T5-E1 模组硬件设计
本文为 T5-E1 模组 使用者提供了产品硬件信息和设计开发参考。通过本文,您可以对该模组有整体认识,对产品的技术参数有明确了解,进而帮助您完成相关功能类产品或设备的应用开发。
产品简介
T5-E1-IPEX 是一个高度集成的单天线单频段 2.4 GHz Wi-Fi 6(IEEE 802.11b/g/n/ax)和蓝牙 5.4 低功耗(Low Energy)双模 IoT 模组。T5-E1-IPEX 采用多外设封装和超低功耗芯片工艺,为 IP 摄像机、HMI 应用、智能锁和其他先进的物联网应用提供高集成度、高效安全性和最低功耗的产品使用环境。
T5-E1 模组内嵌 ARMv8-M Star (M33F) 处理器,主频高达 480MHz,集成 8MB Flash,16MB PSRAM,640KB Share SRAM 和 64KB ROM。支持 USB、UART、SDIO、SPI、I2C、I2S 和 ADC 等接口,支持外接显示屏、摄像头、麦克风、喇叭和 MicroSD 卡等设备。
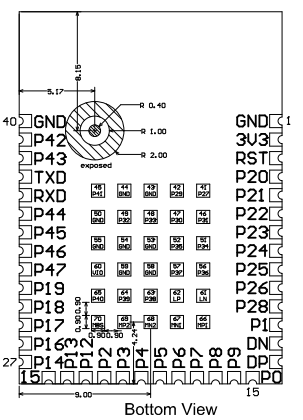
模组外观
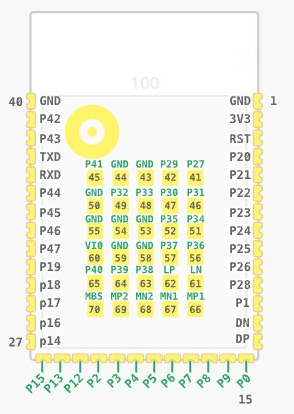
模组引脚
T5-E1 模组共有 70 个引脚,其中 40 个为 LCC 引脚,另外 30 个为 LGA 引脚。
模组 I/O 序号与模组丝印 I/O 名称对应关系:
| 序号 | 名称 | I/O 类型 | 功能 |
|---|---|---|---|
| 1 | GND | P | 电源参考地 |
| 2 | 3V3 | P | 电源引脚 |
| 3 | RST | I | 低电平复位,高电平有效(内部已拉高处理) |
| 4 | P20 | I/O |
|
| 5 | P21 | I/O |
|
| 6 | P22 | I/O |
|
| 7 | P23 | I/O |
|
| 8 | P24 | I/O |
|
| 9 | P25 | I/O |
|
| 10 | P26 | I/O |
|
| 11 | P28 | I/O |
|
| 12 | P1 | I/O |
|
| 13 | DN | I/O | USB D- |
| 14 | DP | I/O | USB D+ |
| 15 | P0 | I/O |
|
| 16 | P9 | I/O |
|
| 17 | P8 | I/O |
|
| 18 | P7 | I/O |
|
| 19 | P6 | I/O |
|
| 20 | P5 | I/O |
|
| 21 | P4 | I/O |
|
| 22 | P3 | I/O |
|
| 23 | P2 | I/O |
|
| 24 | P12 | I/O |
|
| 25 | P13 | I/O |
|
| 26 | P15 | I/O |
|
| 27 | P14 | I/O |
|
| 28 | P16 | I/O |
|
| 29 | P17 | I/O |
|
| 30 | P18 | I/O |
|
| 31 | P19 | I/O |
|
| 32 | P47 | I/O |
|
| 33 | P46 | I/O |
|
| 34 | P45 | I/O |
|
| 35 | P44 | I/O |
|
| 36 | RXD | I/O |
|
| 37 | TXD | I/O |
|
| 38 | P43 | I/O |
|
| 39 | P42 | I/O |
|
| 40 | GND | P | 电源参考地 |
| 41 | P27 | I/O |
|
