前提条件
- 已阅读 Ray 新手村任务,了解 Ray 框架的基础知识。
- 已阅读 使用 Ray 开发万能面板,了解 Ray 面板开发的基础知识。
- 已阅读 激光扫地机接口,了解扫地机相关对外接口。
- 扫地机器人模板使用
SDM(Smart Device Model)开发,关于SDM相关可以 查看 SDM 文档。
开发环境
详见 面板小程序 > 搭建环境。
产品名称:扫地机器人
需求原型
- 首页功能:
- 地图展示
- 清扫(开始清扫/暂停继续/回充)
- 多种清扫模式(全屋/选区/定点/划区)
- 视频监控功能
- 设置页功能:
- 多地图管理
- 地图编辑(禁区/虚拟墙/地板材质)
- 房间编辑(合并/分割/命名/清扫顺序)
- 定时
- 勿扰模式
- 清扫记录
- 语音包
- 手动控制
由于产品定义了面板和设备所拥有的功能点,所以在开发一个智能设备面板之前,我们首先需要创建一个激光型扫地机器人产品,定义产品有哪些功能点,然后再在面板中一一实现这些功能点。
首先,注册登录 涂鸦开发者平台,并在平台创建产品:
- 单击页面左侧 产品 > 产品开发,在 产品开发 页面单击 创建产品。
- 在 标准类目 下选择 小家电,产品品类选择 扫地机器人。
- 选择智能化方式,产品方案 选择 激光型扫地机,并完善产品信息,如填写 产品名称 为 Robot。
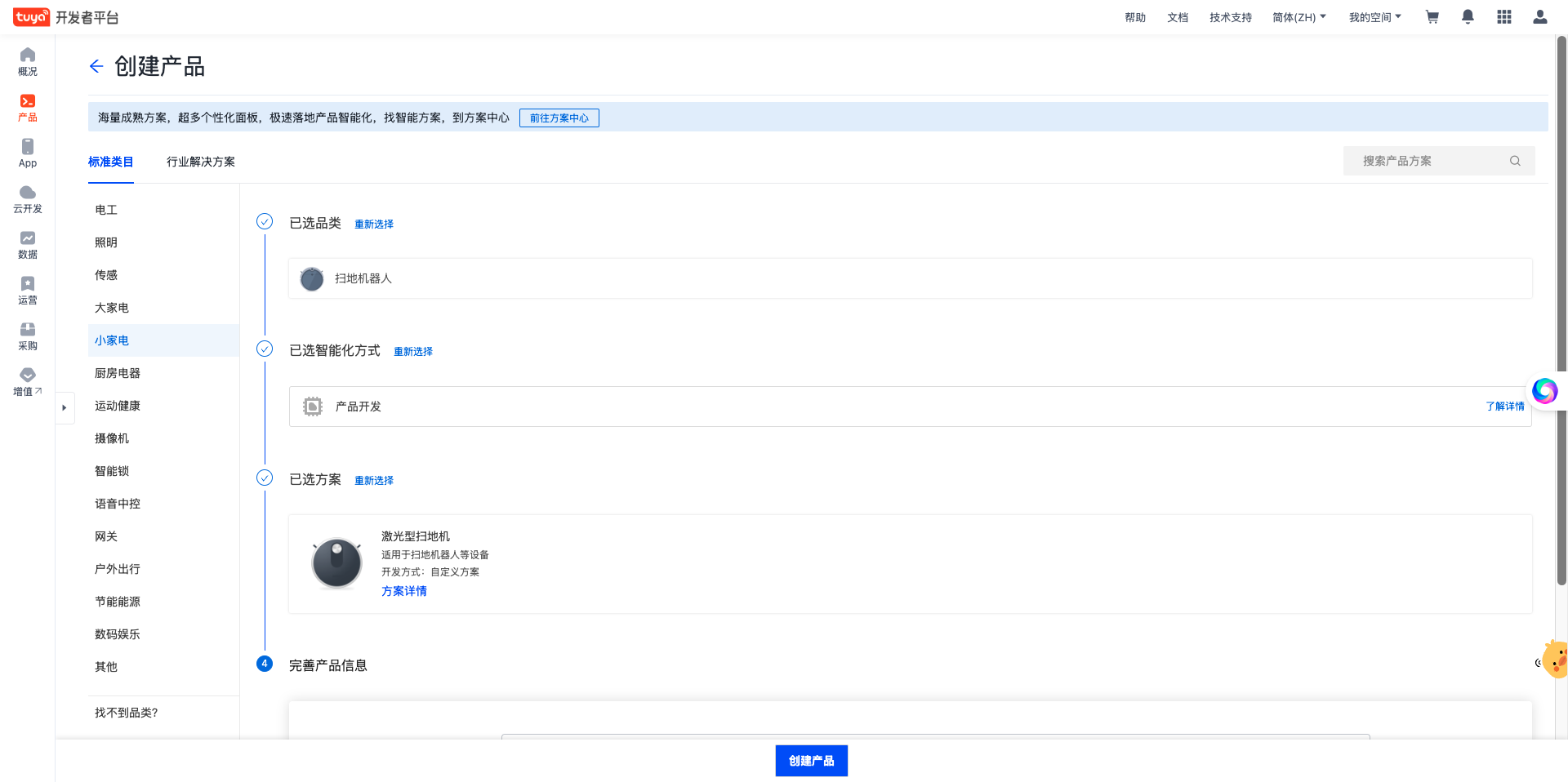
- 单击 创建产品,完成产品创建。
- 产品创建完成后,进入到 添加标准功能 页面,根据自己需求添加功能即可(这些功能未选择不影响视频预览),然后单击 确定。
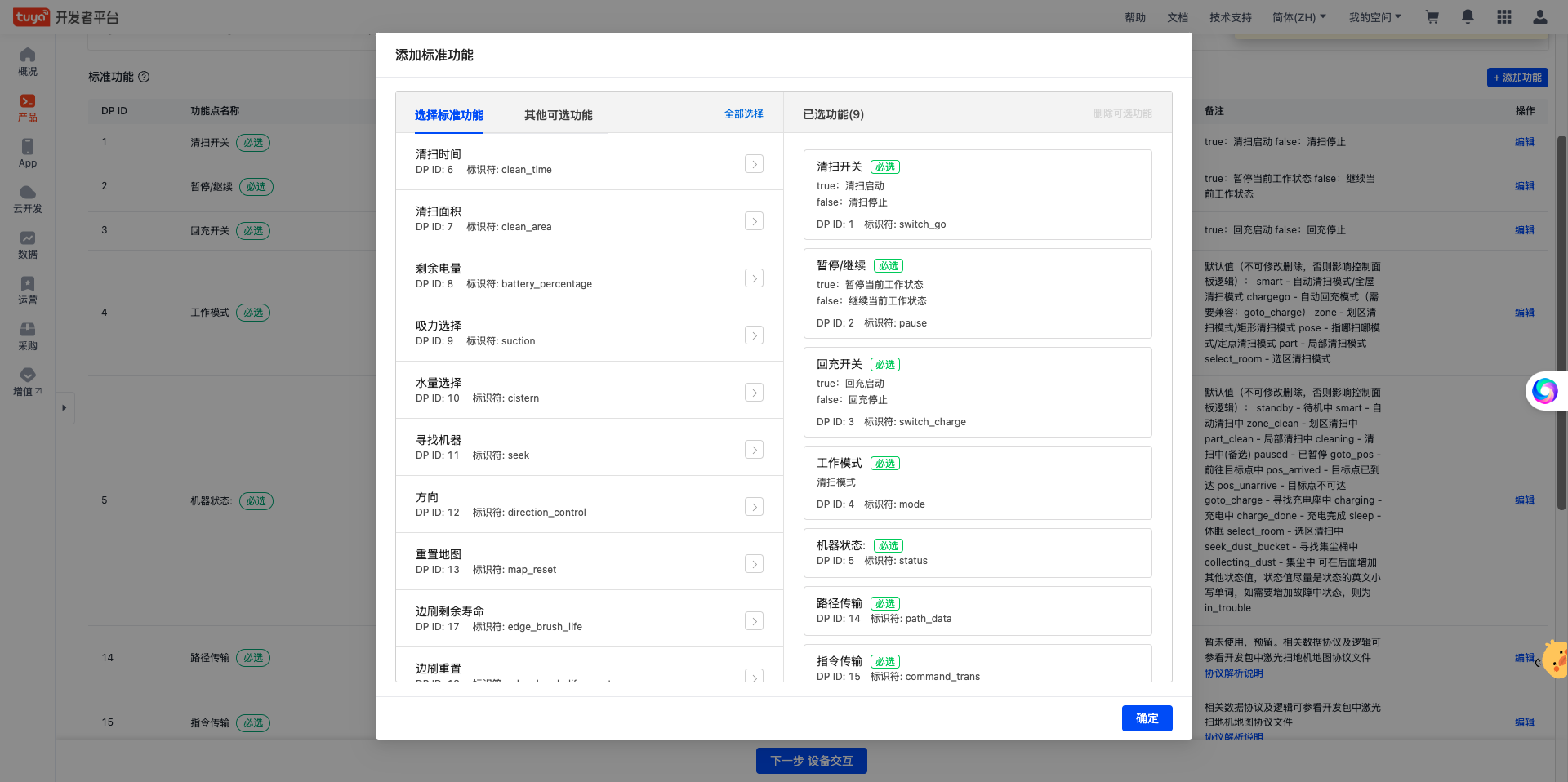
🎉 完成以上步骤后,一个名为 Robot 的扫地机器人产品创建完成。
开发者平台创建面板小程序
面板小程序的开发在 小程序开发者 平台上进行操作,首先请前往 小程序开发者平台 完成平台的注册登录。
详细操作步骤可以参考 创建面板小程序。
IDE 基于模板创建项目工程
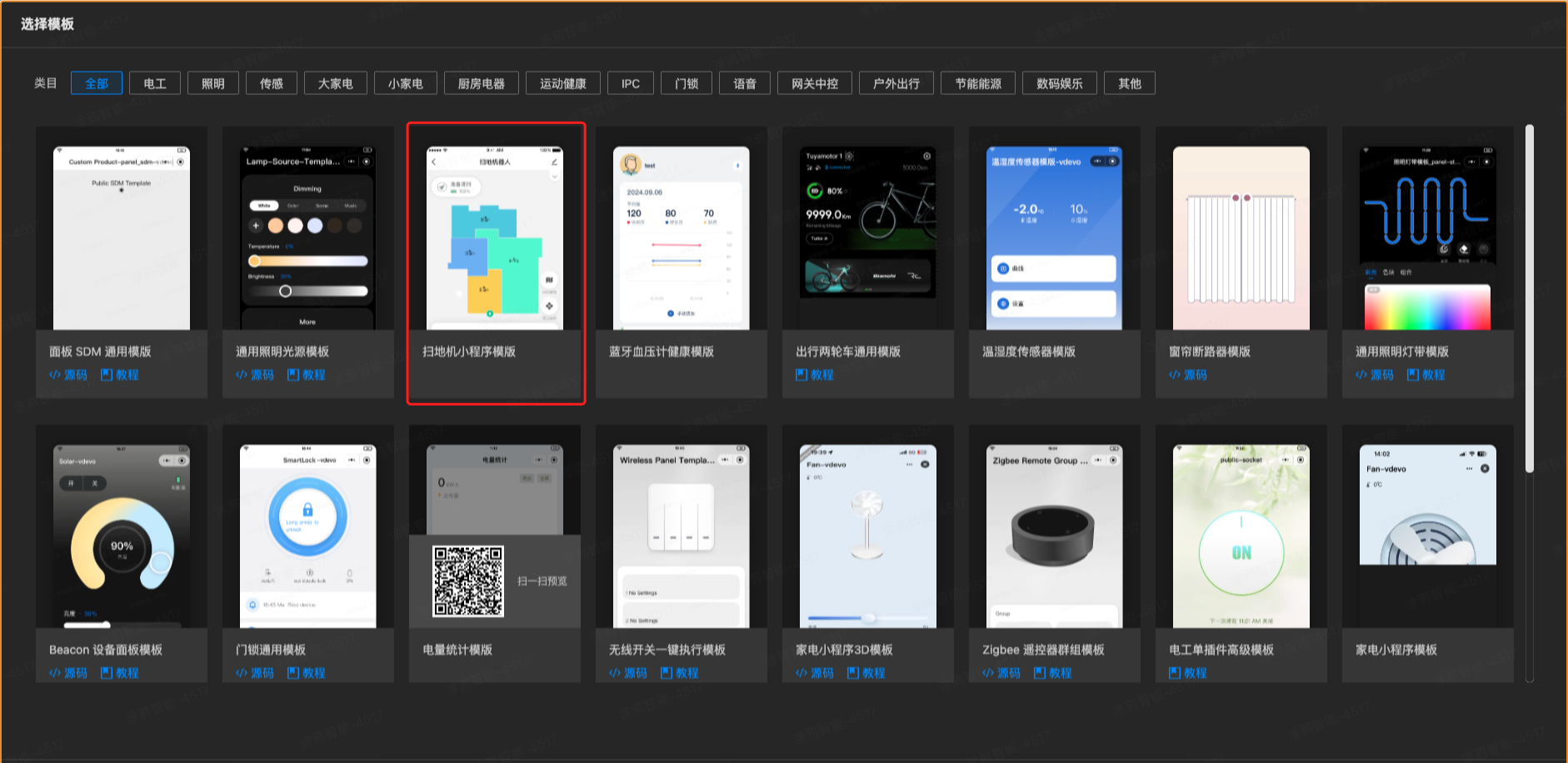
打开 IDE 创建一个基于 扫地机小程序模板 的面板小程序项目,需要在 Tuya MiniApp IDE 上操作。
详细操作步骤可以参考 初始化项目工程。
完成以上步骤后,一个面板小程序的开发模板初始化完成。以下为工程目录的介绍:
├── src
│ ├── api
│ │ └── ossApi.ts // oss 地图下载相关的 API
│ ├── components
│ │ ├── DecisionBar // 确认框组件
│ │ ├── EmptyMap // 空地图组件
│ │ ├── HomeTopBar // 首页 TopBar 组件
│ │ ├── IpcRecordTimer // IPC 录制时间组件
│ │ ├── IpcRecordTip // IPC 录制提示组件
