串口协议
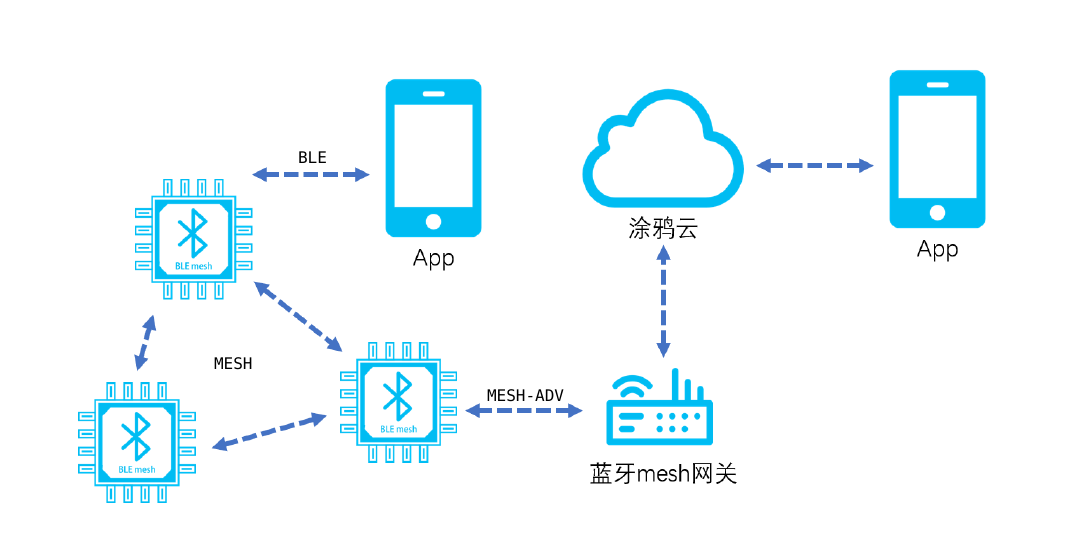
涂鸦蓝牙 Mesh 串口通用协议为涂鸦定制的蓝牙 Mesh 模组串口通用协议,主要用于涂鸦蓝牙 Mesh 模组与其它 MCU 串口直连做串口通信。涂鸦蓝牙 Mesh 串口通用协议适用于下图中的通讯方案架构。
串口通讯约定
| 名词 | 说明 |
|---|---|
| 波特率(bit/s) | 9600/19200/115200 自适应波特率 |
| 数据位 | 8 |
| 奇偶校验 | 无 |
| 停止位 | 1 |
| 数据流控 | 无 |
名词解释
| 名词 | 说明 |
|---|---|
| DP | 一个 DP(Data Point) 指的是一个功能点或者一条/一对指令码。 |
| PID | 您在涂鸦 IoT 开发平台创建的每一个产品都会产生一个唯一的产品编号,即 PID(Product ID)。PID 关联了产品具体的功能点、App 控制面板、出货信息等所有跟这个产品相关的信息。PID 相当于产品的身份证。 |
| Mesh 点播 | 点对点通信,也就是两个设备之间的通信,不允许第三个设备收到信息。 |
| Mesh 组播 | 把网络中的节点分组,一个节点发出的信息,只有相同组号的组员才能收到。 |
| Mesh 广播 | 一个设备上发出的信息所有设备都能接收到。 |
| 节点地址 | 同一个蓝牙 Mesh 网络,每个节点都有一个唯一的地址,可以理解为每个设备的门牌号。取值范围:0x0001~0x5FFF |
| 组地址 | 同一个蓝牙 Mesh 网络的每个节点可以被同时划分到不同组内,每个组都有一个唯一的地址,可以理解为 几幢几单元、哪个小区。取值范围:0xC000~0xFEFF |
| 广播地址 | 同一个蓝牙 Mesh 网络,广播命令可以被所有节点收到,广播命令需要填写的目的地址为广播地址,取值范围:0xFFFF |
帧格式说明
| 字段 | 长度(字节) | 说明 |
|---|---|---|
| 帧头 | 2 | 固定为0x55aa |
| 版本 | 1 | 升级扩展用 |
| 命令字 | 1 | 具体帧类型 |
| 数据长度 | 2 | 大端 |
| 数据 | N | 实体数据 |
| 校验和 | 1 | 从帧头开始按字节求和得出的结果对 256 求余 |
所有大于 1 个字节的数据均采用大端模式传输。
DP 格式说明
| 数据段 | 长度(字节) | 说明 | |||
|---|---|---|---|---|---|
| dpid | 1 | 功能点序号 | |||
| type | 1 | 对应平台上某功能点具体的数据类型,通过如下表示值标识 | |||
| 类型 | 表示值 | 长度(字节) | 说明 | ||
| raw | 0x00 | N | 对应于 raw 型 datapoint | ||
| bool | 0x01 | 1 | value 范围:0x00/0x01 | ||
| value | 0x02 | 4 | 对应 int 类型,大端表示 | ||
| string | 0x03 | N | 对应于具体字符串 | ||
| enum | 0x04 | 1 | 枚举类型,范围 0-255 | ||
| bitmap | 0x05 | 2001/2/4 | 长度大于 1 字节时,大端表示 | ||
| len | 2 | 长度对应 value 的字节数 | |||
| value | 1/2/4/N | hex 表示,大于 1 字节采用大端传输 | |||
- 低功耗蓝牙 Mesh 适合传输短数据,例如开关、亮度、色温等 value、bool、enum、bitmap 类型的 DP 数据。
- 低功耗蓝牙 Mesh 不适合传输长数据。例如
len大于 4 字节的 raw 或者 string 类型的 DP 数据。len越长,意味着在蓝牙 Mesh 网络中传输需要更多的分包、更长的时间、更低的成功率。如果必须要传输长数据,len不建议超过 40 字节。
通用对接协议
心跳包(CMD-0x00)
-
模组上电后,以 300 ms 的间隔定期发送心跳。收到 MCU 的心跳包回应后,模组会认为 MCU 正常工作。在 MCU 首次(上电或重启)回复心跳包后,模组会向 MCU 查询产品信息。
-
MCU 也可依据此心跳定期检测模组是否正常工作。若模组无心跳下发,则 MCU 可通过模组提供的硬件复位引脚复位模组。
-
模组在获取 MCU 信息之后,正常功耗模式下以 10s 的间隔定期发送心跳。
-
模组在低功耗模式下,低功耗蓝牙 Mesh 设备添加到 Mesh 网络后,无心跳。每次蓝牙 Mesh 模组重启,仅向 MCU 返回当前配网状态信息。
低功耗蓝牙 Mesh 模组在低功耗下无心跳,因此也无法检测 MCU 是否发生重启。
模组发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x00 |
| 4 5 |
2 | 数据长度 | 0x00 0x00 |
| 6 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
MCU 返回
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x00 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status 返回值 | 说明 |
|---|---|
| 0x00 | 仅 MCU 上电后第一次收到模组心跳包后的返回值,模组也可依据这一点判断工作过程中 MCU 是否重启。 |
| 0x01 | 除 MCU 重启后第一次返回 0x00 外,其余均返回 0x01。 |
获取 MCU 信息(CMD-0x01)
- Product key:固定为 8 字节,由涂鸦 IoT 开发平台生成,用于云端记录产品相关信息。
- 产品信息主要是 PID 信息。
模组发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x01 |
| 4 5 |
2 | 数据长度 | 0x00 0x00 |
| 6 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
MCU 返回
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x01 |
| 4 5 |
2 | 数据长度 | 0x00 0x0d |
| 6~18 | 0x0d | Data | 见下表 |
| 19 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
-
Data 格式:
1~8 9~13 PID 保留字段,填充的是 MCU 软件版本号,但模组目前不对该字段做解析,字段保留。 -
示例:55 AA 00 01 00 0D
66 74 62 38 78 32 78 30 31 2E 30 2E 30C0,表示 PID 为ftb8x2x0,MCU 版本 为 1.0.0。
发送模组工作状态(CMD-0x03)
- 模组工作状态:
0x00表示未绑定,0x01表示未绑定且不可以添加,0x02表示已绑定。 - 当模组检测到模组状态发生变化,则主动下发模组的工作状态至 MCU。
