SPI
更新时间:2025-05-06 06:22:12LLM 副本以 Markdown 格式查看下载 PDF
概述
SPI(Serial Peripheral Interface)是一种高速、全双工、同步的通信总线。SPI 以主从方式工作,通常有一个主设备和一个或多个从设备。
SPI 控制器的信号线描述如下:
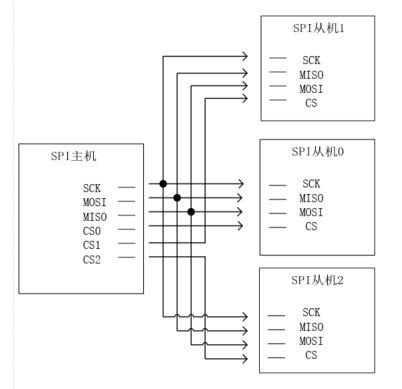
- MISO:主设备数据输入,从设备数据输出。
- MOSI:主设备数据输出,从设备数据输入。
- SCK:时钟信号,由主设备产生。
- CS:从设备使能信号,由主设备控制。这个信号可以是 SPI 外设的一部分,也可用 GPIO 引脚实现。
SPI 典型接线方式如下:
SPI 总线支持的四种工作方式,取决于串行同步时钟极性 CPOL 和串行同步时钟相位 CPHA 的组合。
- CPOL 是用来决定 SCLK 时钟信号空闲时的电平。CPOL = 0,空闲电平为低电平;CPOL = 1,空闲电平为高电平。
- CPHA 是用来决定采样时刻的。CPHA = 0,在每个周期的第一个时钟沿采样,第二个时钟沿数据输出;CPHA = 1,在每个周期的第二个时钟沿采样,第一个时钟沿数据输出。
- SPI 主模块和与之通信的外设时钟相位和极性应该一致。
四种工作方式时序描述如下:
-
模式 0:CPOL = 0,CPHA = 0。SCK 串行时钟线空闲是为低电平,数据在 SCK 时钟的上升沿被采样,数据在 SCK 时钟的下降沿切换。
-
模式 1:CPOL = 0,CPHA = 1。SCK 串行时钟线空闲是为低电平,数据在 SCK 时钟的下降沿被采样,数据在 SCK 时钟的上升沿切换。
-
模式 2:CPOL = 1,CPHA = 0。SCK 串行时钟线空闲是为高电平,数据在 SCK 时钟的下降沿被采样,数据在 SCK 时钟的上升沿切换。
-
模式 3:CPOL= 1,CPHA=1。SCK 串行时钟线空闲是为高电平,数据在 SCK 时钟的上升沿被采样,数据在 SCK 时钟的下降沿切换。
API 描述
tkl_spi_init
OPERATE_RET tkl_spi_init(TUYA_SPI_NUM_E port, CONST TUYA_SPI_BASE_CFG_T *cfg);
-
功能描述:
- 通过端口号和基础配置初始化对应的 SPI 实例,返回初始化结果。
-
参数:
port:端口号。cfg:SPI 基础配置。
typedef struct { TUYA_SPI_ROLE_E role; TUYA_SPI_MODE_E mode; TUYA_SPI_TYPE_E type; TUYA_SPI_DATABITS_E databits; TUYA_SPI_BIT_ORDER_E bitorder; UINT_T freq_hz; UINT_T spi_dma_flags; /*!< SPI dma format , 1 use dma */ } TUYA_SPI_BASE_CFG_T;TUYA_SPI_ROLE_E:
名字 定义 TUYA_SPI_ROLE_INACTIVE SPI 闲置 TUYA_SPI_ROLE_MASTER SPI 全双工主模式 TUYA_SPI_ROLE_SLAVE SPI 全双工从模式 TUYA_SPI_ROLE_MASTER_SIMPLEX SPI 半双工主模式 TUYA_SPI_ROLE_SLAVE_SIMPLEX SPI 半双工从模式 TUYA_SPI_MODE_E:
名字 定义 TUYA_SPI_MODE0 CPOL = 0, CPHA = 0 TUYA_SPI_MODE1 CPOL = 0, CPHA = 1 TUYA_SPI_MODE2 CPOL = 1, CPHA = 0 TUYA_SPI_MODE3 CPOL = 1, CPHA = 1 TUYA_SPI_TYPE_E:
名字 定义 备注 TUYA_SPI_AUTO_TYPE SS 管脚模式,硬件自动配置 SS:slave select,对应 CS 片选管脚 TUYA_SPI_SOFT_TYPE SS 管脚模式,软件手动配置 - TUYA_SPI_SOFT_ONE_WIRE_TYPE 三线模式,SS 管脚无效 - TUYA_SPI_DATABITS_E:
名字 定义 TUYA_SPI_DATA_BIT8 8 位数据位模式 TUYA_SPI_DATA_BIT16 16 位数据位模式 TUYA_SPI_BIT_ORDER_E:
名字 定义 TUYA_SPI_ORDER_MSB2LSB 高位(MSB)在前,低位(LSB)在后 TUYA_SPI_ORDER_LSB2MSB 低位(LSB)在前,高位(MSB)在后 -
返回值:
OPRT_OK:成功,其他请参考文件tuya_error_code.h>OS_ADAPTER_SPI定义部分。
tkl_spi_deinit
OPERATE_RET tkl_spi_deinit(TUYA_SPI_NUM_E port);
- 功能描述:
- SPI 实例反初始化。该接口会停止 SPI 实例正在进行的传输(如果有),并且释放相关的软硬件资源。
- 参数:
port:端口号。
- 返回值:
OPRT_OK:成功,其他请参考文件tuya_error_code.h>OS_ADAPTER_SPI定义部分。
tkl_spi_send
OPERATE_RET tkl_spi_send(TUYA_SPI_NUM_E port, VOID_T *data, UINT16_T size);
- 功能描述:
- SPI 启动数据发送。
- 参数:
port:端口号。data:待发送数据的缓冲区地址。size:待发送数据的长度。
- 返回值:
OPRT_OK:成功,其他请参考文件tuya_error_code.h>OS_ADAPTER_SPI定义部分。
tkl_spi_recv
OPERATE_RET tkl_spi_recv(TUYA_SPI_NUM_E port, VOID_T *data, UINT16_T size);
- 功能描述:
- SPI 启动数据接收。
- 参数:
port:端口号。data:待接收数据的缓冲区地址。size:待接收数据的长度。
- 返回值:
OPRT_OK:成功,其他请参考文件tuya_error_code.h>OS_ADAPTER_SPI定义部分。
tkl_spi_transfer
OPERATE_RET tkl_spi_transfer(TUYA_SPI_NUM_E port, VOID_T* send_buf, VOID_T* receive_buf, UINT32_T length);
- 功能描述:
- SPI 启动数据传输。
- 参数:
port:端口号。send_buf:待发送数据的缓冲区地址。receive_buf:待接收数据的缓冲区地址。length:长度。
- 返回值:
OPRT_OK:成功,其他请参考文件tuya_error_code.h>OS_ADAPTER_SPI定义部分。
tkl_spi_abort_transfer
OPERATE_RET tkl_spi_abort_transfer(TUYA_SPI_NUM_E port);
- 功能描述:
- SPI 终止数据传输,或者终止数据发送(接收)。
- 参数:
port:端口号。
- 返回值:
OPRT_OK:成功,其他请参考文件tuya_error_code.h>OS_ADAPTER_SPI定义部分。
tkl_spi_get_status
OPERATE_RET tkl_spi_get_status(TUYA_SPI_NUM_E port, TUYA_SPI_STATUS_T *status);
- 功能描述:
- 获取当前时刻 SPI 的状态。
- 参数:
port:端口号。
- 返回值:
- SPI 状态的结构体,SPI 的状态定义见
TUYA_SPI_STATUS_T的定义。
- SPI 状态的结构体,SPI 的状态定义见
TUYA_SPI_STATUS_T:
| 名字 | 定义 | 备注 |
|---|---|---|
| busy: 1 | 传输/收发忙状态位 | 1:有效 |
| data_lost: 1 | 数据丢失 | 1:有效 |
| mode_fault: 1 | 模式错误 | 1:有效 |
tkl_spi_irq_init
OPERATE_RET tkl_spi_irq_init(TUYA_SPI_NUM_E port, TUYA_SPI_IRQ_CB cb);
- 功能描述:
- SPI 的中断初始化。
- 参数:
port:端口号。cb:中断回调函数。
- 返回值:
OPRT_OK成功,其他请参考文件tuya_error_code.h>OS_ADAPTER_SPI定义部分。
tkl_spi_irq_enable
OPERATE_RET tkl_spi_irq_enable(TUYA_SPI_NUM_E port);
- 功能描述:
- 使能 SPI 的中断。
- 参数:
port:端口号。
- 返回值:
OPRT_OK成功,其他请参考文件tuya_error_code.h>OS_ADAPTER_SPI定义部分。
tkl_spi_irq_disable
OPERATE_RET tkl_spi_irq_disable(TUYA_SPI_NUM_E port);
- 功能描述:
- 关闭 SPI 的中断。
- 参数:
port:端口号。
- 返回值:
OPRT_OK成功,其他请参考文件tuya_error_code.h>OS_ADAPTER_SPI定义部分。
tkl_spi_get_data_count
INT32_T tkl_spi_get_data_count(TUYA_SPI_NUM_E port);
- 功能描述:
- 获取 SPI 传输字节长度。
- 参数:
port:端口号。
- 返回值:
< 0:error≥ 0:上次传输的字节长度
可以是tkl_spi_send、tkl_spi_recv和tkl_spi_transfer任一个的操作。
示例
示例一
void tuya_spi_test1(void)
{
OPERATE_RET ret;
TUYA_SPI_BASE_CFG_T cfg;
TUYA_SPI_STATUS_T status;
// Receive buffer
char rcv_buf[8];
// Data to send
char send_buf[8] = {0,1,2,3,4,5,6,7};
tkl_io_pinmux_config(TUYA_IO_PIN_0, TUYA_SPI0_MISO);
tkl_io_pinmux_config(TUYA_IO_PIN_1, TUYA_SPI0_MOSI);
tkl_io_pinmux_config(TUYA_IO_PIN_2, TUYA_SPI0_CS);
tkl_io_pinmux_config(TUYA_IO_PIN_3, TUYA_SPI0_CLK);
cfg.role = TUYA_SPI_ROLE_MASTER;
cfg.mode = TUYA_SPI_MODE0;
cfg.type = TUYA_SPI_AUTO_TYPE;
cfg.databits = TUYA_SPI_DATA_BIT8;
cfg.bitorder = TUYA_SPI_ORDER_MSB2LSB;
cfg.freq_hz = 1000000;
ret = tkl_spi_init(TUYA_SPI_NUM_0, &cfg);
if (ret != OPRT_OK) {