│ │ ├── Loading // 地图 Loading 组件
│ │ ├── Map // 地图组件 (WebViewMap, RjsMap)
│ │ ├── RoomNamePopLayout // 房间命名弹窗组件
│ │ ├── RoomPreferencePopLayout // 房间清洁偏好弹窗组件
│ │ ├── Selector // 选择器组件
│ ├── constant
│ │ ├── dpCodes.ts // dpCode 常量
│ │ ├── index.ts // 存放所有的常量配置
│ ├── devices // 设备模型
│ ├── hooks // hooks
│ ├── i18n // 多语言
│ ├── iconfont // IconFont 文件
│ ├── pages
│ │ ├── addTiming // 添加定时页面
│ │ ├── cleanPreference // 清洁偏好页面
│ │ ├── cleanRecordDetail // 清扫记录详情页面
│ │ ├── cleanRecords // 清扫记录列表页面
│ │ ├── doNotDisturb // 勿扰模式页面
│ │ ├── home // 首页
│ │ ├── ipc // 视频监控页面
│ │ ├── manual // 手动控制页面
│ │ ├── mapEdit // 地图编辑页面
│ │ ├── multiMap // 多地图管理页面
│ │ ├── roomEdit // 房间编辑页面
│ │ ├── roomFloorMaterial // 房间地板材质页面
│ │ ├── setting // 设置页
│ │ ├── timing // 定时列表页面
│ │ ├── voicePack // 语音包页面
│ ├── redux // redux
│ ├── res // 图片资源 & svg 相关
│ ├── styles // 全局样式
│ ├── utils
│ │ ├── index.ts // 业务常用工具方法
│ │ ├── ipc.ts // ipc 相关工具方法
│ │ ├── robotStatus.ts // 扫地机状态判断方法
│ ├── app.config.ts
│ ├── app.less
│ ├── app.tsx
│ ├── composeLayout.tsx // 处理监听子设备添加,解绑,DP 变化等
│ ├── global.config.ts
│ ├── mixins.less // less mixins
│ ├── routes.config.ts // 配置路由
│ ├── variables.less // less variables
├── typings // 全局类型定义