| 42 | P29 | I/O |
|
| 43 | GND | P | 电源参考地 |
| 44 | GND | P | 电源参考地 |
| 45 | P41 | I/O |
|
| 46 | P31 | I/O |
|
| 47 | P30 | I/O |
|
| 48 | P33 | I/O |
|
| 49 | P32 | I/O |
|
| 50 | GND | P | 电源参考地 |
| 51 | P34 | I/O |
|
| 52 | P35 | I/O |
|
| 53 | GND | P | 电源参考地 |
| 54 | GND | P | 电源参考地 |
| 55 | GND | P | 电源参考地 |
| 56 | P36 | I/O |
|
| 57 | P37 | I/O |
|
| 58 | GND | P | 电源参考地 |
| 59 | GND | P | 电源参考地 |
| 60 | VIO | AO | GPIO LDO output |
| 61 | LN | AO | Audio left channel negative output |
| 62 | LP | AO | Audio left channel positive output |
| 63 | P38 | I/O |
|
| 64 | P39 | I/O |
|
| 65 | P40 | I/O |
|
| 66 | MP1 | AO | Microphone 1 positive input |
| 67 | MN1 | AO | Microphone 1 negative input |
| 68 | MN2 | AO | Microphone 2 negative input |
| 69 | MP2 | AO | Microphone 2 positive input |
| 70 | MBS | AO | Microphone bias output |
- ADC 口输入电平最大值为 1.1V,外部分压电阻建议使用 MΩ 级别,同时靠近 ADC 口放置对地 100nF 电容滤波。
P表示电源引脚。I/O表示输入输出引脚。AI表示模拟信号输入引脚。AO表示模拟信号输出引脚。
接口说明
UART
管脚描述
本模组提供 3 路 UART 接口:
-
串口 0:可用于 MCU 对接,使用涂鸦通用对接协议,其默认波特率为 115200 bps。
-
串口 1:普通串口,用于外设扩展。
-
串口 2:普通串口,用于外设扩展。
管脚号 信号名称 功能描述 36 DL_UART_RX 串口 0,可做下载口,接收数据 37 DL_UART_TX 串口 0,可做下载口,发送数据 12 UART1_RX 串口 1 接收数据 15 UART1_TX 串口 1 发送数据 45 UART2_TX 串口 2 发送数据 65 UART2_RX 串口 2 接收数据
模组与 MCU 串口通信
-
模组与 3.3V MCU 配合处理模式
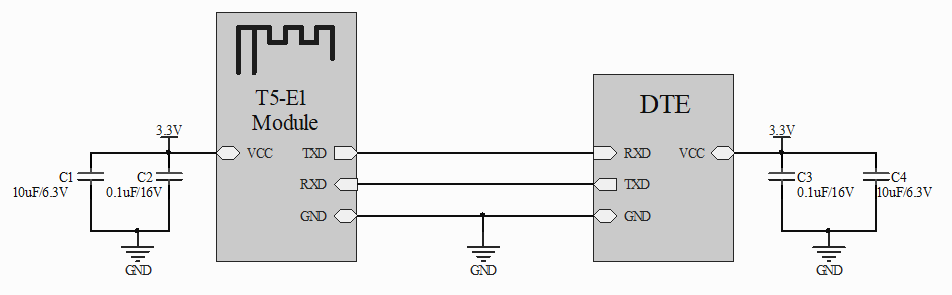
-
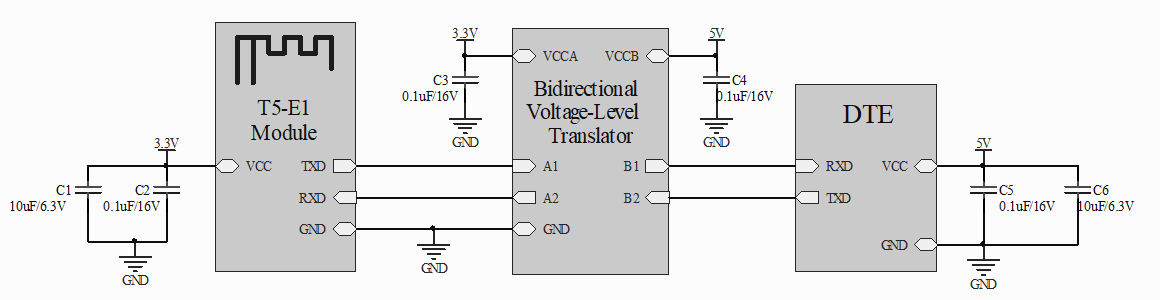
模组与 5V MCU 配合处理模式
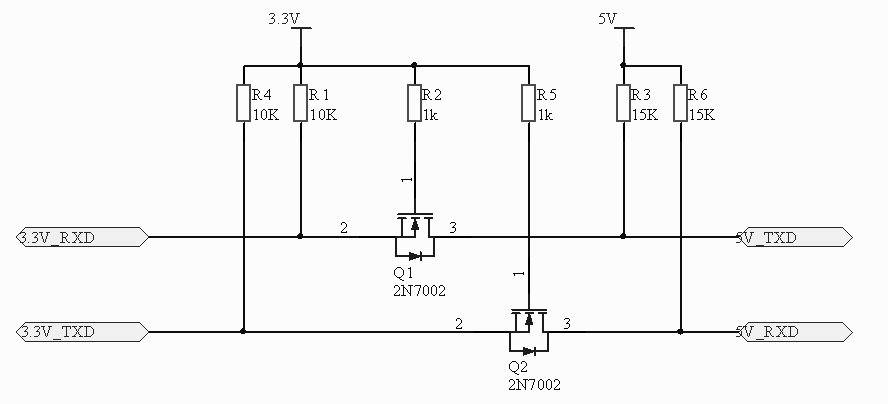
下图中,电平转换器可以通过双向电平转换芯片实现,也可通过 MOS 管或三极管电路实现。
电平转换电路参考
-
NMOS 管转换电路参考,本示例利用 NMOS 管和内嵌的体二极管实现数据的双向通信。
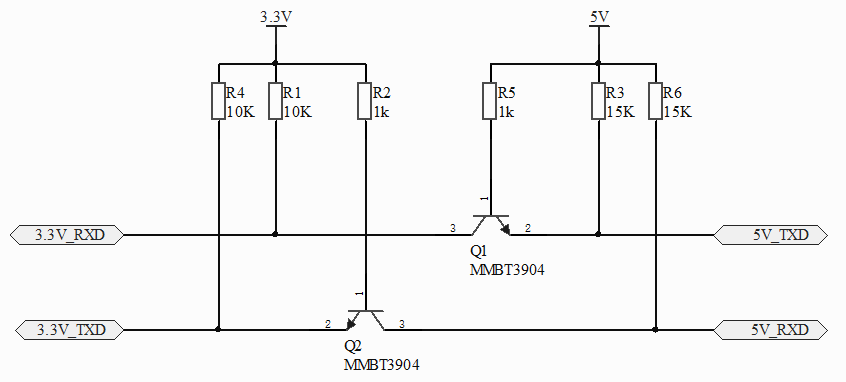