模组发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x03 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status | 工作状态说明 | 备注 |
|---|---|---|
| 0x00 | 未绑定 | 可以用手机搜索添加该设备,处于未被 App 绑定的状态 |
| 0x01 | 未绑定且不可以添加 | 设备配网超时后,关闭未配网广播,设备不能再被添加,处于未被 App 绑定的状态 |
| 0x02 | 已绑定 | 处于已经被 App 绑定的状态 |
设备上电后,与 MCU 的主要交互流程如下:

重置模组(CMD-0x04)
将蓝牙模组从当前蓝牙 Mesh 网络移出,解除蓝牙绑定关系,模组变为未绑定状态。
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x04 |
| 4 5 |
2 | 数据长度 | 0x00 0x00 |
| 6 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
示例:55 aa 00 04 00 00 03
模组回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x04 |
| 4 5 |
2 | 数据长度 | 0x00 0x00 |
| 6 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
示例:55 AA 00 04 00 00 03
命令下发(CMD-0x06)
- 功能点信息参考概述中 DP 格式说明部分。
- 命令下发 只包含单条功能点 命令数据单元。
- 命令下发 为异步处理协议,对应于 MCU 的 DP 状态上报,即当下发关灯 DP 时,MCU 通过
0x07命令回复灯状态为关。
模组发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x06 |
| 4 5 |
2 | 数据长度 Len | Len 高 8 位 Len 低 8 位 |
| 6 ~ 6+Len-1 | Len | datapoint | 见下表 |
| 6+Len | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
-
datapoint格式:
只包含单条 DP 数据。1 2 3~4 5~ dp1_id dp1_type dp1_len dp1_data -
示例:55 aa 00 06 00 05
03 01 00 01 0110,表示 MCU 下发的信息是:内容 对应字段 字段取值 03 dp1_id 3 01 dp1_type bool 00 01 dp1_len 1 byte 01 dp1_data true
MCU 返回
无
状态上报(CMD-0x07)
- 功能点参考 DP 格式说明章节。
- 状态上报 可含多个功能点 命令数据单元。
- 状态上报 为异步处理协议,状态上报 触发机制有三类:
- MCU 收到命令下发处理帧时,正确执行相应功能点命令,再通过 状态上报 帧将变化后的功能点状态发送至模组。
- MCU 主动检测到功能点存在变化,将变化后的功能点状态发送至模组。
- MCU 收到状态查询帧时,将所有的功能点状态发送至模组。
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x07 |
| 4 5 |
2 | 数据长度 Len | Len 高 8 位 Len 低 8 位 |
| 6 ~ 6+Len-1 | Len | datapoint | 见下表 |
| 6+Len | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
-
datapoint格式:
和下发不同,上报的 data point 可以包含多个 DP 数据。1 2 3~4 5~ … n n+1 n+2~n+3 n+4 ~ dp_id dp_type dp_len dp_data … dpN_id dpN_type dpN_len dpN_data -
示例:55 aa 00 07 00 05
03 01 00 01 0111
模组返回
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x07 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status 返回值 | 说明 |
|---|---|
| 0x00 | 成功 |
| 0x01 | 失败 |
状态查询(CMD-0x08)
- 状态查询 为异步处理协议,主要用于模组查询 MCU 所有可上报的功能点状态。当 MCU 收到此帧时,通过 CMD
0x07状态上报帧上报功能点状态。 - 状态查询 发送时机主要有两种:
- 模组绑定连接状态下,检查到 MCU 发生重启(通过 心跳 回复判断),查询发送。
- 在 App 中打开对应设备的控制面板时,会触发查询。
模组发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x08 |
| 4 5 |
2 | 数据长度 | 0x00 0x00 |
| 6 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
示例:55 aa 00 08 00 00 07
MCU 返回
无
主动上报带回复(CMD-0x09)
- 功能点参考 DP 格式说明章节。
- 主动上报带回复 可含多个功能点 命令数据单元。
- 主动上报带回复 为阻塞式上报,只有当数据上报成功或者失败后,才会接收下一包数据。如果上一包数据还未回复 MCU 上报结果,此时输入数据会回复繁忙。
- 主动上报带回复 默认将数据上报两次,上报后会通过 CMD-
0x0B回复 MCU。
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x09 |
| 4 5 |
2 | 数据长度 Len | Len 高 8 位 Len 低 8 位 |
| 6 | 1 | 模式 | 0x00 |
| 7 | 1 | TID | 包序号(MCU 自己维护,每次上报累加) |
| 8~8+Len-3 | Len | Data Point | 见下表 |
| 8+Len | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
-
Data Point 格式:(上报的 Data Point 可以包含多个 DP 数据)
1 2 3~4 5~ … n n+1 n+2~n+3 n+4 ~ dp_id dp_type dp_len dp_data … dpN_id dpN_type dpN_len dpN_data
模组返回
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x09 |
| 4 5 |