为了能够让开发者更关注在 UI 层面的处理,而不需要过多关心一些其他的流程逻辑处理,我们将扫地机进行模块拆分,将底层实现与业务调用独立。目前扫地机面板主要依赖的包有以下几个:
@ray-js/robot-map:业务层直接调用,提供了 RobotMap 组件和 RjsRobotMap 组件,并且暴露了地图操作的常用方法。@ray-js/robot-data-stream:业务层直接调用,封装了面板与设备的 P2P 传输方法,开发者可以忽略 P2P 通信过程中的复杂过程,只需要关注业务本身逻辑。@ray-js/robot-protocol:业务层直接调用,提供完整协议解析标准能力,将扫地机协议中比较复杂的raw类型 DP 点的解析、编码过程进行了封装。
对于普遍的扫地机需求,基本上只关注应用业务逻辑和 UI 展示,不需要关心内部依赖包中的实现,依赖包的升级会做到向下兼容,可以在项目中针对依赖包进行单独升级。
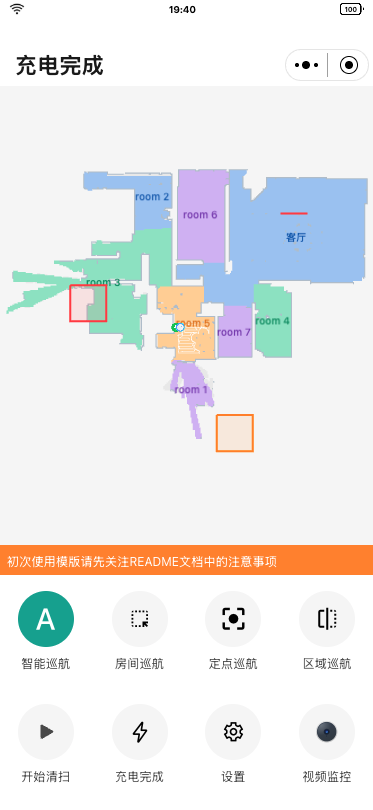
实时地图的显示是一个扫地机应用的核心功能,那么,如何在首页渲染出第一张地图呢?
地图组件
@ray-js/robot-map 提供了两种类型的地图组件:
- WebViewMap 组件
- RjsMap 组件
你可以按业务场景需要选择使用 WebViewMap 组件 还是 RjsMap 组件。
首页通常为实时展示的扫地机地图,更推荐使用 WebViewMap 组件,可以按以下方式引入:
import WebViewMap from "@/components/Map/WebViewMap";
// Add your custom logic here
return (
<WebViewMap
map={map}
path={path}
roomProperties={roomProperties}
virtualWalls={virtualWalls}
forbiddenSweepZones={forbiddenSweepZones}
forbiddenMopZones={forbiddenMopZones}
cleanZones={cleanZones}
spots={spots}
runtime={{
enableRoomSelection: false,
selectRoomIds,
editingCleanZoneIds,
}}
onMapReady={handleMapReady}
onMapDrawed={handleMapDrawed}
onClickRoom={handleClickRoom}
onClickRoomProperties={handleClickRoom}
/>
);
你可以通过文档查阅更多有关于 @ray-js/robot-map 的详细信息:
$ npx serve node_modules/@ray-js/robot-map-sdk/dist-docs
数据接入
那么,地图和路径数据是怎么注入到这个组件的呢?
