PTZ 控制
更新时间:2023-07-24 05:53:11LLM 副本以 Markdown 格式查看下载 PDF
PTZ(Pan Tilt Zoom)控制在安防监控应用中,代表云台上下左右全方位移动及镜头变倍、变焦控制。
主要功能
| 主要功能 | 功能说明 |
|---|---|
| 基础功能 |
|
| 高级功能 |
|
| 扩展功能 |
|
开发指导
运行环境
-
开发框架
IPC 产品开发包通用功能
-
关联组件
app_user_ptzapp_sys_ptzapp_user_event
使用方法
配置 motor.config 相关能力,调用初始化接口。
初始化流程
TY_SYS_PTZ_PARAM_T ptz_params;
...
//根据需求配置 PTZ 相关能力
...
//初始化 PTZ
ty_user_ptz_start();
数据结构
typedef struct {
int max_pan_step; // maximal pan step
int max_pan_angle; // maximal pan angle
int max_tilt_step; // maximal tilt step
int max_tilt_angle; // maximal tilt angle
int horizon_tilt_step; // horizontal tilt step
int pan_speed; // default pan speed
int tilt_speed; // default tilt speed
int tilt_track; // tilt track support flag
int sleep_pos_def; // sleep position support flag
int defalut_patrol_tmode; // default patrol type(non-/simple patrol)
int pan_reverse; // pan motor reverse flag
int tilt_reverse; // tilt motor reverse flag
char struct_type; // device structure type
TY_GET_OBJECT_COORDINATE_CB get_object_coordinate_cb; // determinate track source
char drv_path[DRV_PATH_NAME_LEN]; // path of PTZ driver
} TY_SYS_PTZ_PARAM_T;
API 说明
初始化 PTZ 模块
/**
* @brief NONE
*
* @return OPERATE_RET
*/
OPERATE_RET ty_user_ptz_start(void);
PTZ 的相关具体配置保存在 motor.config,无需通过函数参数传入。
初始化 PTZ sys 管理模块
/**
* @fn OPERATE_RET ty_sys_ptz_init(TY_SYS_PTZ_PARAM_T* params)
* @brief initialize PTZ component with user defined parameters.
* @param[in] params: user defined parameters' srtuct pointer.
* @param[out] None.
* @retval OPRT_OK: action succeed; OPRT_INVALID_PARM: invaild parameter.
* @attention None.
*/
OPERATE_RET ty_sys_ptz_init(IN CONST TY_SYS_PTZ_PARAM_T* params);
获取当前 PTZ 的运动状态
/**
* @fn int ty_sys_ptz_get_check_state(void)
* @brief check if device in self checking
* @param[in] None
* @param[out] None
* @retval 0: is in self checking; 1: not in self checking.
* @attention None
*/
int ty_sys_ptz_get_check_state(void);
获取当前 PTZ 预设点坐标
/**
* @fn OPERATE_RET ty_sys_ptz_linkpos_get(OUT INT_T *x, OUT INT_T *y)
* @brief get current target position coordinate.
* @param[in] None.
* @param[out] x: target pan pos.
* @param[out] y: target tilt pos.
* @retval OPRT_OK: succeed; OPRT_COM_ERROR: PTZ component is uninitialized.
* @attention None.
*/
int ty_sys_ptz_linkpos_get(int *x, int *y);
获取设备的键控状态
/**
* @fn int ty_sys_ptz_get_key_status(void)
* @brief get keying task state.
* @param[in] None.
* @retval 0: not in keying; 1: in keying.
* @attention None.
*/
int ty_sys_ptz_get_key_status(void);
停止 PTZ 相关线程调度
/**
* @fn void ty_sys_ptz_stop(void)
* @brief stop PTZ component.
* @param[in] None.
* @param[out] None.
* @retval None.
* @attention None.
*/
void ty_sys_ptz_stop(void);
判断设备是否在运动过程中
/**
* @fn OPERATE_RET ty_sys_ptz_get_motion_state(OUT UINT_T *is_move)
* @brief check if PTZ is moving(if md event is caused by PTZ moving).
* @param[in] None.