2 | 数据长度 | 0x00 0x02 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | 超时时间 | 单位:秒 |
| 8 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status 返回值 | 说明 |
|---|---|
| 0x00 | 成功 |
| 0x01 | 上报 busy,稍后再试 |
- 超时时间为 MCU 发送给模组上报消息后,一直等待结果回复的最大时间。如果超过这个时间未接收到回复,MCU 可判断为上报失败。
配置模组(CMD-0x0A)
用于配置模组的一些通用特性。
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x0A |
| 4 5 |
2 | 数据长度 | Len 高 8 位 Len 低 8 位 |
| 6 ~ 6+Len-1 | Len | config_info | 见下表 |
| 6+Len | 1 | CRC8 | 从帧头开始按字节求和,得出的结果对 256 求余 |
示例:55 aa 00 0A 00 03 01 00 64 71
| config_kind | config_params | 描述 | 返回 |
|---|---|---|---|
| 0x01 | timeout(),单位秒 |
功能:设备未配网状态下,上电可被搜索添加的维持时间
|
CMD-0x0A |
| 0x02 | 0x01:开启配网0x00:关闭配网 |
功能:用于立即开启与关闭配网状态 | CMD-0x03,直接返回设备设置后的状态 |
模组回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x0A |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 ~ 6+Len-1 | Len | config_info_ack | 见下表 |
| 6 | 1 | CRC8 | 从帧头开始按字节求和,得出的结果对 256 求余 |
| config_kind | config_params | 描述 |
|---|---|---|
| 0x01 | status(1 字节)
|
返回未配网时配网窗口配置结果 |
主动上报结果回复(CMD-0x0B)
此接口会回复 MCU 需要上报数据的结果,会带有上报的结果,同时也带有上报的具体信息(TID)。如果失败,MCU 可以再重新上报。
模组发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x0B |
| 4 5 |
2 | 数据长度 Len | Len 高 8 位 Len 低 8 位 |
| 6 | 1 | TID | 包序号 |
| 7 | 1 | Status |
|
| 8+Len | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
MCU 返回
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x0B |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 返回值:
|
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
产测相关接口
RF 射频测试(CMD-0x0E)
为了检测出厂后蓝牙模组的射频是否正常工作,需要测试模组的 RSSI 信号强度。
测试工具:通过涂鸦提供的蓝牙信标,发射名称为 ty_mdev 的广播信号。
测试步骤:首先将信标放在距离模组较近(0.5 米左右)的位置,然后通过串口发送该 RF 射频测试指令,模组会搜索蓝牙信标并返回信号强度值。一般,信号强度大于 -70db 认为模组射频工作正常。
模组需要保持非低功耗模式且模组处于非绑定状态。此外,一旦设备被配网且保持上电 15 分钟,设备会永久关闭产测入口。
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x0E |
| 4 5 |
2 | 数据长度 | 0x00 0x00 |
| 6 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
模组回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0x0E |
| 4 5 |
2 | 数据长度 Len | Len 高 8 位 Len 低 8 位 |
| 6 ~ 6+Len-1 | Len | Data | 见下表 |
| 6+Len | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
Data 格式
| Data | 说明 |
|---|---|
| {"ret":true,"rssi":"-55"} | 信号强度为 -55db |
| {"ret":false} | 没有搜索到该信号 |
新下发上报和使能指令
蓝牙 Mesh 标准协议(通用对接固件 key:keyen8gu,版本大于等于 0.2),接入支持本新增功能。
使能时间、新下发和上报命令(CMD-0x10)
- 默认支持时间功能,若不需要使用此命令关闭,关闭后 获取时间 指令无法获取相关信息。
- 默认使用老命令下发
0x06,使能后使用新命令下发0x11。 - 默认上报指令使用
0x07,使能上报指令拆分为0x12(下发回复)和0x13(状态上报)。 - 该配置只需设置一次,支持掉电记忆。
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字(CMD) | 0x10 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | state | 使能标志位 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和,得出的结果对 256 求余 |
| State | 说明 |
|---|---|
| 0x00 | 关闭时间功能和新命令功能 |
| 0x01 | 使能时间功能,关闭新命令功能 |
| 0x02 | 关闭时间功能,使能新命令功能 |
| 0x03 | 使能时间功能,使能新命令功能 |
模组返回
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字(CMD) | 0x10 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | State | 返回的状态值:
|
| 7 | 1 | CRC8 | 从帧头开始按字节求和,得出的结果对 256 求余 |
新命令下发(CMD-0x11)
模组采用新命令下发的前提是需要使能新命令下发,通过使能接口使能后,模组将用此命令发送命令到 MCU。此命令 ack 字段可通知 MCU 是否回复控制指令。
模组发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字(CMD) | 0x11 |
| 4 5 |