模板封装了 @ray-js/robot-data-stream 工具库,内置了 P2P 初始化、建立连接、下载数据流、销毁等一系列流程,只需要调用 useP2PDataStream 这个 Hooks,就能实时获得从扫地机设备传输过来的地图、路径数据(前提是您的扫地机设备已经开发支持 P2P 数据传输)。
import { useP2PDataStream } from "@ray-js/robot-data-stream";
import { useMapData, usePathData } from "@/hooks";
// useMapData 是将地图数据进行一些处理后注入到 地图组件 的hooks
const { onMapData } = useMapData();
// usePathData 是将路径数据进行一些处理后注入到 地图组件 的hooks
const { onPathData } = usePathData();
useP2PDataStream(getDevInfo().devId, onMapData, onPathData);
IDE 的地图调试
如以上步骤已顺利完成,也许你已经成功在手机上看到了地图,但如果开发阶段就要依赖于手机扫码的方式进行调试,会有些许不便。那么,是否有方法能在 IDE 上也展示实时地图呢?
虽然 IDE 不具备 P2P 连接的环境,但可以借助 扫地机调试助手 插件来实现,具体使用方式可参考 文档。
清扫模式
清扫是扫地机器人最基本的功能。模板内置了 4 种清扫模式:全屋、选区、定点、划区。
所有清扫模式的状态都通过 Redux 进行管理,存储在 mapStateSlice 中。当前激活的清扫模式保存在 currentMode 字段中。
切换清扫模式
清扫模式的切换非常简单,只需要通过 Redux 更新 currentMode 状态:
import { useDispatch } from "react-redux";
import { updateMapState } from "@/redux/modules/mapStateSlice";
const dispatch = useDispatch();
/**
* 切换清扫模式
* @param mode - 清扫模式:'smart' | 'select_room' | 'pose' | 'zone'
*/
const handleSwitchMode = async (mode: Mode) => {
// 获取视口中心点(用于定点清扫)
let spotPoint = { x: 0, y: 0 };
if (mode === "pose") {
spotPoint = await mapApi.getSpotPointByViewportCenter();
}
dispatch(
updateMapState({
currentMode: mode,
selectRoomIds: [],
spots: mode === "pose" ? [{ id: "0", point: spotPoint }] : [],
cleanZones: mode === "zone" ? [] : [],
})
);
};
定点清扫(指哪扫哪)
定点清扫模式允许用户在地图上添加一个可移动的清扫点。新模板通过 MapApi 实例和 Redux 状态来实现这一功能。
获取 MapApi 实例
MapApi 实例在地图组件加载完成后会通过 onMapReady 回调返回,并存储到 Redux 中:
import { setMapApi } from "@/redux/modules/mapApisSlice";
const handleMapReady = (mapApi: MapApi) => {
// 将 mapApi 实例存储到 Redux,方便其他组件调用
dispatch(setMapApi({ key: "home", mapApi }));
};
添加定点清扫点
在其他组件中,你可以通过 Redux selector 获取 mapApi 实例,并使用它来获取视口中心的定点坐标:
import { useSelector, useDispatch } from "react-redux";
import { selectMapApiByKey } from "@/redux/modules/mapApisSlice";
import { updateMapState } from "@/redux/modules/mapStateSlice";
const mapApi = useSelector(selectMapApiByKey("home"));
const dispatch = useDispatch();
/**
* 添加一个定点清扫的移动点
*/
const handleAddSpot = async () => {
// 获取视口中心点坐标
const spotPoint = await mapApi.getSpotPointByViewportCenter();
dispatch(
updateMapState({
currentMode: "pose",
spots: [
{
id: "0",
point: spotPoint,
},
],
})
);
};
地图组件中的定点清扫配置
定点清扫的交互由 WebViewMap 组件的 props 控制:
<WebViewMap
// 定点清扫的点位数据
spots={spots}
runtime={{
// 当机器人不工作且处于定点模式时,允许编辑定点位置
editingSpotIds:
robotIsNotWorking(dpStatus) && currentMode === "pose"
? spots.map((spot) => spot.id)
: [],
}}
// 定点更新回调
onUpdateSpot={(spot: SpotParam) => {
dispatch(updateMapState({ spots: [spot] }));
}}
/>
划区清扫
划区清扫模式允许用户在地图上绘制多个矩形区域进行清扫。
添加划区清扫区域
使用 mapApi.getCleanZonePointsByViewportCenter() 方法可以在视口中心生成一个划区框:
import { useSelector, useDispatch } from "react-redux";
import { selectMapApiByKey } from "@/redux/modules/mapApisSlice";
import {
selectMapStateByKey,
updateMapState,
} from "@/redux/modules/mapStateSlice";
import { nanoid } from "@reduxjs/toolkit";
import { offsetPointsToAvoidOverlap } from "@ray-js/robot-map";
const mapApi = useSelector(selectMapApiByKey("home"));
const cleanZones = useSelector(selectMapStateByKey("cleanZones"));
const dispatch = useDispatch();
/**
* 新增划区框
*/
const handleAddCleanZone = async () => {
// 在视口中心生成一个划区框,大小为 1.6m
const zonePoints = await mapApi.getCleanZonePointsByViewportCenter({
size: 1.6,
});
// 避免与现有划区框重叠
offsetPointsToAvoidOverlap(
zonePoints,
cleanZones.map((zone) => zone.points)
);
const newId = nanoid();
dispatch(
updateMapState({
cleanZones: [
...cleanZones,
{
points: zonePoints,
id: newId,
},
],
// 设置为可编辑状态
editingCleanZoneIds: [newId],
})
);
};
地图组件中的划区清扫配置
<WebViewMap
// 划区清扫的区域数据
cleanZones={cleanZones}
runtime={{
// 当前可编辑的划区ID列表
editingCleanZoneIds,
}}
// 点击划区框时触发
onClickCleanZone={(data: ZoneParam) => {
dispatch(updateMapState({ editingCleanZoneIds: [data.id] }));
}}
// 划区框更新时触发(拖动、缩放)
onUpdateCleanZone={(cleanZone: ZoneParam) => {
dispatch(
updateMapState({
cleanZones: cleanZones.map((zone) =>
zone.id === cleanZone.id ? cleanZone : zone
),
})
);
}}
// 删除划区框时触发
onRemoveCleanZone={(id: string) => {
dispatch(
updateMapState({
cleanZones: cleanZones.filter((zone) => zone.id !== id),
})
);
}}
/>
选区清扫
选区清扫允许用户点击地图上的房间来选择需要清扫的区域。
地图组件中的选区清扫配置
<WebViewMap
runtime={{
// 开启房间选择模式
enableRoomSelection: currentMode === "select_room",
// 已选中的房间ID列表
selectRoomIds,
}}
// 点击房间时触发
onClickRoom={(data: RoomData) => {
if (robotIsNotWorking(dpStatus) && currentMode === "select_room") {
const { selectRoomIds } = store.getState().mapState;
if (selectRoomIds.includes(data.id)) {
// 取消选择
dispatch(
updateMapState({
selectRoomIds: selectRoomIds.filter((id) => id !== data.id),
})