// Failed
return;
}
ret = tkl_spi_send(TUYA_SPI_NUM_0, send_buf, 8);
if (ret < 0) {
// Failed
}
tkl_spi_get_status(TUYA_SPI_NUM_0, &status);
while (status.busy) {
tkl_spi_get_status(TUYA_SPI_NUM_0, &status);
tkl_system_sleep(2);
}
ret = tkl_spi_recv(TUYA_SPI_NUM_0, rcv_buf, 8);
if (ret < 0) {
// Failed
}
tkl_spi_get_status(TUYA_SPI_NUM_0, &status);
while (status.busy) {
tkl_spi_get_status(TUYA_SPI_NUM_0, &status);
tkl_system_sleep(2);
}
ret = tkl_spi_transfer(TUYA_SPI_NUM_0, send_buf,rcv_buf, 6);
if (ret < 0) {
// Failed
}
tkl_spi_get_status(TUYA_SPI_NUM_0, &status);
while (status.busy) {
tkl_spi_get_status(TUYA_SPI_NUM_0, &status);
tkl_system_sleep(2);
}
// Uninitialize iic
ret = tkl_spi_deinit(TUYA_SPI_NUM_0);
if (ret != 0) {
// Failed
}
}
示例二(中断)
int event_flag = -1;
static void spi_event_cb(TUYA_SPI_NUM_E port, TUYA_SPI_IRQ_EVT_E event)
{
//printf("\nspi_event_cb_fun:%d\n",event);
event_flag = event;
}
void tuya_spi_test2(void)
{
OPERATE_RET ret;
TUYA_SPI_BASE_CFG_T cfg;
TUYA_SPI_STATUS_T status;
// Receive buffer
char rcv_buf[6];
// Data to send
char send_buf[6] = {0x90,0x0,0x0,0x0,0x0,0x0};
tkl_io_pinmux_config(TUYA_IO_PIN_0, TUYA_SPI0_MISO);
tkl_io_pinmux_config(TUYA_IO_PIN_1, TUYA_SPI0_MOSI);
tkl_io_pinmux_config(TUYA_IO_PIN_2, TUYA_SPI0_CS);
tkl_io_pinmux_config(TUYA_IO_PIN_3, TUYA_SPI0_CLK);
cfg.role = TUYA_SPI_ROLE_MASTER;
cfg.mode = TUYA_SPI_MODE0;
cfg.type = TUYA_SPI_AUTO_TYPE;
cfg.databits = TUYA_SPI_DATA_BIT8;
cfg.bitorder = TUYA_SPI_ORDER_MSB2LSB;
cfg.freq_hz = 1000000;
ret = tkl_spi_init(TUYA_SPI_NUM_0, &cfg);
if (ret != OPRT_OK) {
// Failed
return;
}
tkl_spi_irq_init(TUYA_SPI_NUM_0 , spi_event_cb);
tkl_spi_irq_enable(TUYA_SPI_NUM_0);
event_flag = -1;
ret = tkl_spi_transfer(TUYA_SPI_NUM_0, send_buf,rcv_buf, 6);
if (ret < 0) {
// Failed
}
while (TUYA_SPI_EVENT_TRANSFER_COMPLETE != event_flag) {
tkl_system_sleep(2);
}
// Transfer completed
event_flag = -1;
ret = tkl_spi_send(TUYA_SPI_NUM_0, send_buf, 6);
if (ret < 0) {
//failed
}
while (TUYA_SPI_EVENT_TX_COMPLETE != event_flag) {
tkl_system_sleep(2);
}
// Sending completed
event_flag = -1;
ret = tkl_spi_recv(TUYA_SPI_NUM_0, rcv_buf, 6);
if (ret < 0) {
// Failed
}
while (TUYA_SPI_EVENT_RX_COMPLETE != event_flag) {
tkl_system_sleep(2);
}
// Receiving completed
tkl_spi_irq_disable(TUYA_SPI_NUM_0);
// Uninitialize iic
ret = tkl_spi_deinit(TUYA_SPI_NUM_0);
if (ret != 0) {
// Failed
}
}
该内容对您有帮助吗?
是意见反馈该内容对您有帮助吗?
是意见反馈
关注“涂鸦智能”
涂鸦服务尽在掌握

关注“全球智能商业”
第一时间获取物联网资讯