2 | 数据长度 | Len 高 8 位 Len 低 8 位 |
| 6 ~ 6+Len-1 | Len | DataPoint | 见下表 |
| 6+Len | 1 | CRC8 | 从帧头开始按字节求和,得出的结果对 256 求余 |
| 1 | 2 | 3 | 4~5 | 6~ |
|---|---|---|---|---|
| ack | dp_id | dp_type | dp_len | dp_data |
ack 表示 MCU 收到命令后是否通过 0x12 指令回复:
0:表示是群控指令,MCU 不需要调用接口回复。1:表示是单控指令,MCU 需要调用接口回复。
示例:55 aa 00 11 00 06 01 03 01 00 01 01 1D,表示 MCU 下发的信息是:
| 1 | 2 | 3 |
|---|---|---|
| 01 | ack | 1(单控指令) |
| 03 | dp_id | 3 |
| 01 | dp_type | bool |
| 00 01 | dp_len | 1 byte |
| 01 | dp_data | true |
MCU 返回
无
新命令下发回复(CMD-0x12)
此命令用于收到命令下发后回复命令,若使能了新命令下发,回复上报只能采用此条指令,原上报指令失效。
命令下发回复为异步处理协议,触发机制有两类:
- MCU 收到命令下发处理帧时,正确执行相应功能点命令,再通过此命令将变化后的功能点状态发送至模组。
- MCU 收到状态查询帧时,将所有的功能点状态发送至模组。
MCU 发送:
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字(CMD) | 0x12 |
| 4 5 |
2 | 数据长度 | Len 高 8 位 Len 低 8 位 |
| 6 ~ 6+Len-1 | Len | DataPoint | 见下表 |
| 6+Len | 1 | CRC8 | 从帧头开始按字节求和,得出的结果对 256 求余 |
Data Point 格式:(和下发不同,上报的 Data Point 可以包含多个 DP 数据)
| 1 | 2 | 3 | 4~5 | … | n | n+1 | n+2~n+3 | n+4 |
|---|---|---|---|---|---|---|---|---|
| dp_id | dp_type | dp_len | dp_data | … | dp_id | dp_type | dp_len | dp_data |
模组返回
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字(CMD) | 0x12 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | State | 返回的状态值:
|
| 7 | 1 | CRC8 | 从帧头开始按字节求和,得出的结果对 256 求余 |
新状态上报命令(CMD-0x13)
新状态上报为异步处理协议,触发机制: MCU 主动检测到功能点存在变化,将变化后的功能点状态发送至模组。
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字(CMD) | 0x13 |
| 4 5 |
2 | 数据长度 | Len 高 8 位 Len 低 8 位 |
| 6 ~ 6+Len-1 | Len | DataPoint | 见下表 |
| 6+Len | 1 | CRC8 | 从帧头开始按字节求和,得出的结果对 256 求余 |
Data Point 格式:(和下发不同,上报的 Data Point 可以包含多个 DP 数据)
| 1 | 2 | 3 | 4~5 | … | n | n+1 | n+2~n+3 | n+4 |
|---|---|---|---|---|---|---|---|---|
| dp_id | dp_type | dp_len | dp_data | … | dp_id | dp_type | dp_len | dp_data |
模组返回
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字(CMD) | 0x13 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | State | 返回的状态值:
|
| 7 | 1 | CRC8 | 从帧头开始按字节求和,得出的结果对 256 求余 |
低功耗功能附加协议
使能低功耗功能(CMD-0xE5)
低功耗实现原理:MCU 通过三极管/MOS 管控制给蓝牙模组上电断电实现低功耗,同时设置进入低功耗模式后,设备上电会减少不必要的指令交互,快速完成初始化,以减少每次唤醒时间。流程参考下图:
对电路设计的要求:
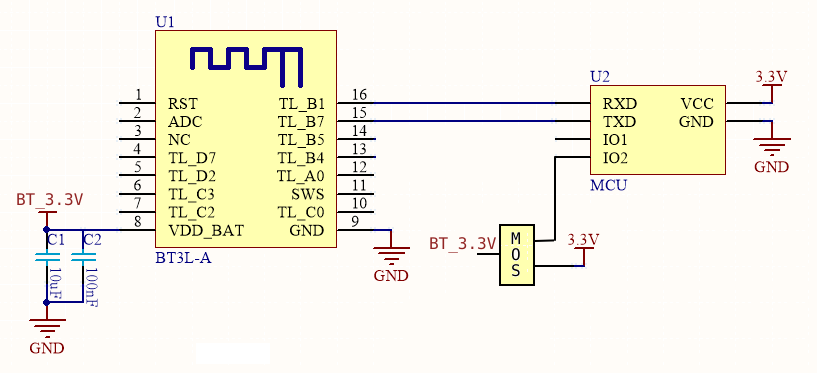
MCU 上报数据注意事项:每次唤醒根据上报 DP 的长度来决定保持上电时长,(dp.len + 3) ÷ 4 × 400ms。
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xE5 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Data | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
Data 格式
| Data | 说明 |
|---|---|
| 0x00 | 关闭低功耗功能 |
| 0x01 | 打开低功耗功能 |
模组回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xE5 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status 返回值 | 说明 |
|---|---|
| 0x00 | 设置成功 |
| 其他 | 设置失败 |
预控和 beacon 遥控器协议
使能预控和 beacon 遥控器(CMD-0xA1)
- 预控和遥控器默认不使能,需要通过此命令打开对应功能。
- 使能遥控器后,模组上电 60 秒内允许遥控器配对,60 秒后禁止遥控器配对。
- 遥控器最大配对数量为 5。若超出遥控器配对上限,会循环顶替,即最后一个配对的遥控器顶替第一个配对的遥控器。
- 该配置将永久存储,只需设置一次,支持掉电记忆。
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xA1 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Data | 见下表 |
| 6 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
Data 格式
| Data | 说明 |
|---|---|
| 0x00 | 关闭预控和 beacon 遥控器功能 |
| 0x01 | 打开 beacon 遥控器功能 |
| 0x02 | 打开预控功能 |
| 0x03 | 打开预控和 beacon 遥控器功能 |