);
} else {
// 添加选择
dispatch(
updateMapState({
selectRoomIds: [...selectRoomIds, data.id],
})
);
}
}
}}
/>
下发清扫指令
当用户点击开始清扫按钮时,需要根据当前的清扫模式下发相应的指令:
import {
encodeZoneClean0x3a,
encodeSpotClean0x3e,
encodeRoomClean0x14,
} from "@ray-js/robot-protocol";
import { PROTOCOL_VERSION } from "@/constant";
/**
* 下发划区清扫指令
*/
const handleZoneStart = async () => {
const { cleanZones } = store.getState().mapState;
const command = encodeZoneClean0x3a({
version: PROTOCOL_VERSION,
protocolVersion: 2,
cleanMode: 0,
suction: 1,
cistern: 1,
cleanTimes: 1,
origin: { x: 0, y: 0 },
zones: cleanZones.map((item) => ({
name: "",
points: item.points,
})),
});
await dpActions[commandTransCode].set(command);
await dpActions[modeCode].set("zone");
await dpActions[switchGoCode].set(true);
};
/**
* 下发定点清扫指令
*/
const handlePoseStart = async () => {
const { spots } = store.getState().mapState;
const command = encodeSpotClean0x3e({
version: PROTOCOL_VERSION,
protocolVersion: 1,
cleanMode: 0,
suction: 4,
cistern: 0,
cleanTimes: 2,
origin: { x: 0, y: 0 },
points: spots.map((item) => item.point),
});
await dpActions[commandTransCode].set(command);
await dpActions[modeCode].set("pose");
await dpActions[switchGoCode].set(true);
};
/**
* 下发选区清扫指令
*/
const handleSelectRoomStart = async () => {
const { version, selectRoomIds } = store.getState().mapState;
const data = encodeRoomClean0x14({
cleanTimes: 1,
roomIds: selectRoomIds,
mapVersion: version,
});
dpActions[commandTransCode].set(data);
dpActions[modeCode].set("select_room");
dpActions[switchGoCode].set(true);
};
核心概念总结
- 状态管理:所有清扫相关的状态都存储在 Redux 的
mapStateSlice中 - MapApi 实例:通过
mapApisSlice存储和访问,提供地图操作的核心方法 - 地图组件:
WebViewMap组件通过 props 接收状态,通过回调函数通知状态变更 - 清扫模式:通过
currentMode字段控制,配合不同的runtime配置实现不同的交互模式
概述
多地图功能允许扫地机器人保存和管理多张不同的地图(例如不同楼层的地图)。模板采用了快照图片的方式实现多地图列表展示,相比直接渲染多个地图组件实例,这种方式具有更好的性能表现。
实现方案对比
建议使用的两种多地图实现方案:
方案 | 优点 | 缺点 | 适用场景 |
快照图片方式(推荐) | 性能优秀,内存占用低,加载速度快 | 图片为静态快照,无法交互 | 多地图列表展示 |
RjsMap 组件方式 | 可交互,功能完整 | 创建多个实例导致性能开销大,内存占用高 | 需要交互的场景 |
模板采用快照图片方式,使用 MapApi.snapshotByData() 方法生成地图快照。
核心实现
多地图功能的核心逻辑封装在 multiMapsSlice 中,主要包含以下几个部分:
1. 获取地图列表
通过 fetchMultiMaps 异步 action 获取设备存储的多地图数据:
import { useDispatch, useSelector } from "react-redux";
import {
fetchMultiMaps,
selectMultiMaps,
} from "@/redux/modules/multiMapsSlice";
const dispatch = useDispatch();
const multiMaps = useSelector(selectMultiMaps);
useEffect(() => {
// 获取多地图列表
dispatch(fetchMultiMaps());
}, []);
fetchMultiMaps 的执行流程:
- 从本地缓存读取已生成的快照图片
- 调用
getMultipleMapFilesAPI 获取云端地图文件列表 - 对比缓存和云端数据,清理已删除的地图快照
- 对未生成快照的地图,加入异步队列等待处理
- 返回地图列表数据
2. 生成地图快照
模板使用异步任务队列 createAsyncQueue 来串行处理快照生成任务,避免同时处理过多地图导致性能问题:
const taskQueue = createAsyncQueue(
async (params: { filePathKey: string; bucket: string; file: string }) => {
try {
const { filePathKey, bucket, file } = params;
// 1. 从云端下载地图数据
const data = await getMapInfoFromCloudFile({
bucket,
file,
});
const {
virtualState: { virtualWalls, forbiddenMopZones, forbiddenSweepZones },
} = data;
// 2. 获取 home 页面的 MapApi 实例
const homeMapApi = store.getState().mapApis.home;
if (homeMapApi) {
// 3. 使用 snapshotByData 生成快照图片
const snapshotImage = await homeMapApi.snapshotByData({
map: data.originMap,
roomProperties: decodeRoomProperties(data.originMap),
virtualWalls,
forbiddenMopZones,
forbiddenSweepZones,
});
// 4. 将快照存储到 Redux
store.dispatch(
upsertSnapshotImage({ key: filePathKey, snapshotImage })
);
}
} catch (err) {
console.error(err);
}
},
// 队列处理完成后,将所有快照保存到本地缓存
() => {
const { snapshotImageMap } = store.getState().multiMaps;
setStorage({
key: `snapshotImageMap_${devices.common.getDevInfo().devId}`,
data: JSON.stringify(snapshotImageMap),
});
}
);
关键点:
- 使用 home 页面的 MapApi 实例生成所有地图的快照,无需创建多个地图实例
snapshotByData()方法接收地图原始数据,返回 base64 格式的图片- 快照生成是异步的,通过队列串行处理
3. 显示地图快照
在多地图列表页面,直接使用 Image 组件显示快照:
import { Image } from "@ray-js/ray";
import { useSelector } from "react-redux";
import { ReduxState } from "@/redux";
const Item: FC<{ data: MultiMap }> = ({ data }) => {
const { filePathKey } = data;
// 从 Redux 获取快照图片
const snapshotImage = useSelector(
(state: ReduxState) => state.multiMaps.snapshotImageMap[filePathKey]
);
return (
<View className={styles.mapWrapper}>
{snapshotImage && (
<Image
className={styles.mapImage}
src={snapshotImage}
mode="aspectFit"
/>
)}
{/* 快照未生成时显示 Loading */}
<Loading isLoading={!snapshotImage} />
</View>
);
};
4. 地图操作
多地图支持两种操作:使用地图 和 删除地图。
使用地图
import { encodeUseMap0x2e } from "@ray-js/robot-protocol";
import { commandTransCode } from "@/constant/dpCodes";
const handleUseMap = async () => {
const { bucket, robotUseFile, mapId } = data;
// 获取云端文件的完整 URL
const { data: url } = await ossApiInstance.getCloudFileUrl(
bucket,
robotUseFile