-
NPN 三极管转换电路参考,本示例利用 NPN 三极管实现数据的单向通信。
串口 1、2 与串口 0 的连接方式相同,参考上图。
电路设计要求
串口走线需尽量短,周围包地处理,远离射频和周期性信号线。
USB
管脚描述
本模组具有 USB2.0 接口。
| 管脚号 | 信号名称 | 功能描述 |
|---|---|---|
| 13 | USB_DN |
USB 差分数据 DN,支持高速和全速模式 |
| 14 | USB_DP |
USB 差分数据 DP,支持高速和全速模式 |
接口应用
-
MCU 对接

-
Micro-USB 连接器
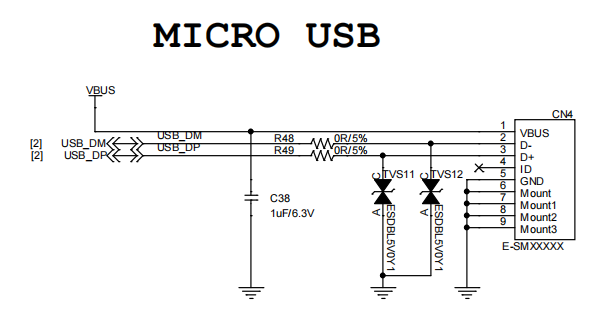
电路设计要求
- USB 走线周围需要包地处理,走 90 欧姆的阻抗差分线,保持平行等长。
- USB 走线远离电源、射频及其他敏感信号,建议内层差分走线且上下左右立体包地。
- MCU 与模组间串联一个共模电感,防止 USB 信号产生 EMI 干扰。
- 外接 Micro-USB 接口时,USB 的 TVS 管应尽量靠近 USB 接口,寄生容值 < 2 pF。
SPI
T5-E1 有两组 SPI 接口,管脚描述:
| 管脚号 | 信号名称 | 功能描述 |
|---|---|---|
| 26 | SPI0_CSN | GPIO15,SPI0 片选信号 |
| 28 | SPI0_MOSI | GPIO16,SPI0 主输出、从输入 |
| 29 | SPI0_MISO | GPIO17,SPI0 主输入、从输出 |
| 27 | SPI0_SCK | GPIO14,SPI0 接口时钟信号 |
| 22 | SPI1_CSN | GPIO3,SPI1 片选信号 |
| 21 | SPI1_MOSI | GPIO4,SPI1 主输出、从输入 |
| 20 | SPI1_MISO | GPIO5,SPI1 主输入、从输出 |
| 23 | SPI1_SCK | GPIO2,SPI1 接口时钟信号 |
SPI 接口电气特性及接口应用
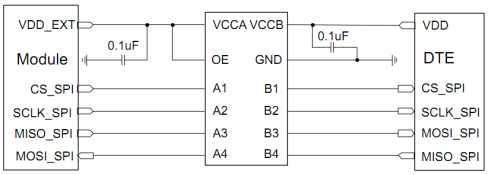
本模组的 SPI 接口电平为 3.3V。若您的 MCU 系统电平为 5V,则需在模组和 MCU 之间增加电平转换器。推荐使用一个支持 SPI 数据速率的电平转换器。
参考电路如下图所示:
QSPI
T5-E1 有两组 QSPI 接口,管脚描述:
| 管脚号 | 信号名称 | 功能描述 |
|---|---|---|
| 6 | QSPI0_SCK | GPIO22,QSPI0 时钟信号 |
| 7 | QSPI0_CS | GPIO23,QSPI0 使能信号 |
| 8 | QSPI0_IO0 | GPIO24,QSPI0 数据位 0 |
| 9 | QSPI0_IO1 | GPIO25,QSPI0 数据位 1 |
| 10 | QSPI0_IO2 | GPIO26,QSPI0 数据位 2 |
| 41 | QSPI0_IO3 | GPIO27,QSPI0 数据位 3 |
| 18 | QSPI1_IO3 | GPIO7,QSPI1 数据位 3 |
| 19 | QSPI1_IO2 | GPIO6,QSPI1 数据位 2 |
| 20 | QSPI1_IO1 | GPIO5,QSPI1 数据位 1 |
| 21 | QSPI1_IO0 | GPIO4,QSPI1 数据位 0 |
| 22 | QSPI1_CS | GPIO3,QSPI1 使能信号 |
| 23 | QSPI1_SCK | GPIO2,QSPI1 时钟信号 |