模组回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xA1 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status 返回值 | 说明 |
|---|---|
| 0x00 | 设置成功 |
| 其他 | 设置失败 |
Beacon 遥控器数据通知(CMD-0xB0)
该服务的前提是需要使能 beacon 遥控器功能。
模组发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB0 |
| 4 5 |
2 | 数据长度 | Len 高 8 位 Len 低 8 位 |
| 6 | len | Data | 见下表 |
| 6+len | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
Data 格式
| Data | 长度 | 说明 |
|---|---|---|
| Data[0~5] | 6 | 配对的遥控器 MAC 地址 |
| Data[6] | 1 | 数据长度 |
| Data[7] | 1 | DPID(固定值:0x0b) |
| Data[8] | 1 | DP TYPE+DP LEN(固定值:0x07) |
| Data[9] | 1 | ID |
| Data[10~15] | 6 | beacon 遥控器控制码表 |
MCU 回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB0 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status 返回值 | 说明 |
|---|---|
| 0x00 | 设置成功 |
| 其他 | 设置失败 |
预控数据通知(CMD-0xA2)
该服务的前提是需要使能预控功能。
模组发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xA2 |
| 4 5 |
2 | 数据长度 | Len 高 8 位 Len 低 8 位 |
| 6 | len | Data | 见下表 |
| 6 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
Data 格式
| Data | 长度 | 说明 |
|---|---|---|
| Data[0] | 1 | 预控命令字 |
| Data[1~12] | 12 | 预控参数 |
MCU 回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB0 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status 返回值 | 说明 |
|---|---|
| 0x00 | 设置成功 |
| 其他 | 设置失败 |
Mesh 特有协议
使用通用对接开发的感应灯产品,产品正常使用时,感应到人移动时,会上报有人,同时通过互传指令通知组内其他灯亮灯。此时网络内会有大量广播包,如果当前正在进行 OTA 升级,会影响升级的成功率。因此建议在升级时控制整个场所的人流量,确保不会触发有人导致网络风暴,或者开发产品时,预留控制命令,可以控制关闭感应,升级时关闭所有设备的感应,升级成功后再手动打开。
Mesh 互传使能(CMD-0xB1)
-
App 限制:v3.20 及以上。仅 v3.20 及以上版本的 App 支持此功能。
-
MCU 在使用 CMD
0XB1指令使能模组的互传功能后,模组会从云端申请 8 个发布消息的地址pub_address存储在模组中,与此同时快速配网失效。快速配网能达到平均 3~5 秒添加一个设备,非快速配网需要 10 秒左右添加一个设备。 -
使用 8 个
pub_address实现设备与设备之间的本地联动的方法如下: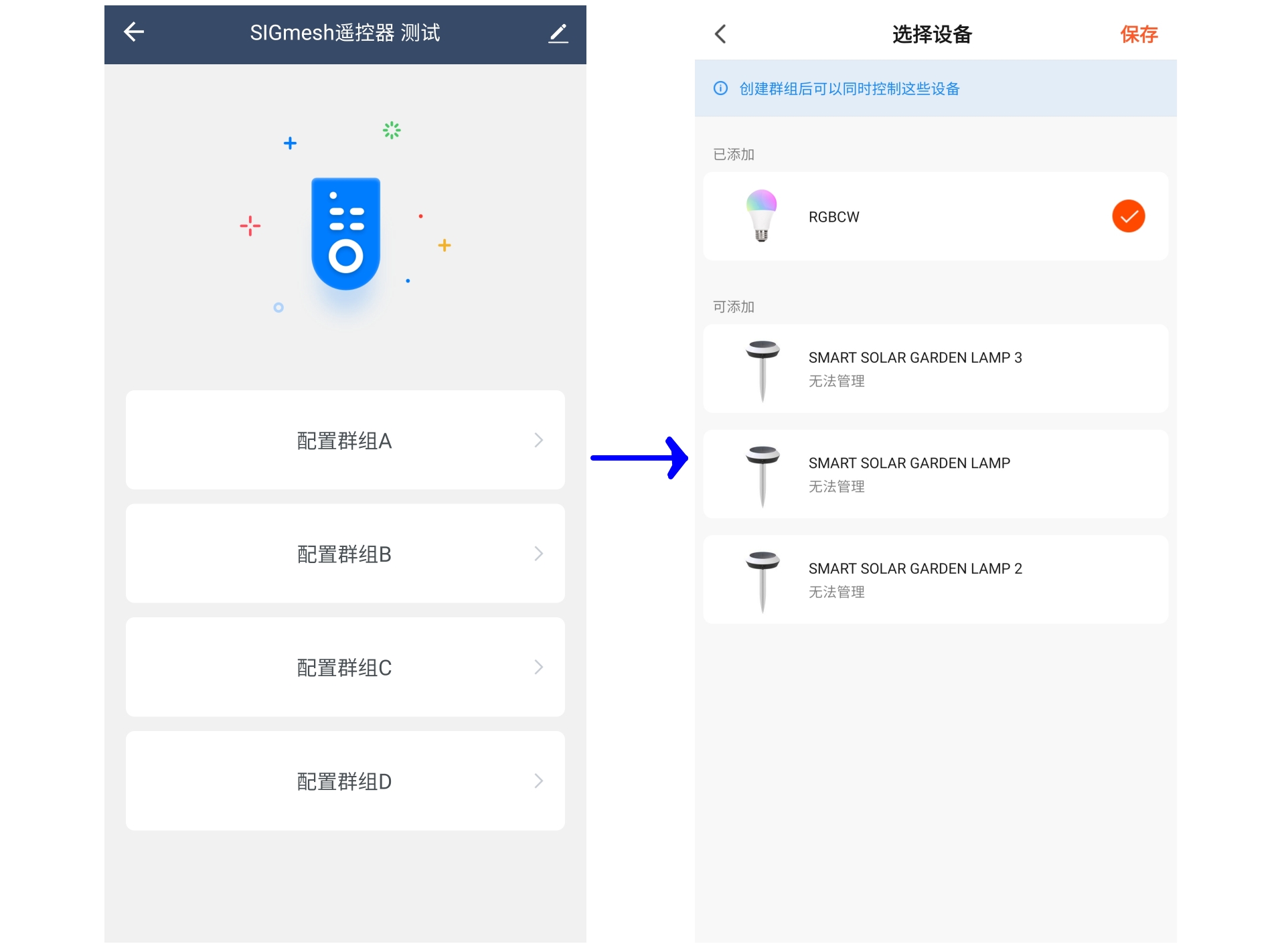
如左图所示,遥控器的主页面,单击 配置群组 A 打开右边的群组管理页面,将灯加入或移除群组 A。
群组 A 的地址即 8 个
pub_address中的一个。在 App 上建立本地联动的步骤:
- App 从云端获取群组 A 对应的
pub_address。 - App 从云端获取已经在群组 A 中的设备列表,以及可支持加入到群组 A 的设备列表。
- 用户单击设备,App 向选中设备发送添加或移除群组 A 的命令,完成关联或解除关联。
本地联动实施策略是:
- 按动遥控器的开关按钮。
- 遥控器利用 互传命令,将目的地址写为对应的
pub_address,发送灯泡的开关功能点。 - 属于对应群组(群组地址 =
pub_address)的灯泡,收到遥控器发来的控制命令,进行开关切换。
- App 从云端获取群组 A 对应的
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB1 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Data | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
Data 格式
| Data | 说明 |
|---|---|
| 0x00 | 关闭本地互传 |
| 0x01 | 使能本地互传 |
模组回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB1 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status 返回值 | 说明 |
|---|---|
| 0x00 | 设置成功 |
| 其他 | 设置失败 |
Mesh 互传(CMD-0xB2)
蓝牙 Mesh 的核心功能是节点与节点互相通信,以实现本地应用的联动。
能充分发挥该命令价值的前提是发送方提前获取接收方的地址,支持以下四种方法:
- 方法一:发送方在被绑定添加时,单独给其分配 8 个发布消息的地址
pub_address,将被控对象按需分配到这 8 个群组中。例如,带有 8 个分组功能的遥控器。 - 方法二:发送的命令为广播命令,目的地址填写:
0xFFFF。 - 方法三:发送方 读取自身所在群组的地址,将该地址作为目的地址,可以实现同一组内的设备联动。例如,停车场感应灯,一个灯感应触发一排灯响应。
- 方法四:借助 App 的控制面板,通过 DP 将被控对象目的地址传给发送方。
注意事项:
- 当前版本 v0.9 的 Mesh 通用对接固件,只支持方法二和方法四。
- 方法三将在 v1.0 版本支持。
- 方法四将在 v1.1 版本支持。v1.1 会增加 MCU 通信协议,支持以下功能:
-
用于设备向群组发布/发送命令,也称这 8 个地址为:pub_address。
-
支持 获取设备本身所在的群组地址。
-
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB2 |
| 4 5 |
2 | 数据长度 | Len 高 8 位 Len 低 8 位 |