);
// 下发使用地图指令
actions[commandTransCode].set(
encodeUseMap0x2e({
mapId,
url,
})
);
};
删除地图
import { encodeDeleteMap0x2c } from "@ray-js/robot-protocol";
const handleDelete = () => {
const { id } = data;
// 下发删除地图指令
actions[commandTransCode].set(encodeDeleteMap0x2c({ id }));
};
使用 RjsMap 组件方式(备选)
如果需要在多地图列表中实现交互功能,可以使用 RjsMap 组件直接渲染地图:
import RjsMap from "@/components/Map/RjsMap";
const Item: FC<{ data: MultiMap }> = ({ data }) => {
return (
<RjsMap
map={map}
path={path}
roomProperties={roomProperties}
virtualWalls={virtualWalls}
forbiddenSweepZones={forbiddenSweepZones}
forbiddenMopZones={forbiddenMopZones}
cleanZones={cleanZones}
spots={spots}
// ... 其他配置
/>
);
};
核心 API
API | 说明 |
| 获取多地图列表(异步 thunk) |
| 从云端下载地图数据 |
| 根据地图数据生成快照图片 |
| 更新快照图片到 Redux |
| 选择所有地图列表 |
| 根据 key 选择快照图片 |
概述
地图编辑功能允许用户在地图上设置虚拟限制区域,包括虚拟墙、禁扫区和禁拖区。这些区域会限制扫地机器人的清扫范围,保护特定区域不被打扰。
页面状态管理
地图编辑页面使用本地 state 管理所有编辑状态,不直接修改 Redux 中的数据,只有在用户点击"确定"时才下发指令:
const [virtualWalls, setVirtualWalls] = useState<VirtualWallParam[]>(
() => store.getState().mapState.virtualWalls
);
const [forbiddenSweepZones, setForbiddenSweepZones] = useState<ZoneParam[]>(
() => store.getState().mapState.forbiddenSweepZones
);
const [forbiddenMopZones, setForbiddenMopZones] = useState<ZoneParam[]>(
() => store.getState().mapState.forbiddenMopZones
);
// 编辑状态
const [editingVirtualWallIds, setEditingVirtualWallIds] = useState<string[]>(
[]
);
const [editingForbiddenMopZoneIds, setEditingForbiddenMopZoneIds] = useState<
string[]
>([]);
const [editingForbiddenSweepZoneIds, setEditingForbiddenSweepZoneIds] =
useState<string[]>([]);
核心功能实现
1. 添加虚拟墙
虚拟墙是一条可拖动两端点的线段,使用 mapApi.getWallPointsByViewportCenter() 在视口中心生成:
import { useThrottleFn } from "ahooks";
import { nanoid } from "@reduxjs/toolkit";
import { offsetPointsToAvoidOverlap } from "@ray-js/robot-map";
const { run: handleVirtualWall } = useThrottleFn(
async () => {
if (!mapApi) return;
// 在视口中心生成虚拟墙,宽度 1.2m
const wallPoints = await mapApi.getWallPointsByViewportCenter({
width: 1.2,
});
// 自动偏移,避免与已有的虚拟墙重叠
offsetPointsToAvoidOverlap(
wallPoints,
virtualWalls.map((wall) => wall.points)
);
const newId = nanoid();
setVirtualWalls([...virtualWalls, { id: newId, points: wallPoints }]);
setEditingVirtualWallIds([newId]);
},
{ wait: 300, leading: true, trailing: false }
);
关键点:
- 使用
useThrottleFn节流防止快速点击 offsetPointsToAvoidOverlap自动偏移避免重叠- 新创建的虚拟墙立即进入编辑状态
2. 添加禁扫区
禁扫区是一个可拖动、可缩放的矩形区域:
const { run: handleNoGo } = useThrottleFn(
async () => {
// 在视口中心生成禁扫区,大小 1.6m x 1.6m
const points = await mapApi.getForbiddenSweepZonePointsByViewportCenter({
size: 1.6,
});
// 自动偏移,避免与已有的禁扫区和禁拖区重叠
offsetPointsToAvoidOverlap(points, [
...forbiddenSweepZones.map((zone) => zone.points),
...forbiddenMopZones.map((zone) => zone.points),
]);
const newId = nanoid();
setForbiddenSweepZones([...forbiddenSweepZones, { id: newId, points }]);
setEditingForbiddenSweepZoneIds([newId]);
},
{ wait: 300, leading: true, trailing: false }
);
3. 添加禁拖区
禁拖区的实现与禁扫区类似,只是使用不同的 API 方法:
const { run: handleNoMop } = useThrottleFn(
async () => {
// 在视口中心生成禁拖区
const points = await mapApi.getForbiddenMopZonePointsByViewportCenter({
size: 1.6,
});
offsetPointsToAvoidOverlap(points, [
...forbiddenSweepZones.map((zone) => zone.points),
...forbiddenMopZones.map((zone) => zone.points),
]);
const newId = nanoid();
setForbiddenMopZones([...forbiddenMopZones, { id: newId, points }]);
setEditingForbiddenMopZoneIds([newId]);
},
{ wait: 300, leading: true, trailing: false }
);
4. 地图组件配置
在 WebViewMap 组件中配置虚拟墙和禁区的交互:
<WebViewMap
onMapReady={handleMapReady}
// 数据
virtualWalls={virtualWalls}
forbiddenSweepZones={forbiddenSweepZones}
forbiddenMopZones={forbiddenMopZones}
runtime={{
// 编辑状态
editingVirtualWallIds,
editingForbiddenMopZoneIds,
editingForbiddenSweepZoneIds,
// 隐藏路径
showPath: false,
}}
// 虚拟墙事件
onUpdateVirtualWall={handleUpdateVirtualWall}
onClickVirtualWall={handleClickVirtualWall}
onRemoveVirtualWall={handleRemoveVirtualWall}
// 禁拖区事件
onUpdateForbiddenMopZone={handleUpdateForbiddenMopZone}
onClickForbiddenMopZone={handleClickForbiddenMopZone}
onRemoveForbiddenMopZone={handleRemoveForbiddenMopZone}
// 禁扫区事件
onUpdateForbiddenSweepZone={handleUpdateForbiddenSweepZone}
onClickForbiddenSweepZone={handleClickForbiddenSweepZone}
onRemoveForbiddenSweepZone={handleRemoveForbiddenSweepZone}
/>
5. 事件处理
更新: 拖动或缩放时触发
const handleUpdateVirtualWall = (wall: VirtualWallParam) => {
setVirtualWalls(virtualWalls.map((w) => (w.id === wall.id ? wall : w)));
};
const handleUpdateForbiddenSweepZone = (zone: ZoneParam) => {
setForbiddenSweepZones(
forbiddenSweepZones.map((z) => (z.id === zone.id ? zone : z))
);
};
点击: 切换编辑状态
const handleClickVirtualWall = (wall: VirtualWallParam) => {
