高级功能
更新时间:2023-07-24 05:53:11LLM 副本以 Markdown 格式查看下载 PDF
PTZ(Pan Tilt Zoom)控制 中的 高级功能 是巡航和追踪。
- 巡航:是指设备在规定时间内通过规定方式进行电机运动。
- 追踪:是指设备能根据物体的移动趋势,自行进行电机运动,使物体一直存在画面中心。
功能说明
巡航
巡航的业务逻辑如图:
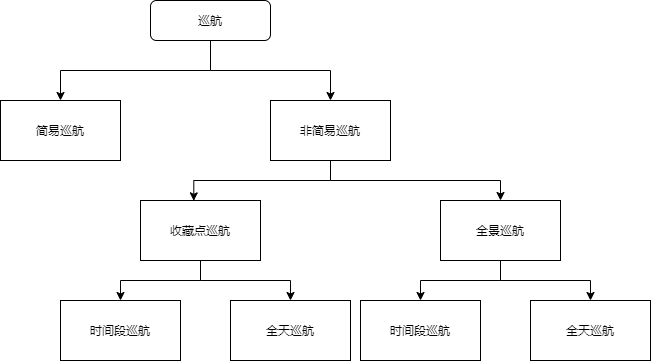
巡航按照业务可以分为两大类:
-
简易巡航:简易巡航是指用户在 App 端配置定时巡航的计划,在到达计划时间时向设备下发 DP,设备收到后转 1 周对 6 个点进行停留一段时间,然后返回巡航前的位置。停留时长可以在面板配置,通过
E_TY_MSG_PTZ_PATROL_STAY_TIME传递给设备。 -
非简易巡航:
按照业务类型划分:
- 全景巡航:设备在水平均分六点上做周而复始的循环转动。需要注意设备如果是无限限位结构,循环的流程为点(1.2.3.4.5.6.1.2…),为有限位结构循环的流程为(1.2.3.4.5.6.5.4…)。
- 收藏点巡航:设备在收藏点之间进行往返循转动。
-
非简易巡航
按照巡航持续时间划分:
- 全天巡航:设备一直持续转动,直到用户关闭巡航开关。
- 时间段巡航:设备在用户设定的时间段之间进行巡航,超出时间段后自行停止。
追踪
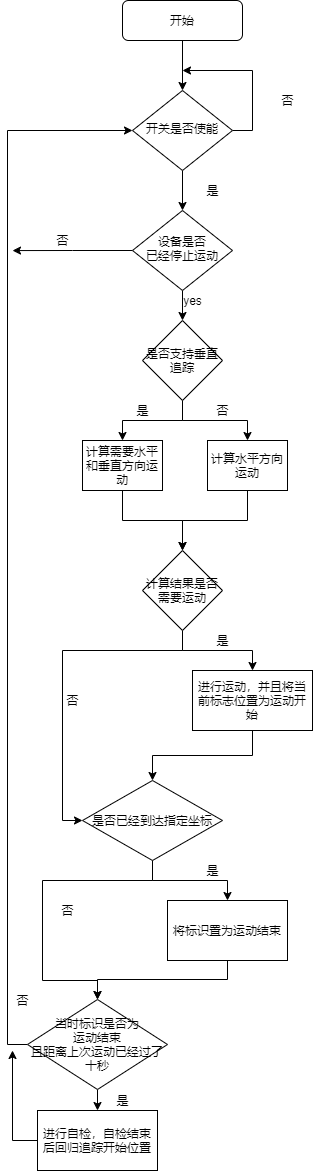
对 PTZ 组件来说外部通过 E_TY_MSG_PTZ_TRACK 消息类型来控制追踪开关使能。目前涂鸦的设备支持垂直追踪和水平追踪,MOTOR_TILT_TRACK_SUPPORT 这个配置项来控制是否开启垂直追踪。一般情况下摇头机和球机都支持水平追踪。
一个完整的追踪流程如下图所示:
该内容对您有帮助吗?
是意见反馈该内容对您有帮助吗?
是意见反馈
关注“涂鸦智能”
涂鸦服务尽在掌握

关注“全球智能商业”
第一时间获取物联网资讯




