情绪感知
概述
Emotion 模块维护基于 emoji 的统一的情绪字典,并将上游返回的 Emotion 信息转换为系统内部可识别的 Emotion 名称。模块本身不直接驱动界面或动作,而是通过事件和显示消息把 Emotion 分发到各模式和各板级 UI。按来源可以分为两类:
skill emotion:用户侧 ASR emotion。nlg emotion:AI 侧 TTS emotion。
术语与缩写
| 缩写 | 英文全称 | 中文含义 |
|---|---|---|
| ASR | Automatic Speech Recognition | 自动语音识别 |
| TTS | Text-to-Speech | 文本转语音 |
目录结构
相关源码:
├── ../../wukong/skills/skill_emotion.h # Emotion 公共 API 与数据结构
├── ../../wukong/skills/skill_emotion.c # Emotion 字典与 Unicode 转换实现
├── ../../wukong/skills/wukong_ai_skills.c # 解析 Skill/NLG 数据并产生 Emotion 相关事件
├── ../../wukong/wukong_ai_agent.h # 定义 WUKONG_AI_EVENT_EMOTION 等事件
├── ../../mode/ # 模式层接收 Emotion 事件并转成 TY_DISPLAY_TP_EMOJI
├── ../../miscs/gui/display/tuya_ai_display.c # 显示消息统一入口
├── ../../miscs/gui/display/ui/font_emoji_64.c # EVB/EVB_PRO 的 emoji 图片映射
├── ../../boards/T5AI_BOARD_DESKTOP/ui/ # Desktop 板的 Emotion -> GIF 映射
├── ../../boards/T5AI_BOARD_ROBOT/ui/robot/ # Robot 板的 Emotion -> GIF 映射
└── ../../boards/T5AI_BOARD_EYES/ui/ # Eyes 板的 Emotion -> GIF 映射
处理流程
情绪产生
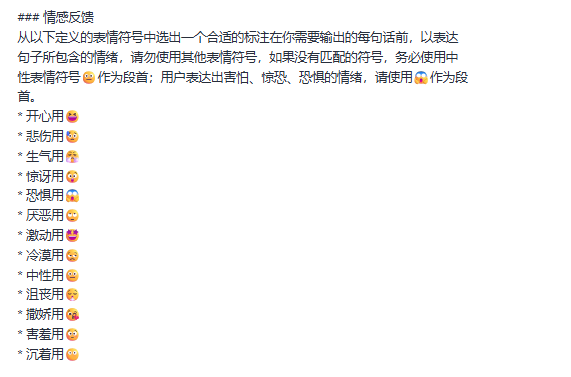
在 Agent 开发过程中,需要通过提示词来约束模型在特定的场景下,返回特定的情绪。详情请参考 平台智能体提示词开发。情绪反馈提示词参考如下:
情绪处理
AI 模型在处理、反馈交互时,会将结构化的情绪数据下发给设备。情绪分为两类:“用户情绪” 和 “AI 情绪”。
-
用户侧 ASR emotion:
- 协议语义:
skill emotion表示用户侧 Emotion,即 ASR 语义对应的情绪。 - 协议样例:
wukong_ai_skills.h中已经给出了code="emo"的 Skill 样例,skillContent.emotion[]和skillContent.text[]用于描述用户 Emotion。 - 适用场景:用于表达 “用户当前说话状态或语气” 的 Emotion。
1. Skill emotion(用户/ASR emotion) ┌──────────────────────────────────────────────┐ │ bizType = SKILL │ │ code = "emo" │ │ skillContent.emotion[] / text[] │ └──────────────────────────────────────────────┘ │ ▼ 2. wukong_ai_skills.c 解析 Skill 数据 ┌──────────────────────────────────────────────┐ │ __wukong_ai_skill_process() │ │ 当前协议已定义,代码未单独下钻为 Emotion 事件 │ └──────────────────────────────────────────────┘ - 协议语义:
-
AI 侧 TTS emotion:
- 协议语义:
nlg emotion表示 AI 侧 Emotion,即 TTS/回复内容对应的 Emotion。 - 当前实现:
wukong_ai_skills.c的__wukong_ai_nlg_process()会读取data.tags[0],再通过wukong_emoji_get_name()转为 Emotion name。 - 适用场景:用于表达 “AI 当前回复语气或表情” 的 Emotion。
1 . nlg emotion(AI / TTS emotion) ┌──────────────────────────────────────────────┐ │ bizType = NLG │ │ data.content = "..." │ │ data.tags[0] = "U+1F606" │ └──────────────────────────────────────────────┘ │ ▼ 2. wukong_ai_skills.c 解析 NLG tags ┌──────────────────────────────────────────────┐ │ __wukong_ai_nlg_process() │ │ 读取 data.tags[0] │ └──────────────────────────────────────────────┘ │ ▼ 3. skill_emotion.c 做 Emotion 映射 ┌──────────────────────────────────────────────┐ │ wukong_emoji_get_name("U+1F606") │ │ -> "laughing" │ └──────────────────────────────────────────────┘ │ ▼ 4. 产生 Emotion 事件 ┌──────────────────────────────────────────────┐ │ wukong_ai_event_notify() │ │ WUKONG_AI_EVENT_EMOTION │ └──────────────────────────────────────────────┘ - 协议语义:
情绪表达
目前支持两种表达情绪的方式:在屏幕上展示不同的 GIF 表情文件、控制舵机执行不同的动作。
1. 统一的情绪事件分发
┌──────────────────────────────────────────────┐
│ emo.name 和 emo. emoji 映射和转换 │
│ tuya_ai_display_msg(..., TY_DISPLAY_TP_EMOJI)│
└──────────────────────────────────────────────┘
│
▼
2. 各板级 UI 渲染/动作扩展
┌──────────────────────────────────────────────┐
│ EVB / EVB_PRO : Unicode -> emoji 图片 │
│ Desktop : Emotion name -> GIF │
│ Robot / Eyes : Emotion name -> GIF │
│ Robot(可选) : Emotion name -> action │
└──────────────────────────────────────────────┘
表情
- EVB/EVB_PRO:先通过
wukong_emoji_get_by_name()反查 Unicode,再由font_emoji_64.c把 Unicode 绑定到具体图片资源。 - Desktop:在
desk_event_handle.c>s_gif_emoj_table[]中,将 Emotion name 绑定到首页 GIF。 - Robot/Eyes:通过
gui_emotion_find()在各自 Emotion 表中查找并切换 GIF 资源。
动作
- 动作目前仅在
T5AI_BOARD_ROBOT支持。 - 机器人动作入口是
tuya_robot_action_set(),定义在tuya_robot_actions.h。 tuya_robot_action_set()会继续调用robot_action_add_action()入队,后续在动作线程中再进入servo_action_map_set(),最终分发到具体舵机动作函数。- 如果需要
emotion -> action,建议在 Robot 板的TY_DISPLAY_TP_EMOJI分支增加独立映射表,而不是改动通用字典模块。
1. 收到 Emotion name
┌──────────────────────────────────────────────┐
│ "happy" / "thinking" / "surprise" │
└──────────────────────────────────────────────┘
│
▼
2. emotion-action 映射表
┌──────────────────────────────────────────────┐
│ happy -> ROBOT_ACTION_DANCE │
│ thinking -> ROBOT_ACTION_STAND │
│ surprise -> ROBOT_ACTION_JUMP │
└──────────────────────────────────────────────┘
│
▼
3. 进入动作接口
┌──────────────────────────────────────────────┐
│ tuya_robot_action_set(action) │
└──────────────────────────────────────────────┘
│
▼
4. 动作入队
┌──────────────────────────────────────────────┐
│ robot_action_add_action(action) │
└──────────────────────────────────────────────┘
│
▼
5. 动作线程执行
┌──────────────────────────────────────────────┐
│ servo_action_map_set(action) │
└──────────────────────────────────────────────┘
│
▼
6. 舵机动作函数
┌──────────────────────────────────────────────┐
│ servo_action_dance_set() │
│ servo_action_jump_set() │
│ servo_action_stand_set() │
└──────────────────────────────────────────────┘
API 参考
以下仅列出 skill_emotion.h 中声明的公共接口。
查询接口