setEditingVirtualWallIds([wall.id]);
};
const handleClickForbiddenSweepZone = (zone: ZoneParam) => {
setEditingForbiddenSweepZoneIds([zone.id]);
};
删除: 移除禁区或虚拟墙
const handleRemoveVirtualWall = (removedId: string) => {
setVirtualWalls(virtualWalls.filter((w) => w.id !== removedId));
setEditingVirtualWallIds(
editingVirtualWallIds.filter((id) => id !== removedId)
);
};
6. 保存和取消
取消按钮: 恢复到进入页面时的状态
const handleReset = () => {
// 从 Redux store 中重新获取初始数据
const initialState = store.getState().mapState;
// 重置所有数据到初始状态
setVirtualWalls(initialState.virtualWalls);
setForbiddenSweepZones(initialState.forbiddenSweepZones);
setForbiddenMopZones(initialState.forbiddenMopZones);
// 清空所有编辑状态
setEditingVirtualWallIds([]);
setEditingForbiddenMopZoneIds([]);
setEditingForbiddenSweepZoneIds([]);
};
确定按钮: 下发指令保存到设备
import {
encodeVirtualArea0x38,
encodeVirtualWall0x12,
} from "@ray-js/robot-protocol";
import { PROTOCOL_VERSION } from "@/constant";
const handleConfirm = async () => {
// 编码禁区指令(禁扫区 + 禁拖区)
const zonesCommand = encodeVirtualArea0x38({
version: PROTOCOL_VERSION,
protocolVersion: 1,
virtualAreas: forbiddenSweepZones
.map((item) => ({
points: item.points,
mode: 1, // 禁扫区
name: "",
}))
.concat(
forbiddenMopZones.map((item) => ({
points: item.points,
mode: 2, // 禁拖区
name: "",
}))
),
origin: { x: 0, y: 0 },
});
// 编码虚拟墙指令
const virtualWallsCommand = encodeVirtualWall0x12({
version: PROTOCOL_VERSION,
origin: { x: 0, y: 0 },
walls: virtualWalls.map((item) => item.points),
});
// 下发指令
actions[commandTransCode].set(zonesCommand);
actions[commandTransCode].set(virtualWallsCommand);
// 清空编辑状态
setEditingForbiddenMopZoneIds([]);
setEditingForbiddenSweepZoneIds([]);
setEditingVirtualWallIds([]);
};
最佳实践
- 防止重叠:使用
offsetPointsToAvoidOverlap自动偏移新创建的禁区 - 节流处理:使用
useThrottleFn防止用户快速点击导致创建多个禁区 - 本地状态:编辑过程中使用本地 state,只在确定时下发指令
- 可撤销:提供取消按钮,允许用户恢复到初始状态
概述
房间编辑功能允许用户对地图上的房间进行管理,包括房间合并、房间分割、房间重命名和清扫顺序设置。这些功能帮助用户更好地组织和控制清扫任务。
状态管理
房间编辑使用多层状态管理,临时状态只在确定时才提交:
type RoomEditStatus = "normal" | "split" | "merge" | "reName" | "order";
// 编辑状态
const [roomEditStatus, setRoomEditStatus] = useState<RoomEditStatus>("normal");
const [enableRoomSelection, setEnableRoomSelection] = useState(false);
const [selectRoomIds, setSelectRoomIds] = useState<number[]>([]);
const [dividingRoomId, setDividingRoomId] = useState<number | null>(null);
// 房间选择模式
const [roomSelectionMode, setRoomSelectionMode] = useState<
"checkmark" | "order"
>("checkmark");
// 临时状态(未提交)
const [tempCleaningOrder, setTempCleaningOrder] = useState<
Record<number, number>
>({});
const [tempName, setTempName] = useState<Record<number, string>>({});
// 合并原始数据和临时状态
const finalRoomProperties = useMemo(() => {
return roomProperties.map((room) => ({
...room,
order: tempCleaningOrder[room.id] ?? room.order ?? 0,
name: tempName[room.id] ?? room.name ?? "",
}));
}, [roomProperties, tempCleaningOrder, tempName]);
核心功能实现
1. 房间合并
合并两个相邻的房间为一个:
/**
* 进入合并模式
*/
const handleMerge = async () => {
setEnableRoomSelection(true);
setSelectRoomIds([]);
setRoomEditStatus("merge");
setRoomSelectionMode("checkmark");
};
/**
* 点击房间选择逻辑
*/
const handleClickRoom = (room: RoomData) => {
if (roomEditStatus === "merge") {
if (selectRoomIds.includes(room.id)) {
// 取消选择
const newSelectRoomIds = selectRoomIds.filter((id) => id !== room.id);
setSelectRoomIds(newSelectRoomIds);
setActiveConfirm(newSelectRoomIds.length === 2);
} else {
if (selectRoomIds.length >= 2) {
// 只能合并两个房间
ToastInstance("只能选择两个房间进行合并");
return;
}
const newSelectRoomIds = [...selectRoomIds, room.id];
setSelectRoomIds(newSelectRoomIds);
setActiveConfirm(newSelectRoomIds.length === 2);
}
}
};
/**
* 确定合并
*/
const handleConfirmMerge = async () => {
// 检查房间是否相邻
const isAdjacent = await mapApi.areRoomsAdjacent(selectRoomIds);
if (!isAdjacent) {
ToastInstance.fail("只能合并相邻的房间");
return;
}
showLoading({ title: "" });
// 编码合并指令
const command = encodePartitionMerge0x1e({
roomIds: selectRoomIds,
version: PROTOCOL_VERSION,
});
actions[commandTransCode].set(command);
// 设置超时提示
timerRef.current = setTimeout(() => {
hideLoading();
ToastInstance.fail({ message: "合并失败" });
}, 20 * 1000);
};
关键点:
- 使用
mapApi.areRoomsAdjacent()检查房间是否相邻 - 最多只能选择两个房间
- 监听设备回复,处理成功/失败结果
2. 房间分割
在房间内绘制分割线,将其分成两个房间:
/**
* 进入分割模式
*/
const handleSplit = () => {
setActiveConfirm(false);
setRoomEditStatus("split");
setEnableRoomSelection(true);
setSelectRoomIds([]);
setRoomSelectionMode("checkmark");
};
/**
* 点击房间选择要分割的房间
*/
const handleClickRoom = (room: RoomData) => {
if (roomEditStatus === "split") {
setSelectRoomIds([room.id]);
setDividingRoomId(room.id); // 启用分割线绘制
setActiveConfirm(true);
}
};
/**
* 分割线更新时,检查是否有效
*/