如果客户需要对已上板的外置 Flash 进行烧录,硬件设计上需要将 T5 与外置 Flash 不共电或者做隔离,相应烧录引脚预留测点(3V3、GND、QSPI_IO0、QSPI_IO1、QSPI_IO2、QSPI_IO3、QSPI_CS、QSPI_SCK)。使用烧录器对外置 Flash 烧录时需要确保 Flash 单独上电,T5 未上电。
I2C
T5-E1 有两组 I2C 接口,管脚描述如下:
| 管脚号 | 信号名称 | 功能描述 |
|---|---|---|
| 4 | I2C0_SCL | GPIO20,I2C0 时钟信号 |
| 5 | I2C0_SDA | GPIO21,I2C0 数据信号 |
| 15 | I2C1_SCL | GPIO0,I2C1 时钟信号 |
| 12 | I2C1_SDA | GPIO1,I2C1 数据信号 |
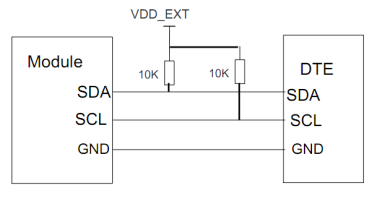
I2C 是一种 IC 之间通信的两线总线。两条信号线,即串行数据(SDA)的和串行时钟(SCL),在连接的设备之间传送信息。每个设备靠唯一的地址来识别,既可作为发送器,也可作为接收器。
接口应用
I2C 总线必须在设备端进行上拉。
I2S
T5-E1 有 3 组 I2S 接口,管脚描述如下:
| 管脚号 | 信号名称 | 功能描述 |
|---|---|---|
| 11 | I2S_MCLK | GPIO28,主时钟信号 |
| 16 | I2S0_DOUT | GPIO9,I2S0 输出信号 |
| 17 | I2S0_DIN | GPIO8,I2S0 输入信号 |
| 18 | I2S0_SYNC | GPIO7,I2S0 同步信号 |
| 19 | I2S0_SCK | GPIO6,I2S0 时钟信号 |
| 32 | I2S2_DOUT | GPIO47,I2S2 输出信号 |
| 33 | I2S2_DIN | GPIO46,I2S2 输入信号 |
| 34 | I2S2_SYNC | GPIO45,I2S2 同步信号 |
| 35 | I2S2_SCK | GPIO44,I2S2 时钟信号 |
| 38 | I2S1_DOUT | GPIO43,I2S1 输出信号 |
| 39 | I2S1_DIN | GPIO42,I2S1 输入信号 |
| 45 | I2S1_SYNC | GPIO41,I2S1 同步信号 |
| 65 | I2S1_SCK | GPIO40,I2S1 时钟信号 |
SDIO
T5-E1 有 1 组 SDIO 接口,管脚描述如下:
| 管脚号 | 信号名称 | 功能描述 |
|---|---|---|
| 20/29 | SDIO_DATA1 | GPIO5/GPIO17,SDIO 数据位 1 |
| 21/28 | SDIO_DATA0 | GPIO4/GPIO16,SDIO 数据位 0 |
| 22/26 | SDIO_CMD | GPIO3/GPIO15,SDIO 命令 |
| 23/27 | SDIO_CLK | GPIO2/GPIO14,SDIO 时钟 |
| 36/30 | SDIO_DATA2 | UART0_RX/GPIO18,SDIO 数据位 2 |
| 37/31 | SDIO_DATA3 | UART0_TX/GPIO19,SDIO 数据位 3 |
接口应用
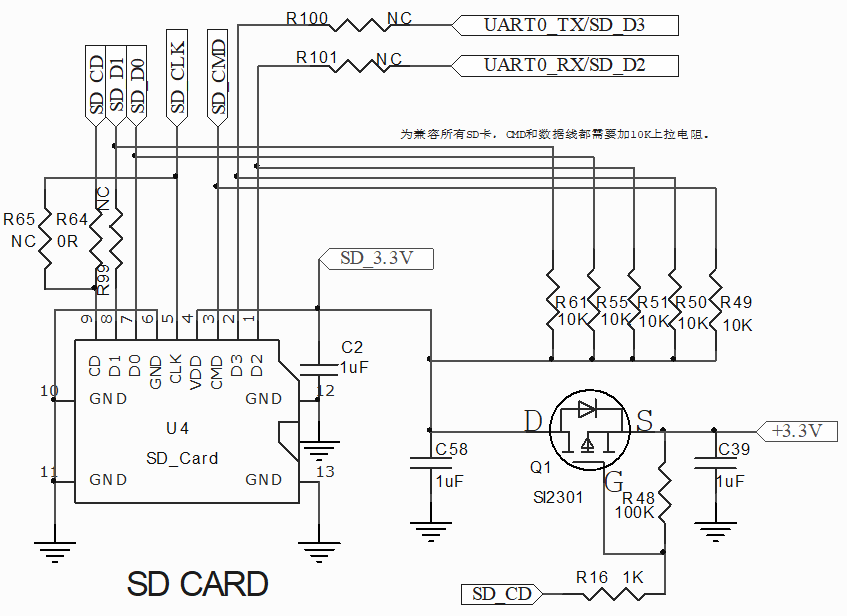
电路设计要求
SD_CLK和 SD 信号线上可以预留串联 22 ohm 电阻,用于解决射频干扰问题。- SD 信号线上预留 0201 33 pF 对地电容位置,用于解决射频干扰问题。