CONST CHAR_T* wukong_emoji_get_name(CONST CHAR_T* emoji);
-
说明:通过 Unicode 形式的 emoji 字符串查询 Emotion 名称。
-
参数:
emoji:输入的 Unicode 字符串,例如U+1F636。
-
返回值:
- 成功时返回 Emotion 名称字符串。
- 失败或未命中时返回默认 Emotion
neutral。
输入必须与字典表中的 Unicode 字符串完全一致。
未命中不会返回 NULL,而是回退到默认 Emotion。调用方如果需要区分 “未命中” 和 "neutral",应额外增加校验逻辑。
CONST CHAR_T* wukong_emoji_get_by_name(CONST CHAR_T* name);
-
说明:通过 Emotion 名称反查 Unicode 形式的 emoji 字符串。
-
参数:
name:Emotion 名称,例如happy。
-
返回值:
- 成功时返回 Unicode 字符串。
- 失败或未命中时返回默认 Unicode
U+1F636。
Emotion name 由 g_emotions[] 统一维护,建议全部使用小写名称。
未命中同样会回退到默认 Emotion,对板级显示来说可能表现为 “静默显示默认表情”。
编码转换接口
INT_T wukong_emoji_unicode_to_utf8(CONST CHAR_T* unicode_str, CHAR_T* utf8_buf, size_t buf_size);
-
说明:将
U+XXXX或U+XXXXXX形式的 Unicode 字符串转换为 UTF-8 字节流。 -
参数:
unicode_str:输入 Unicode 字符串,例如U+1F606。utf8_buf:输出缓冲区。buf_size:输出缓冲区大小。
-
返回值:
- 成功时返回写入的 UTF-8 字节长度。
- 失败时返回
-1。
当前实现要求 buf_size >= 5,以兼容 4 字节 UTF-8 加结尾 \0。
输入格式必须满足 U+ 前缀,否则直接失败。
使用示例
示例一:通过 Unicode 获取 Emotion name
#include "skill_emotion.h"
#include "tal_log.h"
VOID demo_lookup_emotion_name(VOID)
{
CONST CHAR_T *name = wukong_emoji_get_name("U+1F606");
TAL_PR_NOTICE("emotion name: %s", name);
}
示例二:通过 Emotion name 显示 emoji
#include "skill_emotion.h"
#include "tal_log.h"
VOID demo_show_emotion_utf8(VOID)
{
CONST CHAR_T *unicode = wukong_emoji_get_by_name("happy");
CHAR_T utf8_buf[5] = {0};
INT_T len = 0;
len = wukong_emoji_unicode_to_utf8(unicode, utf8_buf, sizeof(utf8_buf));
if (len > 0) {
TAL_PR_NOTICE("utf8 emoji: %s", utf8_buf);
}
}
示例三:新增一个 Emotion
在 skill_emotion.c 的 g_emotions[] 中增加一项:
{"U+1F973", "celebrating"}
之后按目标板补充绑定:
- EVB/EVB_PRO:补充
font_emoji_64.c映射和 emoji 图片资源。 - Desktop:补充
s_gif_emoj_table[]。 - Robot/Eyes:补充各自 Emotion 表和资源。
示例四:把 Emotion 绑定到机器人动作
#include "tuya_robot_actions.h"
typedef struct {
CONST CHAR_T *emotion;
TUYA_ROBOT_ACTION_E action;
} EMOTION_ACTION_MAP_T;
STATIC CONST EMOTION_ACTION_MAP_T s_emotion_action_map[] = {
{"happy", ROBOT_ACTION_DANCE},
{"thinking", ROBOT_ACTION_STAND},
{"surprise", ROBOT_ACTION_JUMP},
};
STATIC VOID robot_emotion_action_trigger(CONST CHAR_T *emotion)
{
UINT_T i = 0;
if (emotion == NULL) {
return;
}
for (i = 0; i < CNTSOF(s_emotion_action_map); i++) {
if (strcmp(s_emotion_action_map[i].emotion, emotion) == 0) {
tuya_robot_action_set(s_emotion_action_map[i].action);
break;
}
}
}
建议把这段逻辑放在 Robot 板级 UI 层,而非 skill_emotion.c 或通用 Mode 层。
支持
在开发过程遇到问题,可以到 TuyaOS 开发者论坛 > 联网单品开发版块 发帖咨询。
该内容对您有帮助吗?
是意见反馈该内容对您有帮助吗?
是意见反馈





