PWM
更新时间:2025-04-29 08:08:04LLM 副本以 Markdown 格式查看下载 PDF
概述
脉冲宽度调制(Pulse Width Modulation,PWM)是利用微处理器的数字输出对模拟电路进行控制的一种有效的技术。
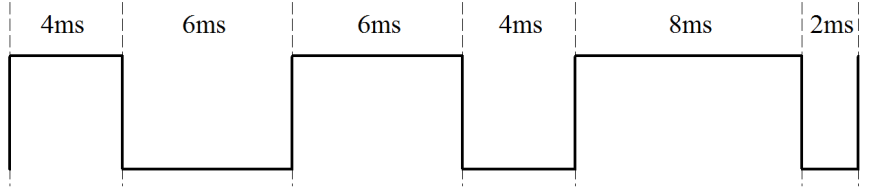
如上图所示,是一个周期频率为 100Hz 的 PWM 波形,高电平占空比为 40%,低电平占空比为 60%,通过调节高电平占空比的值,即可以改变模拟输出值的大小。
API 描述
tkl_pwm_init
OPERATE_RET tkl_pwm_init(TUYA_PWM_NUM_E ch_id, CONST TUYA_PWM_BASE_CFG_T *cfg);
-
功能描述:
- 通过端口号和基础配置初始化对应的 PWM 实例,返回初始化结果
-
参数:
-
ch_id:通道号 -
cfg:PWM 基础配置,包含输出极性、占空比、频率typedef struct { TUYA_PWM_POLARITY_E polarity; TUYA_PWM_COUNT_E count_mode; //pulse duty cycle = duty / cycle; exp duty = 5000,cycle = 10000; pulse duty cycle = 50% UINT_T duty; UINT_T cycle; UINT_T frequency; // (bet: Hz) } TUYA_PWM_BASE_CFG_T;-
polarity:名字 定义 TUYA_PWM_NEGATIVE PWM 低有效输出 TUYA_PWM_POSITIVE PWM 高有效输出 -
count_mode:计数模式,有TUYA_PWM_CNT_UP和TUYA_PWM_CNT_UP_AND_DOWN两种 -
duty:占空比,和cycle搭配使用,输出 =duty/cycle -
cycle:周期或颗粒度,输出 =duty/cycle -
frequency:输出频率,单位 Hz
-
-
-
返回值:
OPRT_OK:成功- 其他请参考文件
tuya_error_code.h
tkl_pwm_deinit
OPERATE_RET tkl_pwm_deinit(TUYA_PWM_NUM_E ch_id);
- 功能描述:
- PWM 实例反初始化
- 该接口会停止 PWM 实例正在进行的传输(如果有),并且释放相关的软硬件资源
- 参数:
ch_id:通道号
- 返回值:
OPRT_OK:成功- 其他请参考文件
tuya_error_code.h
tkl_pwm_start
OPERATE_RET tkl_pwm_start(TUYA_PWM_NUM_E ch_id);
- 功能描述:
- 启动 PWM
- 参数:
ch_id:通道号
- 返回值:
OPRT_OK:成功- 其他请参考文件
tuya_error_code.h
tkl_pwm_stop
OPERATE_RET tkl_pwm_stop(TUYA_PWM_NUM_E ch_id);
- 功能描述:
- 停止 PWM
- 参数:
port:端口号
- 返回值:
OPRT_OK:成功- 其他请参考文件
tuya_error_code.h
tkl_pwm_multichannel_start
OPERATE_RET tkl_pwm_multichannel_start(TUYA_PWM_NUM_E *ch_id, UINT8_T num);
- 功能描述:
- 同时启动多通道 PWM,用于多路组合输出,用于对时序要求比较严格的场景
- 参数:
ch_id:通道号列表,数组num:启动的通道号数目
- 返回值:
OPRT_OK:成功- 其他请参考文件
tuya_error_code.h
tkl_pwm_multichannel_stop
OPERATE_RET tkl_pwm_multichannel_stop(TUYA_PWM_NUM_E *ch_id, UINT8_T num);
-
功能描述:
- 同时停止多通道 PWM,用于多路组合输出,对时序要求比较严格的场景
-
参数:
ch_id:通道号列表,数组num:需要关闭的通道号数目
-
返回值:
OPRT_OK:成功- 其他请参考文件
tuya_error_code.h
tkl_pwm_info_set
OPERATE_RET tkl_pwm_info_set(TUYA_PWM_NUM_E ch_id, CONST TUYA_PWM_BASE_CFG_T *info);
- 功能描述:
- 设置 PWM 配置参数,PWM start 之后可动态修改配置,并重新 Start
