */ OPERATE_RET tuya_ipc_start_storage(INT_T storage_type); -
SDK 中的云存储线程会自行将填加的事件信息传输至云端。
-
当事件结束时,调用:
tuya_ipc_stop_storage终止云存储事件录像。其函数部分解析如下/** * \fn OPERATE_RET tuya_ipc_stop_storage * \brief 停止存储 * \param[in] storage_type: 存储类型。E_ALARM_SD_STORAGE(本地存储), E_ALARM_CLOUD_STORAGE(云存储) * \return 如果停止存储成功,返回 OPRT_OK,其他情况则是失败 */ OPERATE_RET tuya_ipc_stop_storage(INT_T storage_type);
-
设备解绑与复位
本章节主要简述设备通过 App 解绑与按复位键这两种复位方式的开发流程与区别。
设备解绑开发流程
-
App 删除设备 按键,SDK 将清除 DB 文件中的配网信息并执行回调函数:
IPC_APP_Reset_System_CB重启设备,函数如下所示:需要在函数内,实现设备的重启与对 DP 数据文件进行重置操作,不需要删除 DB 文件。
VOID IPC_APP_Reset_System_CB(GW_RESET_TYPE_E type) { printf("reset ipc success. please restart the ipc %d\n", type); IPC_APP_Notify_LED_Sound_Status_CB(IPC_RESET_SUCCESS); //TODO /* Developers need to restart IPC operations */ }
设备复位开发流程
-
设备检测到复位键被按下,存在复位操作,删除三个 DB 文件:
tuya_user.db_bak、tuya_user.db与tuya_enckey.db。 -
设备对 DP 数据文件进行重置操作并重启。
更多详情,请参考 硬件交互定义。
AP 模式切换功能开发
本章节主要简述通过 App 控制设备开关 AP 模式的功能开发。开发完成后,可以通过 App 开启或关闭设备的 AP 模式。
设备配网完成后,在 STATION 模式下工作。当设备切换到 AP 模式后,App 可以连接到设备发出的热点,此时不需第三方网络就可以进行实时预览和基本功能的配置等。
-
AP 模式查询 DP 点:231
#define TUYA_DP_AP_MODE 231 /*App 下发 NULL 查询,设备返回 { "is_ap": %d, ap_ssid: "%s",password:"%s" }*/设备需要实现对 DP 点 231 的处理,根据设备当前所处模式,按照 DP 点格式回复。
其中
is_ap为设备是否在 AP 模式下工作。1 为 是,0 为否。app_ssid为工作在 AP 模式下的 ssid。password 为 AP 模式下的认证密码,password 的值可以为空。 -
AP 模式开关 DP 点:232
#define TUYA_DP_AP_SWITCH 232 /*App 下发数据格式:{ "ap_enable" : %d, "ap_ssid" : "%s", "ap_pwd" : "%s" },设备返回数据格式:{ "ap_enable" : 1, "errcode" : 0 }*/DP 点 232 控制设备开启或关闭 AP 模式。当关闭 AP 模式后,设备会在一分钟后自动进入 STATION 模式重连配网热点。
其中
ap_enable为开启或关闭 AP 模式。1 为开启,0 为关闭。errorcode为错误码,0 为成功,其他为失败。 -
AP 模式时间同步 DP 点:233
#define TUYA_DP_AP_TIME_SYNC 233 /*App 下发数据格式:{ "%s" }*/由于 AP 模式无法从互联网获取时间,需要根据 App 下发的 DP 点数据,设置 SDK 时间。数据格式为 STR 类型的 Unix 时间戳:{ "1629808340" }。
-
AP 模式时区同步 DP 点:234
#define TUYA_DP_AP_TIME_ZONE 234 /*App 下发数据格式:{ "%s" }*/根据 App 下发的 DP 点数据设置时区,数据格式为 STR 类型:{ "+8" }。
开发相关函数
-
tuya_adapter_wifi_ap_start函数,开启设备 AP 模式,您需要根据设备 Wi-Fi 自行实现这个接口。OPERATE_RET tuya_adapter_wifi_ap_start(CONST WF_AP_CFG_IF_S *cfg); -