SD_DATA[0:3]和SD_CMD预留上拉电阻,增加总线稳定性。SD_CLK信号单根包地,长度越短越好,控制在 2500 mil 以内,最好在 2000 mil 以内。SD 信号整体包地,避免邻层信号平行。SD_CLK,SD_DATA[0:3]和SD_CMD走线需做等长处理,相差小于 1 mm,总长度不超过 50 mm。- 为确保 ESD 性能,靠近 SD 卡座位置 3V3,
SD_CLK,SD_DATA[0:3]和SD_CMD预留增加 ESD 管,寄生电容低于 15 pF,走线要求先经过 ESD 器件再到模组。
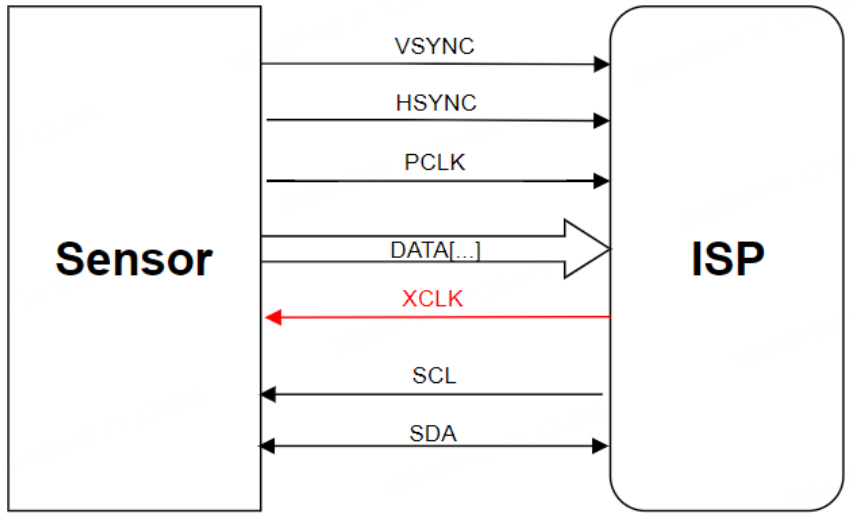
Camera
管脚描述
| 管脚号 | 信号名称 | 功能描述 |
|---|---|---|
| 41 | CIS_MCLK | GPIO27,输出给 Sensor 的驱动时钟 |
| 42 | CIS_PCLK | GPIO29,像素时钟 |
| 46 | CIS_VSYNC | GPIO31,帧同步信号 |
| 47 | CIS_HSYNC | GPIO30,行同步信号 |
| 48 | CIS_PXD1 | GPIO33,像素数据,数据位 1 |
| 49 | CIS_PXD0 | GPIO32,像素数据,数据位 0 |
| 51 | CIS_PXD2 | GPIO34,像素数据,数据位 2 |
| 52 | CIS_PXD3 | GPIO35,像素数据,数据位 3 |
| 56 | CIS_PXD4 | GPIO36,像素数据,数据位 4 |
| 57 | CIS_PXD5 | GPIO37,像素数据,数据位 5 |
| 63 | CIS_PXD6 | GPIO38,像素数据,数据位 6 |
| 64 | CIS_PXD7 | GPIO39,像素数据,数据位 7 |
DVP 需要一组 I2C 接口来配置 Sensor。
接口应用
RGB565
管脚描述
| 管脚号 | 信号名称 | 功能描述 |
|---|---|---|
| 31 | RGB_R7 | GPIO19,RGB 红色分量数据位 7 |
| 4 | RGB_R6 | GPIO20,RGB 红色分量数据位 6 |
| 5 | RGB_R5 | GPIO21,RGB 红色分量数据位 5 |
| 6 | RGB_R4 | GPIO22,RGB 红色分量数据位 4 |
| 7 | RGB_R3 | GPIO23,RGB 红色分量数据位 3 |
| 8 | RGB_G7 | GPIO24,RGB 绿色分量数据位 7 |
| 9 | RGB_G6 | GPIO25,RGB 绿色分量数据位 6 |
| 10 | RGB_G5 | GPIO26,RGB 绿色分量数据位 5 |
| 65 | RGB_G4 | GPIO40,RGB 绿色分量数据位 4 |
| 45 | RGB_G3 | GPIO41,RGB 绿色分量数据位 3 |
| 39 | RGB_G2 | GPIO42,RGB 绿色分量数据位 2 |
| 38 | RGB_B7 | GPIO43,RGB 蓝色分量数据位 7 |
| 35 | RGB_B6 | GPIO44,RGB 蓝色分量数据位 6 |
| 34 | RGB_B5 | GPIO45,RGB 蓝色分量数据位 5 |
| 33 | RGB_B4 | GPIO46,RGB 蓝色分量数据位 4 |
| 32 | RGB_B3 | GPIO47,RGB 蓝色分量数据位 3 |
| 27 | RGB_DCLK | GPIO14,时钟信号 |
| 26 | RGB_DISP | GPIO15,显示开/关 |