- 参数:
ch_id:通道号info:PWM 基础配置,包含输出极性、占空比、频率。其结构体参数见上文描述
- 返回值:
- 错误码,
OPRT_OK表示成功 - 其他请参考文件
tuya_error_code.h
- 错误码,
tkl_pwm_info_get
OPERATE_RET tkl_pwm_info_get(TUYA_PWM_NUM_E ch_id, TUYA_PWM_BASE_CFG_T *info);
- 功能描述:
- 获取 PWM 配置信息
- 参数:
ch_id:通道号info:PWM 基础配置,包含输出极性、占空比、频率。其结构体参数见上文描述
- 返回值:
- 错误码,
OPRT_OK表示成功 - 其他请参考文件
tuya_error_code.h
- 错误码,
tkl_pwm_cap_start
OPERATE_RET tkl_pwm_cap_start(TUYA_PWM_NUM_E ch_id, CONST TUYA_PWM_CAP_IRQ_T *cfg);
-
功能描述:
- 开启 PWM 输入捕获模式
-
参数:
-
ch_id:通道号 -
cfg:PWM 输入捕获配置,如下详述-
cap_mode:名字 定义 TUYA_PWM_CAPTURE_MODE_ONCE 单次触发模式 TUYA_PWM_CAPTURE_MODE_PERIOD 多次触发模式 -
trigger_level:名字 定义 TUYA_PWM_NEGATIVE 触发信号为下降沿 TUYA_PWM_POSITIVE 触发信号为上升沿 -
clk:抓取信号的采样时钟 -
cb:抓取信号的回调函数,如下:typedef VOID_T (*TUYA_PWM_IRQ_CB)(TUYA_PWM_NUM_E port, TUYA_PWM_CAPTURE_DATA_T data, VOID_T *arg);typedef struct { UINT_T cap_value; /* Captured data */ TUYA_PWM_POLARITY_E cap_edge; /* Capture edge, TUYA_PWM_NEGATIVE:falling edge, TUYA_PWM_POSITIVE:rising edge */ } TUYA_PWM_CAPTURE_DATA_T; -
arg:回调函数参数
-
-
-
返回值:
- 错误码,
OPRT_OK表示成功 - 其他请参考文件
tuya_error_code.h
- 错误码,
tkl_pwm_cap_stop
OPERATE_RET tkl_pwm_cap_stop(TUYA_PWM_NUM_E ch_id);
-
功能描述:
- 关闭 PWM 输入捕获模式
-
参数:
ch_id: 通道号
-
返回值:
- 错误码,
OPRT_OK表示成功 - 其他请参考文件
tuya_error_code.h
- 错误码,
示例
void tuya_pwm_test(void)
{
OPERATE_RET ret;
TUYA_PWM_BASE_CFG_T cfg = {.polarity = TUYA_PWM_POSITIVE,\
.duty = 1000,
.cycle = 10000,
.frequency = 1000};
ret = tkl_pwm_init(TUYA_PWM_NUM_0, &cfg);
if (ret != OPRT_OK) {
//fail
return;
}
ret = tkl_pwm_start(TUYA_PWM_NUM_0);
if (ret != OPRT_OK) {
//fail
return;
}
tkl_system_delay(5000);
ret = tkl_pwm_info_get(TUYA_PWM_NUM_0, &cfg);
if (ret != OPRT_OK) {
//fail
return;
}
if(cfg.duty !=5000){
cfg.duty =5000;
}
ret = tkl_pwm_info_set(TUYA_PWM_NUM_0, &cfg);
//delay
tkl_system_delay(5000);
ret = tkl_pwm_stop(TUYA_PWM_NUM_0);
if (ret != OPRT_OK) {
//fail
return;
}
ret = tkl_pwm_deinit(TKL_PWM1_CH);
if (ret != OPRT_OK) {
//fail
return;
}
}
该内容对您有帮助吗?
是意见反馈该内容对您有帮助吗?
是意见反馈
关注“涂鸦智能”
涂鸦服务尽在掌握

关注“全球智能商业”
第一时间获取物联网资讯