WF_AP_CFG_IF_S结构体/* tuya sdk definition of ap config info */ typedef struct { unsigned char ssid[WIFI_SSID_LEN+1]; ///< ssid unsigned char s_len; ///< len of ssid unsigned char passwd[WIFI_PASSWD_LEN+1]; ///< passwd unsigned char p_len; ///< len of passwd unsigned char chan; ///< channel. default:6 WF_AP_AUTH_MODE_E md; ///< encryption type unsigned char ssid_hidden; ///< ssid hidden default:0 unsigned char max_conn; ///< max sta connect nums default:3 unsigned short ms_interval; ///< broadcast interval default:100 NW_IP_S ip; ///< ip info for ap mode }WF_AP_CFG_IF_S; /* tuya sdk definition of wifi encryption type */ typedef enum { WAAM_OPEN = 0, ///< open WAAM_WEP, ///< WEP WAAM_WPA_PSK, ///< WPA—PSK WAAM_WPA2_PSK, ///< WPA2—PSK WAAM_WPA_WPA2_PSK, ///< WPA/WPA2 WAAM_UNKNOWN, //unknown }WF_AP_AUTH_MODE_E; -
tuya_adapter_wifi_ap_stop函数,关闭设备 AP 模式。您需要根据设备 Wi-Fi 自行实现这个接口。OPERATE_RET tuya_adapter_wifi_ap_stop(VOID);
示例开发流程
-
AP 模式查询
-
开启 AP 模式查询功能。在
tuya_ipc_dp_utils.h定义相关 DP,如:#define TUYA_DP_AP_MODE 231 -
在
tuya_ipc_dp_utils.c的s_dp_table[]中加入:#ifdef TUYA_DP_AP_MODE {TUYA_DP_AP_MODE, handle_DP_AP_MODE}, #endifhandle_DP_AP_MODE函数为对应 DP 操作函数,其 demo 函数如下:#ifdef TUYA_DP_AP_MODE STATIC VOID handle_DP_AP_MODE(IN TY_OBJ_DP_S *p_dp_json) { if(p_dp_json == NULL ) { printf("Error!! type invalid\r\n"); return; } respone_dp_str(TUYA_DP_AP_MODE, IPC_APP_get_ap_mode()); } #endifIPC_APP_get_ap_mode函数根据当前设备 Wi-Fi 模式组装 DP 点回复数据:{ "is_ap": %d, ap_ssid: "%s",password:"%s" },IPC_APP_get_ap_mode函数的大致实现:通过
tuya_adapter_wifi_get_work_mode函数获取当前设备 Wi-Fi 工作模式,以是否返回 AP 模式作为is_ap的值。通过
tuya_adapter_wifi_get_mac函数获取设备 Wi-Fi mac,并把 ssid 拼接成TUYA_IPC-xxxx,作为ap_ssid的值,您可以根据实际需求自定义ap_ssid的值。通过
__tuya_app_read_STR函数获取tuya_ap_passwd配置项,作为 AP 模式时的认证密码,作为 password 的值,您可以根据实际需求自定义 password 的值。 -
在主函数中调用
IPC_APP_handle_dp_cmd_objs函数,对接收到服务器下发的 DP 数据进行处理,判断是否触发此 DP 对应的功能函数(TUYA_IPC_SDK_START函数中已调用此函数)。
-
-
AP 模式开关
-
开启 AP 模式开关功能(在
tuya_ipc_dp_utils.h定义相关 DP),如:#define TUYA_DP_AP_SWITCH 232 -
在
tuya_ipc_dp_utils.c的s_dp_table[]中加入:#ifdef TUYA_DP_AP_SWITCH {TUYA_DP_AP_SWITCH, handle_DP_AP_SWITCH}, #endifhandle_DP_AP_SWITCH函数为对应 DP 操作函数,其 demo 函数如下:#ifdef TUYA_DP_AP_SWITCH STATIC VOID handle_DP_AP_SWITCH(IN TY_OBJ_DP_S *p_dp_json) { CHAR_T resp[32] = {0}; INT_T ap_enable = IPC_APP_set_ap_mode((cJSON *)p_dp_json->value.dp_str); if(ap_enable < 0) { snprintf(resp, 32, "{\\\"ap_enable\\\":0,\\\"errcode\\\":0}"); } else { snprintf(resp, 32, "{\\\"ap_enable\\\":%d,\\\"errcode\\\":0}",ap_enable); } respone_dp_str(TUYA_DP_AP_SWITCH, resp); respone_dp_str(TUYA_DP_AP_MODE, IPC_APP_update_ap_mode(ap_enable)); //switch ap mode, need update ap mode value if(ap_enable >= 0) { change_ap_process(); } } #endif其中