| 6 | N | Data | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
Data 格式
| Data 序号 | 长度 | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 目的地址 | 大端表示 可以填写 节点地址、组地址或者广播地址(0xFFFF) |
| 2~N | N-1 | DPs 数据 | DPs 格式参考 状态上报(CMD-0x07) 中 data point 格式 |
获取 8 个 PUB_ADDRESS(CMD-0xB3)
MCU 获取存储在 Mesh 模组中的 8 个发布消息的地址 pub_address。
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB3 |
| 4 5 |
2 | 数据长度 | 0x00 0x00 |
| 6 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
模组回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB3 |
| 4 5 |
2 | 数据长度 Len | Len 高 8 位 Len 低 8 位 |
| 6 ~ 6+Len-1 | Len | Data | 见下表 |
| 6+Len | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
Data 格式
| Data 序号 | 长度 | 字段 | 说明 |
|---|---|---|---|
| 1 | 1 | adr_num | 获取 pub_address 的数量
adr_num 为 8 时,后面还有 16 字节的 8 个 pub_address,格式为:adr1 adr2 ... adr8(每个群组地址为 2 个字节) |
| 2~17 | 16 | pub_address | adr1 adr2 ... adr8(每个群组地址为 2 个字节,大端) |
获取自身所属群组(CMD-0xB4)
支持查询所属群组,常用于停车场雷达灯商业照明方案。例如,将每排灯分别加入同一个群组,一排灯中任何一个灯感应到车辆,向全组发送开灯指令。
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB4 |
| 4 5 |
2 | 数据长度 | 0x00 0x00 |
| 6 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
模组回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB4 |
| 4 5 |
2 | 数据长度 Len | Len 高 8 位 Len 低 8 位 |
| 6 ~ 6+Len-1 | Len | Data | 见下表 |
| 6+Len | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
Data 格式
| Data 序号 | 长度 | 字段 | 说明 |
|---|---|---|---|
| 1 | 1 | adr_num | 获取群组地址的数量
adr_num 为 8 时,后面还有 16 字节的 8 个群组地址,格式为:adr1 adr2 ... adr8(每个群组地址为 2 个字节)注意:当 |
| 2~17 | 16 | pub_address | adr1 adr2 ... adr8(每个群组地址为 2 个字节,大端) |
本地对码(CMD-0xB5)
根据对码的时候是否要借助手机 App,涂鸦体系的遥控器产品与被控设备之间的对码方式有两种:
- 线上对码,参考 CMD
0xB1 - 线下对码
线上和线下的区别是:对码的时候是否要借助手机 App。
涂鸦体系遥控器与被控设备的线下对码一般操作方式为:
- 通过按键长按/上下电等外部事件触发,让被控设备进入待对码状态(CMD
0xB6)。 - 通过长按/组合按键等外部事件触发,让遥控器开始发送对码指令(CMD
0xB5)。 - 被对码成功的设备会闪烁指示灯,提示对码成功。
- 对码成功后:遥控器设备可以向
pub_address地址发布消息/命令(利用 CMD0xB2)。被对码设备(如灯),可以接收到发送到pub_address地址的消息。如果希望 MCU 和蓝牙通用对接设备作为被对码设备,请参考 CMD0xB6。
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB5 |
| 4 5 |
2 | 数据长度 | Len 高 8 位 Len 低 8 位 |
| 6 | Len | Data | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
Data 格式
| 字段 | 取值 | 说明 |
|---|---|---|
| data[0] | 0x00 0x01 |
unpair pair |
| data[1] | address type |
|
模组回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB5 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status 返回值 | 说明 |
|---|---|
| 0x00 | 成功 |
| 其他 | 失败 |
开启本地对码时间窗(CMD-0xB6)
使用 CMD 0xB5 命令时,设备作为遥控器身份来使用,可以对其他设备对码和控制。使用 CMD 0xB6 命令时,设备作为被对码设备,可以被其他遥控器对码并被控制。一般情况下,一个设备不会既做遥控器,又做被对码设备,当然不排除特殊需求,这种双重身份也是支持的。
由于对码时间窗一般不会一直开启,因此增加 CMD 0xB6 来启动开启对码时间窗,并可以设置该时间窗的时间长短。这样,可以让其他遥控器只有在该时间窗内才能与设备对码。例如:
- 球泡灯:每次重新上电,开启对码时间窗 10s。
- 排插:每次长按子插按钮,开启该子插的对码时间窗 10s。
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB6 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Data | 时间窗的值,单位是秒,1 字节 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
模组回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB6 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status 返回值 | 说明 |
|---|---|
| 0x00 | 成功 |
| 0x01 | 失败 |
| 0x02 | 超时关闭 |
| 0x03 | 被对码 |
喜好收藏功能设置(CMD-0xB7)