* @param[out] is_move to store result, 0: still(md event to upload); 1: in move(md event to ignore).
* @retval OPRT_OK: action succeed; OPRT_INVALID_PARM: invaild parameter.
* @attention None.
*/
OPERATE_RET ty_sys_ptz_get_motion_state(OUT UINT_T *is_move);
获取设备当前坐标
/**
* @fn OPERATE_RET ty_sys_ptz_pos(int *pan, int *tilt)
* @brief get PTZ position
* @param[in] None.
* @param[out] pan: current pan step.
* @param[out] tilt: current tilt step.
* @retval OPRT_OK: action succeed; OPRT_INVALID_PARM: invaild parameter.
* @attention None.
*/
OPERATE_RET ty_sys_ptz_pos(int *pan, int *tilt);
使用示例
典型的简易巡航 montor.config 配置如下
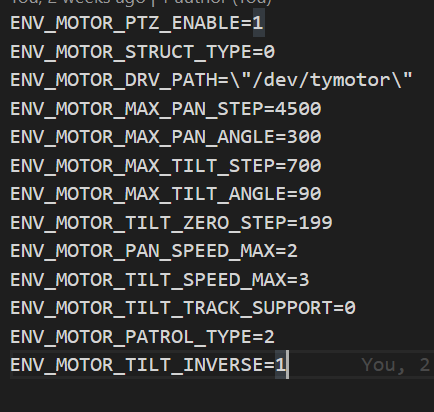
| 配置名 | 值 | 说明 |
|---|---|---|
| ENV_MOTOR_PTZ_ENABLE | 0 或 1 | 是否使能 PTZ
|
| ENV_MOTOR_STRUCT_TYPE | 0 或 1 | PTZ 结构类型
|
| ENV_MOTOR_DRV_PATH | 字符类型 | 设备路径:默认为 /dev/tymotor |
| ENV_MOTOR_MAX_PAN_STEP | 整型 | 水平运动最大步长 |
| ENV_MOTOR_MAX_PAN_ANGLE | 整型 | 水平方向最大运动角度 |
| ENV_MOTOR_MAX_TILT_STEP | 整型 | 垂直方向最大步长 |
| ENV_MOTOR_MAX_TILT_ANGLE | 整型 | 垂直方向最大运动角度 |
| ENV_MOTOR_TILT_ZERO_STEP | 整型 | 垂直方向水平位置时的垂直方向步长 |
| ENV_MOTOR_PAN_SPEED_MAX | 整型 | 水平方向的最大速度 |
| ENV_MOTOR_TILT_SPEED_MAX | 整型 | 垂直方向的最大速度 |
| ENV_MOTOR_TILT_TRACK_SUPPORT | 0 或 1 | 是否支持垂直追踪 |
| ENV_MOTOR_PATROL_TYPE | 0 或 2 | 巡航模式
|
| ENV_MOTOR_TILT_INVERSE | 0 或 1 | 垂直电机电机运动方向控制
|
| ENV_MOTOR_PAN_INVERSE | 0 或 1 | 水平电机电机运动方向控制
|
| ENV_MOTOR_MOTOR_SUP_SLEEP_POS | 0 或 1 | 物理遮罩(隐私位置)支持
|
注意事项
PTZ 组件仅包含业务能力,不包括驱动能力,使用需添加驱动资源。
常见问题
设备在自检的时候可以执行其他操作吗?
不可以。
在逻辑规划中自检属于最高优先级,不可被其他操作打断。模块优先级关系,从高到低依次为:
- 自检
- 全景拼接
- 按键
- 联动点、收藏点
- 巡航
- 追踪
设备断网后还会执行定时巡航任务吗?
会。
实际上在用户下发任务的那一刻,设备就已经收到了定时巡航任务消息。具体流程为:
- (云端)用户下定时任务。
- (设备)收到任务,按照规定时间设置定时器。
- (设备)PTZ 模块收到定时提醒,执行巡航任务。
该内容对您有帮助吗?
是意见反馈该内容对您有帮助吗?
是意见反馈
关注“涂鸦智能”
涂鸦服务尽在掌握

关注“全球智能商业”
第一时间获取物联网资讯