| 29 | RGB_HSYNC | GPIO17,行同步信号 |
| 30 | RGB_VSYNC | GPIO18,场同步信号 |
| 28 | RGB_DE | GPIO16,数据使能信号 |
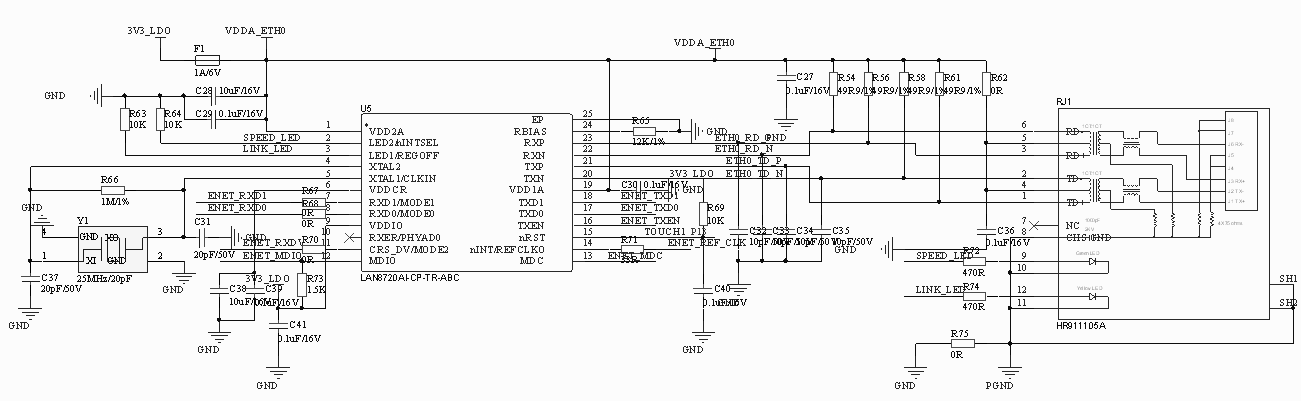
以太网
管脚描述
| 管脚号 | 信号名称 | 功能描述 |
|---|---|---|
| 41 | ENET_PHY_INT | GPIO27,中断信号 |
| 42 | ENET_MDC | GPIO29,总线时钟信号 |
| 48 | ENET_RXD0 | GPIO33,数据接收信号,比特位 0 |
| 49 | ENET_MDIO | GPIO32,输入输出数据信号 |
| 51 | ENET_RXD1 | GPIO34,数据接收信号,比特位 1 |
| 52 | ENET_RXDV | GPIO35,接收数据有效信号 |
| 56 | ENET_TXD0 | GPIO36,数据发送信号,比特位 0 |
| 57 | ENET_TXD1 | GPIO37,数据发送信号,比特位 1 |
| 63 | ENET_TXEN | GPIO38,发送使能信号 |
| 64 | ENET_REF_CLK | GPIO39,参考时钟信号 |
接口应用
Touch
T5-E1 模组提供 16 个电容式传感 GPIO,管脚描述如下:
| 管脚号 | 信号名称 | 功能描述 |
|---|---|---|
| 11 | P28 | TOUCH2 |
| 24 | P12 | TOUCH0 |
| 25 | P13 | TOUCH1 |
| 32 | P47 | TOUCH15 |
| 33 | P46 | TOUCH14 |
| 42 | P29 | TOUCH3 |
| 46 | P31 | TOUCH5 |
| 47 | P30 | TOUCH4 |
| 48 | P33 | TOUCH7 |
| 49 | P32 | TOUCH6 |
| 51 | P34 | TOUCH8 |
| 52 | P35 | TOUCH9 |
| 56 | P36 | TOUCH10 |
| 57 | P37 | TOUCH11 |
| 63 | P38 | TOUCH12 |
| 64 | P39 | TOUCH13 |
-
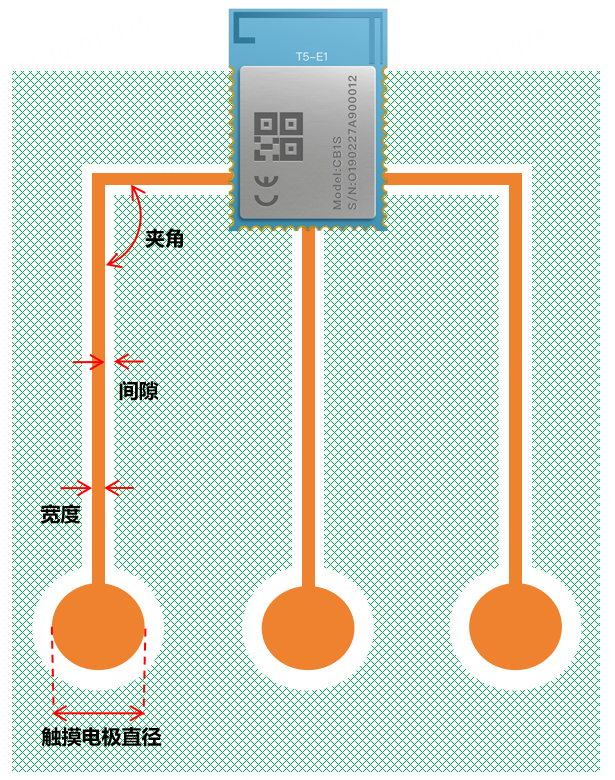
使用 TOUCH 功能时,建议靠近模组侧预留串联电阻,用于减小线上的耦合噪声和干扰,也可加强 ESD 保护。该阻值建议 470 Ω 到 2 kΩ,推荐 510 Ω。具体值还需根据产品实际测试效果而定。
-
走线尽量短而细,要求长度小于 300 mm,宽度不大于 0.18 mm,走线夹角大于等于 90°。不同触摸通道之间的间距尽量远,且要远离例如 RF、I2C、SPI、高速信号线等。
-
触摸电极和走线周围用栅格地围绕,走线离地间隙范围 0.5 mm 到 1 mm。
-
触摸电极直径范围 8 mm 到 15 mm。
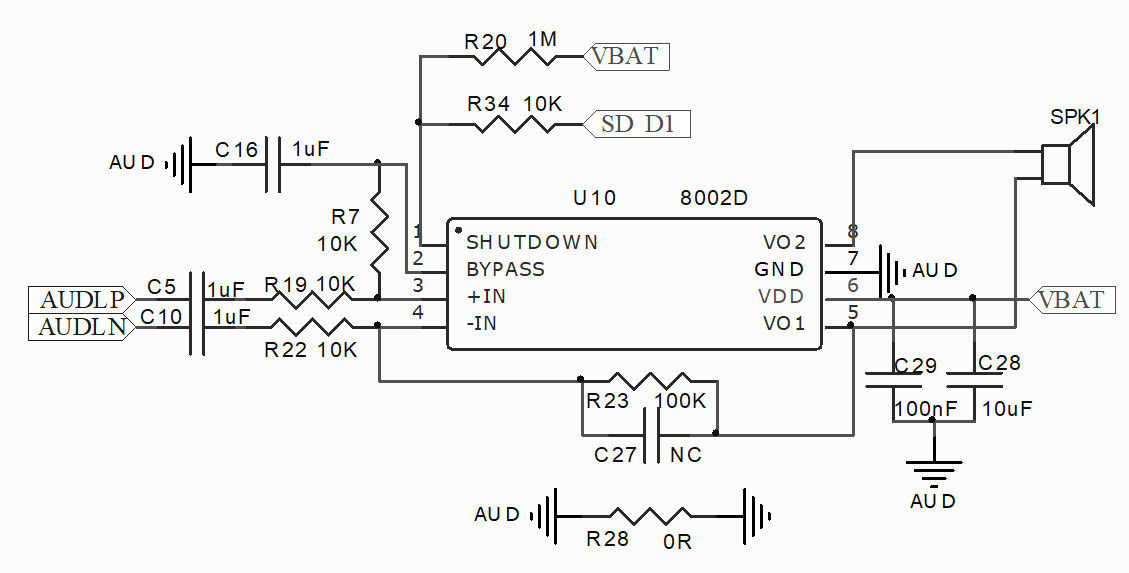
Speaker
管脚描述
| 管脚号 | 信号名称 | 功能描述 |
|---|---|---|
| 61 | LN | AUDL_N,语音负极输出 |
| 62 | LP | AUDL_P,语音正极输出 |
接口应用
MIC
管脚描述
| 管脚号 | 信号名称 | 功能描述 |
|---|---|---|
| 66 | MP1 | MIC1_P,麦克风 1 正极输入 |