喜好收藏功能设置,是遥控器设备对支持喜好收藏功能的被控设备(如涂鸦通用版本球泡灯)来使用的命令。当被控设备收到喜好收藏命令时,会记录当前设备状态。当被控设备收到喜好执行命令时,会提取喜好收藏,并进行加载执行。默认最多支持 4 组收藏。
常见的应用场景是:将智能家具中的一组设备,分别调节到目标状态,然后执行收藏操作。之后如果想要一键恢复之前收藏的状态,可以实施喜好执行命令。
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB7 |
| 4 5 |
2 | 数据长度 | Len 高 8 位 Len 低 8 位 |
| 6 | Len | Data | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
Data 格式
| 字段 | 取值 | 说明 |
|---|---|---|
| data[0] | 0x01 0x02 |
喜好收藏 喜好执行 |
| data[1] | 收藏 ID (0x00~0x03) | 总共支持 4 组喜好,编号分别是:0,1,2,3 |
| data[2] | address type |
|
模组回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB7 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status 返回值 | 说明 |
|---|---|
| 0x00 | 成功 |
| 其他 | 失败 |
喜好收藏功能被设置通知(CMD-0xB8)
模组发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB8 |
| 4 5 |
2 | 数据长度 | 0x00 0x02 |
| 6 | 2 | Data | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
Data 格式
| 字段 | 取值 | 说明 |
|---|---|---|
| data[0] | 0x01 0x02 |
喜好收藏 喜好执行 |
| data[1] | id (0x00~0x03) | 总共支持 4 组喜好,编号分别是:0,1,2,3 |
MCU 回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xB8 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status 返回值 | 说明 |
|---|---|
| 0x00 | 成功 |
| 其他 | 失败 |
SIG MODEL 透传-发送(CMD-0xBC)
命令 CMD 0xBC、0xBD、0xBE 和 0xBF 属于特高级命令,一般应用场景不会用到,尝试使用这些命令的前提是充分理解 Mesh 的数据模型以及涂鸦体系产品的数据模型。
该命令可以直接让 MCU 和蓝牙向目标地址发送标准 Mesh Model 数据,例如:使用 MCU 和蓝牙做的遥控器,控制涂鸦通用版本灯的开关(需要合成发送标准的 on/off model)、亮度、颜色等。
涂鸦内部使用的标准 model 命令
| model | 适用 |
|---|---|
| Generic OnOff Model | 照明产品的开关、电工产品的开关 |
| Light Lightness Model | 照明亮度 |
| Light CTL Temperature Model | 照明色温 |
| Light HSL Model | 彩光(DP 是 HSV 颜色模型,传输采用 HSL 颜色模型,传到 MCU 是 HSV 颜色模型) |
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xBC |
| 4 5 |
2 | 数据长度 | Len 高 8 位 Len 低 8 位 |
| 6 | Len | Data | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
Data 格式
| 字段 | 取值 | 说明 |
|---|---|---|
| data[0~1] | dst_address 参数,采用 2 字节的大端格式表示 | 命令的目的地址 |
| data[2~3] | opcode 参数,采用 2 字节的大端格式表示 | 设备通信用的命令字,请参考 蓝牙官网 了解详情 |
| data[4] | is_rsp (0 = no; 1 = is rsp) | 该命令是否是回复命令 |
| data[5] | cmd_params_len | 该命令中的参数部分长度 |
| data[6~n] | cmd_params | 该命令的参数 |
模组回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xBC |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status 返回值 | 说明 |
|---|---|
| 0x00 | 成功 |
| 其他 | 失败 |
SIG MODEL 透传-接收(CMD-0xBD)
命令 CMD 0xBC、0xBD、0xBE 和 0xBF 属于特高级命令,一般应用场景不会用到,尝试使用这些命令的前提是充分理解 Mesh 的数据模型以及涂鸦体系产品的数据模型。
该命令可以让 MCU 和蓝牙接收遥控器发来的标准 Mesh Model 数据。例如,使用 MCU 和蓝牙做的灯,想要被涂鸦通用版本遥控器控制,遥控器部分命令采用标准 Mesh Model 发送数据。
模组发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xBD |
| 4 5 |
2 | 数据长度 | Len 高 8 位 Len 低 8 位 |
| 6 | Len | Data | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
Data 格式
| 字段 | 取值 | 说明 |
|---|---|---|
| data[0~1] | src_address 参数,采用 2 字节的大端格式表示 | 命令的源地址 |
| data[2~3] | dst_address 参数,采用 2 字节的大端格式表示 | 命令的目的地址 |
| data[4~5] | opcode 参数,采用 2 字节的大端格式表示 | 设备通信用的命令字,请参考 蓝牙官网 了解详情 |
| data[6] | is_ack (0 = no; 1 = need ack) | 该命令是否需要回复 |
| data[7] | cmd_params_len | 该命令中的参数部分长度 |
| data[8~n] | cmd_params | 该命令的参数 |
MCU 回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xBD |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status 返回值 | 说明 |
|---|---|
| 0x00 | 成功 |
| 其他 | 失败 |