IPC_APP_set_ap_mode函数主要完成对下发 DP 点数据的解析和状态置位等。以下两个 DP 点的回复都是必须的,在回复完 DP 点 232 之后,需要再根据 DP 点 232 的请求回复一次 DP 点 231,以更新 DP 点 231 的最新值。
respone_dp_str(TUYA_DP_AP_SWITCH, resp); respone_dp_str(TUYA_DP_AP_MODE, IPC_APP_update_ap_mode(ap_enable)); //switch ap mode, need update ap mode value由于在切换 AP 模式后原来的网络连接会丢失,所以需要在回复 DP 点数据之后再进行 AP 模式的切换,实际切换在
change_ap_process函数中另开线程完成。VOID change_ap_process() { pthread_t ap_change_thread; int ret = pthread_create(&ap_change_thread, NULL, __ap_change_thread, NULL); if(ret != 0) { printf("ap_change_thread ,create fail! ret:%d\n",ret); return; } pthread_detach(ap_change_thread); }Demo 中实际开启 AP 模式在线程函数
__ap_change_thread中实现,在调用tuya_adapter_wifi_ap_start函数开启 AP 模式前需要调用tuya_devos_netlink_monitor_disable函数,关闭对配网 Wi-Fi 连接的监视。调用
tuya_adapter_wifi_ap_stop函数关闭 AP 模式后,需要调用tuya_devos_netlink_monitor_enable函数开启对配网 Wi-Fi 连接的监视。 -
在主函数中调用
IPC_APP_handle_dp_cmd_objs函数对接收到服务器下发的 DP 数据进行处理,判断是否触发此 DP 对应的功能函数(TUYA_IPC_SDK_START函数中已调用此函数)。
-
-
AP 模式时间同步
-
开启 AP 模式时间同步功能(在
tuya_ipc_dp_utils.h定义相关 DP),如:#define TUYA_DP_AP_TIME_SYNC 233 -
在
tuya_ipc_dp_utils.c的s_dp_table[]中加入:#ifdef TUYA_DP_AP_TIME_SYNC {TUYA_DP_AP_TIME_SYNC, handle_DP_AP_TIME_SYNC}, #endifhandle_DP_AP_TIME_SYNC函数具体实现请参考 demo。 -
在主函数中调用
IPC_APP_handle_dp_cmd_objs函数,对接收到服务器下发的 DP 数据进行处理,判断是否触发此 DP 对应的功能函数(TUYA_IPC_SDK_START函数中已调用此函数)。
-
-
AP 模式时区同步
-
开启 AP 模式时区同步功能(在
tuya_ipc_dp_utils.h定义相关 DP),如:#define TUYA_DP_AP_TIME_ZONE 234 -
在
tuya_ipc_dp_utils.c的s_dp_table[]中加入:#ifdef TUYA_DP_AP_TIME_ZONE {TUYA_DP_AP_TIME_ZONE, handle_DP_AP_TIME_ZONE}, #endifhandle_DP_AP_TIME_ZONE函数具体实现请参考 demo。 -
在主函数中调用
IPC_APP_handle_dp_cmd_objs函数,对接收到服务器下发的 DP 数据进行处理,判断是否触发此 DP 对应的功能函数(TUYA_IPC_SDK_START函数中已调用此函数)。
-
-
设备开机进入 AP 模式
-
设备开启 AP 模式后,为了关机后不丢失状态,您需要将设备 AP 模式相关配置保存到设备,待到开机时根据保存的配置调用开启 AP 模式的函数。
-
Demo 中
tuya_ipc_sdk_mqtt_online_proc函数所示,本地存储和 P2P 均在联网同步到时间后才进行初始化。但开机若为 AP 模式,这是无法实现的,所以需要单独根据 AP 模式配置进行初始化,如 demo 中tuya_ipc_ap_mode_start_proc函数所示。 -
在
user_main.c的 main 函数中,调用TUYA_IPC_SDK_START函数之后调用IPC_APP_get_ap_mode_config函数获取 AP 模式相关配置,再调用IPC_APP_switch_ap_mode函数开启 AP 模式。设备在配网之后每次启动 SDK 会默认进入 STATION 模式。如果需要在开机后开启 AP 模式,需要先等
TUYA_IPC_SDK_START函数调用完成之后,再调用开启 AP 模式的函数,防止再被 STATION 模式覆盖。
-
API 适配
更多详情,请参考 SDK 接口说明。
FAQs
该内容对您有帮助吗?
是意见反馈该内容对您有帮助吗?
是意见反馈