| 67 | MN1 | MIC1_N,麦克风 1 负极输入 |
| 68 | MN2 | MIC2_N,麦克风 2 负极输入 |
| 69 | MP2 | MIC2_P,麦克风 2 正极输入 |
| 70 | MBS | MICBIAS,麦克风偏置电压 |
接口应用
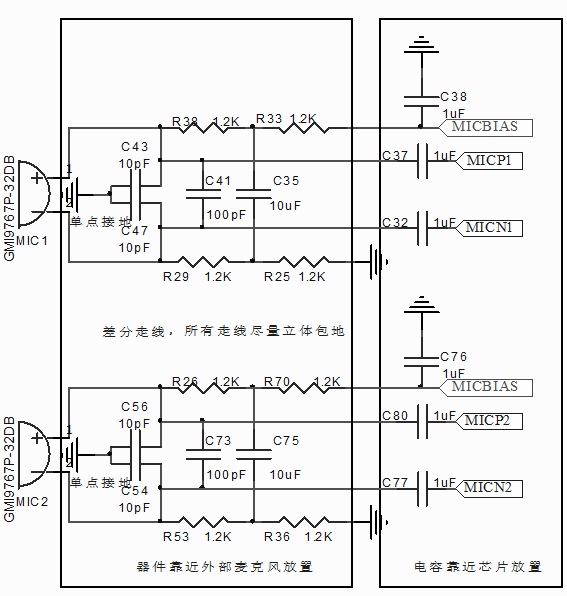
如果只用一路 MIC,必须用 MIC1。
模组电源相关
- T5-E1 工作电压:2.5 V - 3.6 V。T5-E1 模组的 VBAT 和 VIO 不连在一起,VBAT 和 VIO 之间通过 LDO 供电,相差 200 mv,比如 VBAT 标定 3.3 V,VIO 为 3.1 V。如需驱动 SD 卡等外设,建议 3.0 V - 3.6 V,典型值 3.3 V。建议给模组 3.3 V 的供电电流大于输入的最大电流值,且外部滤波电容总容量大于 10 μF。
- 模组电源引脚的滤波电容 C1 和 C2 尽量靠近电源引脚放置。
模组引脚相关
- 模组启动瞬间 5ms 内(程序加载启动前),I/O 存在不可控高电平。如果应用有影响,建议增加 4.7K 下拉电阻。
- 模组的 RST 引脚是硬件复位引脚,在模组内部已经配置弱上拉,不使用可做悬空处理。如果模组配过网,不能通过该引脚清除配网信息。
- 模组的 TX1 引脚是模式选择脚,上电前拉低进入测试固件,悬空或拉高进入应用固件。正常使用时,这是日志打印口。
- 其他未使用引脚都可做悬空处理。
- 具体的引脚信息,可参考对应的模组规格书。
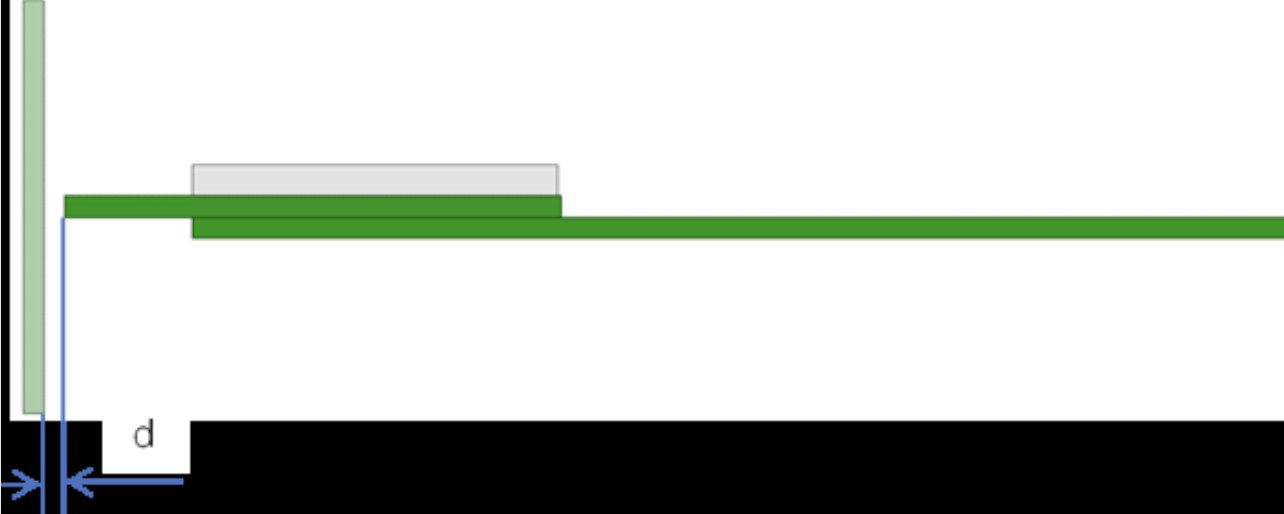
模组上电时序
-
每次上电时,模组 GPIO 口引脚的高电平电压的建立时间
t2,必须大于或等于模组电源引脚的电压的建立时间t1。如下图: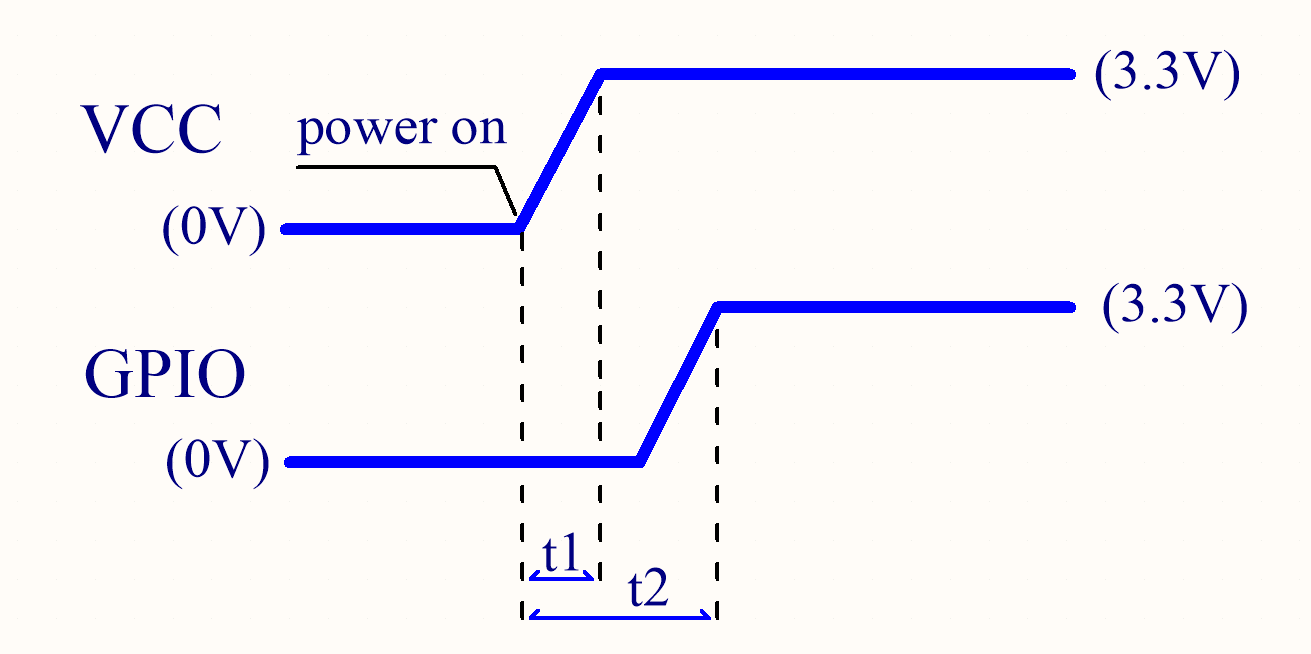
-
如果模组 GPIO 引脚高电平电压的建立时间
t2,小于模组电源引脚电压的建立时间t1,可能会引起模组无法启动。- 能够让模组恢复到正常状态的方式:通过对模组的硬件复位引脚(RST)拉低 1 ms 后,再拉高,实现模组重启。
- 不能让模组恢复到正常状态的方式:通过反复对模组电源引脚的通电断电。
低功耗设计
方式一:电源引脚通断电
该方式通过对模组电源引脚通断电的控制,实现整机低功耗。
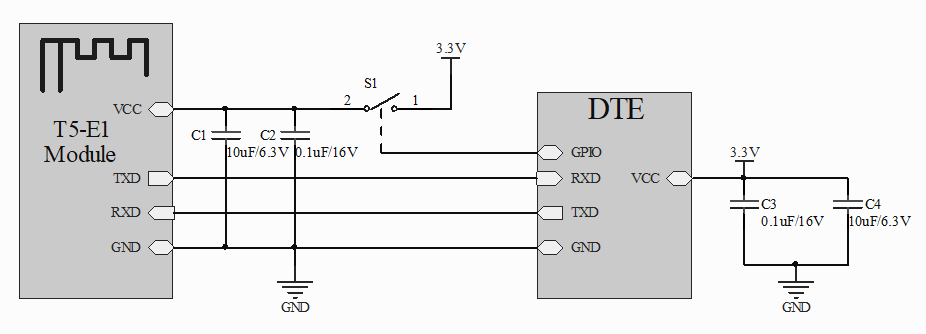
-
原理:如图所示,MCU 通过 GPIO 口控制开关器件 S1,实现对模组的通断电操作。
- 当数据需要上报时,GPIO 口控制开关器件 S1 导通,此时模组上电并建立串口通信连接,然后 MCU 通过模组将数据同步到云端和 App。
- 当数据上报完成后,GPIO 口控制开关器件 S1 断开,此时模组断电并处于无功耗状态。
-
缺点:
- 当开关器件 S1 处在断开状态时,模组是处在断电状态的,模组的 TXD 引脚与 RXD 引脚和 MCU 的 RXD 引脚与 TXD 引脚仍处在常连接状态。
- 这时电源通过 MCU 的 UART 引脚流经模组的 UART 引脚,会电流倒灌到模组的 VCC 引脚。
- 模组的 TXD 引脚和 RXD 引脚电平还处于高电平,电流倒灌会造成模组功耗增加。
- 等下次 S1 导通至模组上电时,模组的 TXD 引脚和 RXD 引脚高电平的建立时间早于模组的电源引脚电压建立时间,造成模组死机。
-
解决办法 1:硬件不做变更,MCU 软件实现优化。当 MCU 检测到数据上报云端和 App 的任务完成后,MCU 程序还需要按以下步骤操作。