VENDOR 透传-发送(CMD-0xBE)
命令 CMD 0xBC、0xBD、0xBE 和 0xBF 属于特高级命令,一般应用场景不会用到,尝试使用这些命令的前提是充分理解 Mesh 的数据模型以及涂鸦体系产品的数据模型。
该命令可以直接让 MCU 和蓝牙向目标地址发送标准 Vendor Mesh 数据。例如,使用 MCU 和蓝牙做的遥控器,去控制涂鸦通用版本灯的场景切换。需要借助 Vendor 通道,发送遥控器协议指令。
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xBE |
| 4 5 |
2 | 数据长度 | Len 高 8 位 Len 低 8 位 |
| 6 | Len | Data | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
Data 格式
| 字段 | 取值 | 说明 |
|---|---|---|
| data[0~1] | dst_address,采用 2 字节的大端格式表示 | 命令的目的地址 |
| data[2] | is_rsp (0 = no; 1 = is rsp) | 该命令是否是回复命令 |
| data[3] | cmd_params_len | 该命令中的参数部分长度 |
| data[4~n] | cmd_params | 该命令的参数 |
模组回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xBE |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status 返回值 | 说明 |
|---|---|
| 0x00 | 成功 |
| 其他 | 失败 |
VENDOR 透传-接收(CMD-0xBF)
命令 CMD 0xBC、0xBD、0xBE 和 0xBF 属于特高级命令,一般应用场景不会用到,尝试使用这些命令的前提是充分理解 Mesh 的数据模型以及涂鸦体系产品的数据模型。
该命令可以让 MCU 和蓝牙接收遥控器发来的标准 Vendor Model 数据。例如,使用 MCU 和蓝牙做的灯,想要被涂鸦通用版本遥控器控制。遥控器部分命令采用 Vendor Model 发送数据。
模组发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xBF |
| 4 5 |
2 | 数据长度 | Len 高 8 位 Len 低 8 位 |
| 6 | Len | Data | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
Data 格式
| 字段 | 取值 | 说明 |
|---|---|---|
| data[0~1] | src_address,采用 2 字节的大端格式表示 | 命令的源地址 |
| data[2~3] | dst_address,采用 2 字节的大端格式表示 | 命令的目的地址 |
| data[4] | is_ack (0 = no; 1 = need ack) | 该命令是否需要回复 |
| data[5] | cmd_params_len | 该命令中的参数部分长度 |
| data[6~n] | cmd_params | 该命令的参数 |
MCU 回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xBF |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | Status | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
| Status 返回值 | 说明 |
|---|---|
| 0x00 | 成功 |
| 其他 | 失败 |
其他功能
获取时间(CMD-0xD1)
需要固件版本 ≥ 3.0,节点蓝牙模块的时间掉电后不保存,需要重新被同步时间才能恢复正常。节点蓝牙模块被时间同步的时机:手机/网关有设备交互,节点会在交互后自动请求时间,或者节点在上电后,主动向 Mesh 网络中的设备(其他有时间的节点/网关)请求时间。
MCU 发送
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xD1 |
| 4 5 |
2 | 数据长度 | 0x00 0x01 |
| 6 | 1 | 获取分类 | Flag,低 5 位分别指示 Unix、时区、经纬度、日出日落和星期 24 小时计时是否有效例如,0b0001 1111 表示获取 Unix、时区、经纬度、日出日落和星期 24 小时计时信息,后面将把所有这些信息拼接返回 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
模组回复
| 序号 | 长度(字节) | 字段 | 说明 |
|---|---|---|---|
| 0 1 |
2 | 帧头 | 0x55 0xAA |
| 2 | 1 | 版本号 | 0x00 |
| 3 | 1 | 命令字 CMD | 0xD1 |
| 4 5 |
2 | 数据长度 | n |
| 6 | n | 时间数据 | 见下表 |
| 7 | 1 | CRC8 | 从帧头开始按字节求和得出的结果对 256 求余 |
字段说明
| 字段 | 长度 | 说明 |
|---|---|---|
| flag 字段 | 1 字节 | 第一字节对应请求时的 flag。例如,0b0001 1111,低 5 位全为 1,分别表示将要回复 Unix、时区、经纬度、日出日落和星期 24 小时计时字段。 |
| Unix 字段 | 4 字节 | 当 flag 中对应字段为 1,则回复数据包的 Byte2~Byte5 用于表示 Unix 时间。如果该时间字段是 0xFFFFFFFF,意味着设备还没有自己的时间。 |
| 时区字段 | 2 字节 | 时区信息,为实际时区的 100 倍,有符号型。例如,北京东八区为 8 × 100 = 800,西 7.5 区为 -750。 |
| 经纬度字段 | 4 字节 | 经度:东经 23°27′30" = 东经 23.45833°,舍去秒,最大 180.00。实际扩大 100 倍,有符号型。东经 23°27′ 为 2345,西经 23°30′ 为 -2350。纬度的转换方法同经度:北纬 23°27′ 为 2345,南纬 23°30′ 为 -2350。 |
| 日出日落字段 | 4 字节 | 日出时间(2 字节),分钟表示,一天 24 小时,00:00 是第 0 分钟。日落时间(2 字节),分钟表示,一天 24 小时,00:00 是第 0 分钟。 |
| 星期 + 24 小时计时字段 | 3 字节 | 星期(1 字节),星期天 0,星期 1~6 分别为 1~6。当天的 24 小时制时间(2 字节):分钟表示,一天 24 小时,00:00 是第 0 分钟。 |
flag 之后字段的有无,取决于 flag 中对应标位。例如,flag 为 0b00001001,则回复数据字段组成为 flag + 时区字段 + 24 小时计时字段。
该内容对您有帮助吗?
是意见反馈该内容对您有帮助吗?
是意见反馈