- 先将 MCU 的 TXD 和 RXD 引脚设置为普通 I/O 口,且是开漏状态(Open-drain)或弱下拉状态。
- 再通过 GPIO 口控制 S1 断开,此时模组断电。
- 等下次需要上报数据时,MCU 先通过 GPIO 将 S1 导通,此时模组上电。
- MCU 再将 TXD 和 RXD 配置为 UART 功能,建立通信,上报数据。
该方案不适用于 MCU 的串口引脚不能被配置为开漏状态,或弱下拉状态的情况。如果串口链路有上拉电阻,则上拉电阻的一端需要连接到模组的 VCC 引脚上,或去掉上拉电阻。
-
解决办法 2:MCU 软件不做变更,硬件上增加电平转换电路。电平转换电路可参考前文 电平转换电路参考,然后参考 模组与 MCU 串口通信 中的 3.3V MCU 示意图,将电平转换电路嵌入到串口链路上。
方式二:降低模组闲置时的功耗
通过对模组 RST 引脚拉低,降低模组不工作时的功耗来实现整机低功耗。
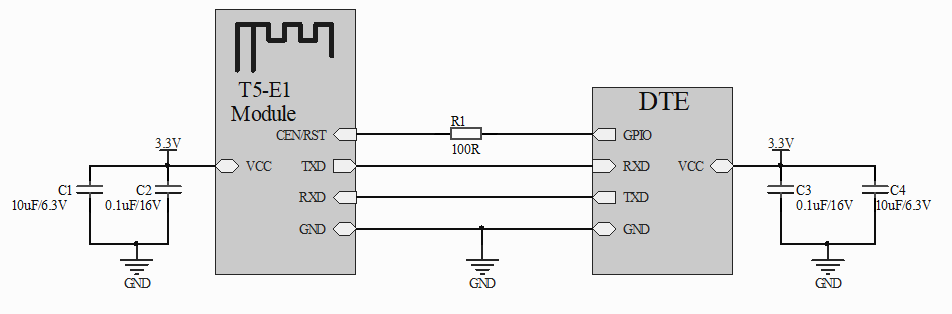
-
原理:如图所示,MCU 通过 GPIO 口控制模组的 RST 引脚,实现对模组的通断电操作。
- 当数据需要上报时,GPIO 口输出高电平,模组上电,串口通信建立连接,MCU 通过模组将数据同步到云端和 App。
- 当数据上报完成后,GPIO 口输出低电平,模组处在复位状态,模组低功耗。
-
缺点:模组 RST 引脚内部有 10K 上拉电阻,当模组处在复位状态时,模组的输入电流仍有 330 μA。
射频相关测试
由于天线对周围器件和外壳的距离比较敏感,因此建议完成整机测试后,进行相关射频(RF)的测试,来验证产品 RF 的性能。下表列出了可验证的项目及指标。
| 测试项目 | 测试指标 |
|---|---|
| 室内环境拉距 | ≥ 50m |
| 室外空旷环境拉距 | ≥ 75m |
| 整机信令模式 TRP(测试模式为 11B 11Mbps) | ≥ 10 dBm |
| 整机 TIS(测试模式为 11B 11Mbps) | ≤ -83 dBm |
- 整机信令模式 TRP 和 整机 TIS 测试项需要借助天线厂家或认证机构的暗室进行测试。
- 以上测试项目适用于大部分 Wi-Fi 产品,但可能不适用于一些特殊产品。
天线
天线净空说明
-
天线辐射方向外壳不可使用金属材质,或在塑料壳体表面使用含有金属成分的喷漆和镀层。天线周围避免使用金属螺丝、金属铆钉或其他金属器件,以免影响天线的辐射。建议模组天线部分和其他金属件距离至少在 15 mm 以上。
-
顶盖到天线的距离会影响天线的性能,外壳距离天线越远,性能影响越小。
-
上下壳到天线的距离会影响天线的性能,上下壳距离天线越远,性能影响越小。

-
模组尽量远离喇叭、电源开关、摄像头、HDMI、USB 等其他高速信号设备,避免引起干扰。
-
天线附近避免金属遮挡,如有同频信号干扰,需充分评估,保证隔离度。
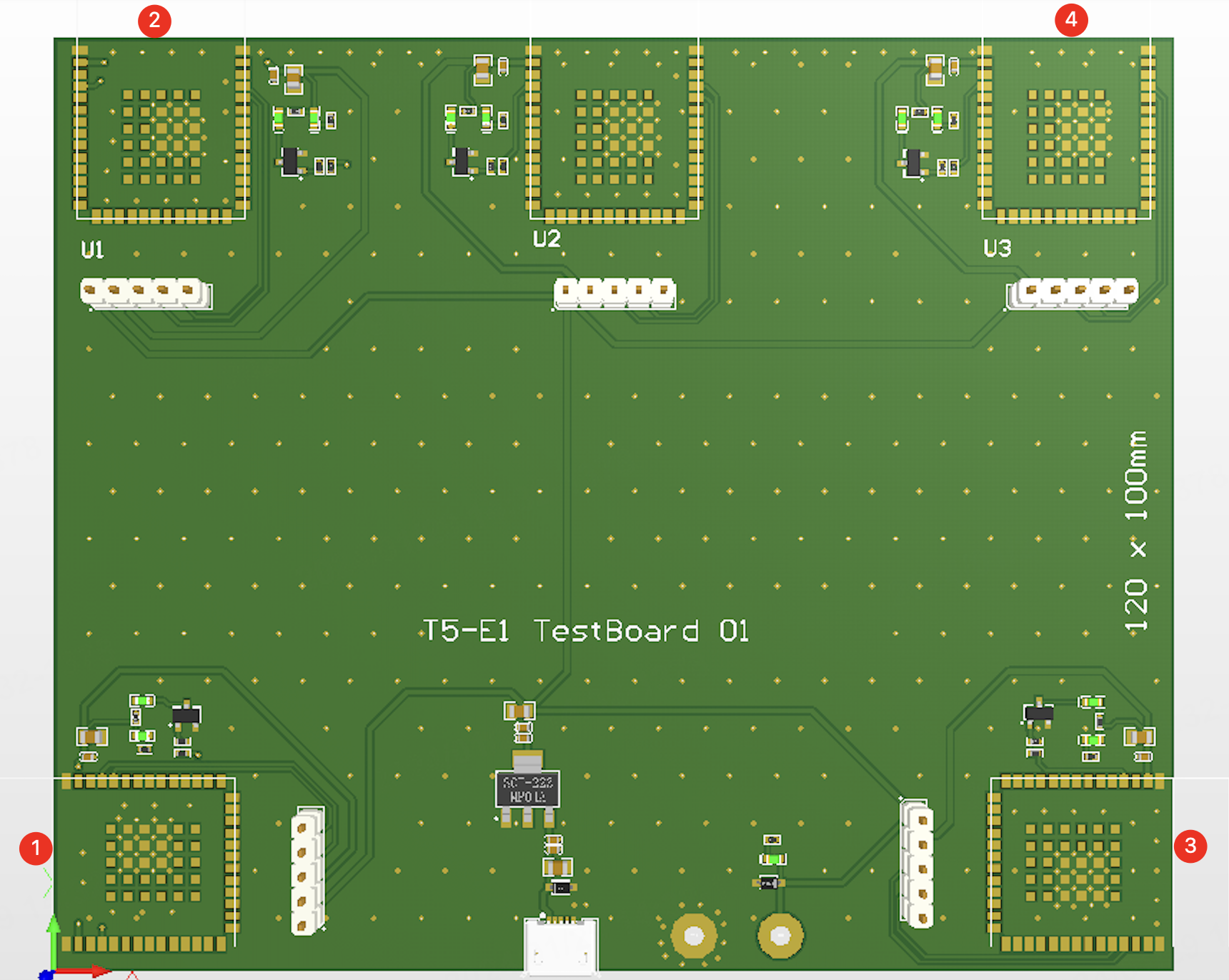
-
根据 T5-E1 模组的天线形态,模组在使用时候,可以选择 位置 3 或者 位置 4(最优位置),即天线馈点位置尽量靠近板边。下图红点标记的位置即 T5-E1 天线馈点位置。

封装信息
机械尺寸和背面焊盘尺寸
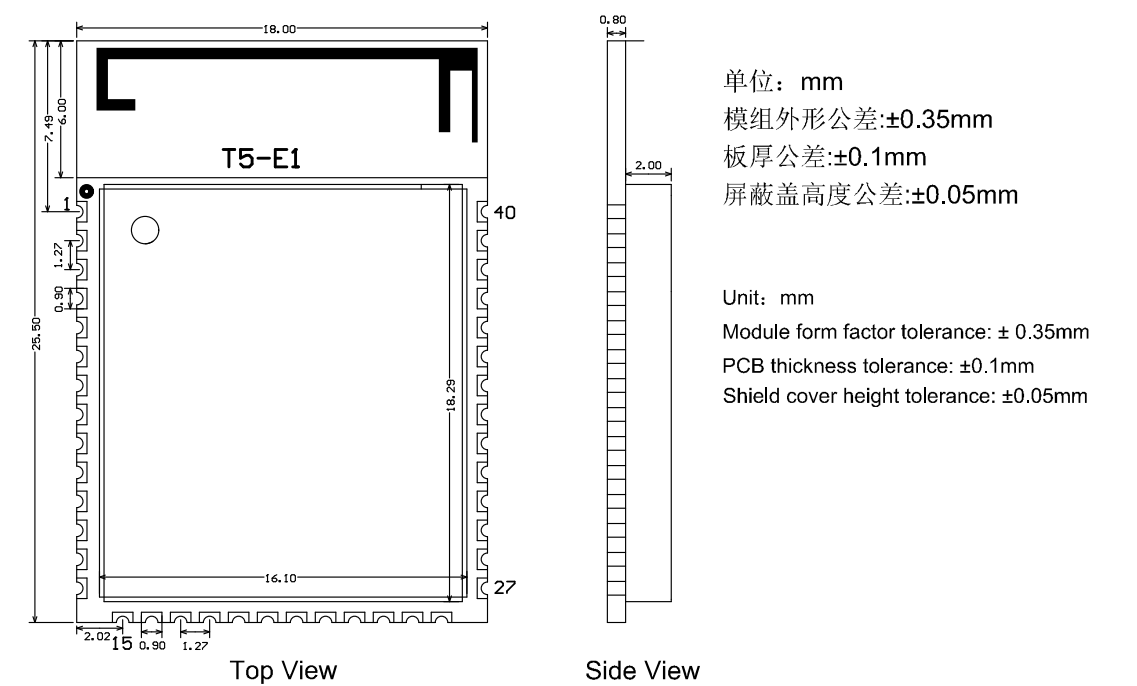
PCB 封装(SMT)
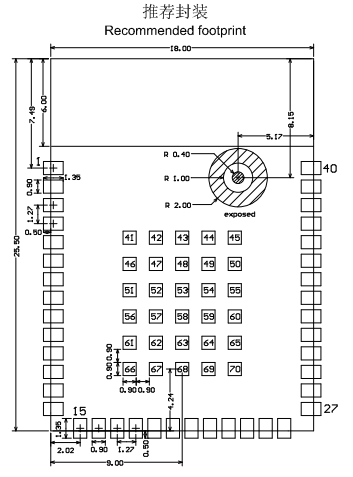
模组长宽公差 ±0.35mm,高度公差 ±0.15mm。PCB 板厚公差 ±0.1mm。
该内容对您有帮助吗?
是意见反馈该内容对您有帮助吗?
是意见反馈