const handleUpdateDivider = async () => {
const effectiveDividerPoints = await mapApi.getEffectiveDividerPoints();
if (!effectiveDividerPoints) {
setActiveConfirm(false); // 无效的分割线,禁用确定按钮
} else {
setActiveConfirm(true);
}
};
/**
* 确定分割
*/
const handleConfirmSplit = async () => {
// 获取有效的分割线点位
const points = await mapApi.getEffectiveDividerPoints();
const command = encodePartitionDivision0x1c({
roomId: dividingRoomId,
points,
origin: { x: 0, y: 0 },
version: PROTOCOL_VERSION,
});
actions[commandTransCode].set(command);
};
关键点:
- 设置
dividingRoomId后,地图组件会显示分割线 - 使用
mapApi.getEffectiveDividerPoints()获取分割线点位 - 检查房间数量是否超过限制(V1: 32, V2: 28)
3. 房间重命名
为房间设置自定义名称:
/**
* 进入重命名模式
*/
const handleRename = () => {
setRoomEditStatus("reName");
setEnableRoomSelection(true);
setSelectRoomIds([]);
setRoomSelectionMode("checkmark");
};
/**
* 点击房间显示重命名弹窗
*/
const handleClickRoom = (room: RoomData) => {
if (roomEditStatus === "reName") {
setSelectRoomIds([room.id]);
setShowRenameModal(true);
}
};
/**
* 重命名弹窗确定
*/
const handleRenameConfirm = (name: string) => {
setShowRenameModal(false);
setTempName({ ...tempName, [selectRoomIds[0]]: name });
setActiveConfirm(true);
};
/**
* 确定重命名
*/
const handleConfirmRename = async () => {
const { version } = store.getState().mapState;
const command = encodeSetRoomName0x24({
mapVersion: version,
version: PROTOCOL_VERSION,
rooms: Object.entries(tempName).map(([roomId, name]) => ({
roomId: Number(roomId),
name,
})),
});
actions[commandTransCode].set(command);
showLoading({ title: "" });
};
关键点:
- 使用
tempName存储未提交的房间名称 - 支持批量重命名(可以连续为多个房间命名后一次性提交)
- 提供预设标签(厨房、卫生间、客厅等)
4. 清扫顺序
设置房间的清扫先后顺序:
/**
* 进入排序模式
*/
const handleOrder = async () => {
setRoomEditStatus("order");
setEnableRoomSelection(true);
setSelectRoomIds([]);
setRoomSelectionMode("order"); // 使用顺序选择模式
};
/**
* 点击房间设置/取消顺序
*/
const handleClickRoom = (room: RoomData) => {
if (roomEditStatus === "order") {
const currentOrder =
finalRoomProperties.find((r) => r.id === room.id)?.order || 0;
setTempCleaningOrder((prev) => {
if (currentOrder > 0) {
// 取消顺序,其他房间顺序递减
const updates = { ...prev, [room.id]: 0 };
finalRoomProperties.forEach((r) => {
if (r.order > currentOrder) {
const originalOrder =
roomProperties.find((orig) => orig.id === r.id)?.order || 0;
updates[r.id] = (prev[r.id] ?? originalOrder) - 1;
}
});
return updates;
}
// 设置新顺序(追加到末尾)
const maxOrder = Math.max(0, ...finalRoomProperties.map((r) => r.order));
return { ...prev, [room.id]: maxOrder + 1 };
});
}
};
/**
* 确定排序
*/
const handleConfirmOrder = async () => {
const { version } = store.getState().mapState;
// 按顺序排列房间 ID
const roomIds = finalRoomProperties
.sort((a, b) => a.order - b.order)
.map((room) => room.id);
const command = encodeRoomOrder0x26({
version: PROTOCOL_VERSION,
roomIds,
mapVersion: version,
});
actions[commandTransCode].set(command);
showLoading({ title: "" });
};
关键点:
- 使用
roomSelectionMode: 'order'显示顺序数字 - 点击已设置顺序的房间可以取消
- 自动处理顺序的递增和递减
5. 地图组件配置
<WebViewMap
roomProperties={finalRoomProperties}
runtime={{
// 启用房间选择
enableRoomSelection,
selectRoomIds,
// 显示房间顺序数字
showRoomOrder: true,
// 分割模式下的房间 ID
dividingRoomId,
// 选择模式:checkmark(勾选)或 order(顺序)
roomSelectionMode,
// 隐藏路径
showPath: false,
}}
onMapReady={handleMapReady}
onMapFirstDrawed={handleMapFirstDrawed}
onClickRoom={handleClickRoom}
onClickRoomProperties={handleClickRoom}
onUpdateDivider={handleUpdateDivider}
/>
6. 设备回复处理
监听设备的指令回复,处理成功/失败状态:
useEffect(() => {
const handleRoomEditResponse = ({ cmd, command }) => {
if (timerRef.current) {
// 房间分割回复
if (cmd === PARTITION_DIVISION_CMD_ROBOT_V1) {
const splitResponse = decodePartitionDivision0x1d({ command });
if (splitResponse) {
clearTimeout(timerRef.current);
hideLoading();
handleNormal(); // 恢复正常状态
if (splitResponse.success) {
ToastInstance.success({ message: "分割成功" });
} else {
ToastInstance.fail({ message: "分割失败" });
}
}
}
// 房间合并回复
if (cmd === PARTITION_MERGE_CMD_ROBOT_V1) {
const mergeResponse = decodePartitionMerge0x1f({ command });
// ... 类似处理
}
// 房间重命名回复
if (cmd === SET_ROOM_NAME_CMD_ROBOT_V1) {
const roomNameResponse = decodeSetRoomName0x25({
command,
version: PROTOCOL_VERSION,
mapVersion: store.getState().mapState.version,
});
// ... 类似处理
}
}
};
emitter.on("receiveRoomEditResponse", handleRoomEditResponse);
return () => {
emitter.off("receiveRoomEditResponse", handleRoomEditResponse);
};
}, []);
定时功能使用 DP 定时-device_timer。
定时列表

通过 decodeDeviceTimer0x31 可以将定时 DP 解析为定时列表数据。
import { decodeDeviceTimer0x31 } from "@ray-js/robot-protocol";
type TimerData = {
effectiveness: number;
week: number[];
time: {
hour: number;
minute: number;
};
roomIds: number[];
cleanMode: number;
fanLevel: number;
waterLevel: number;
sweepCount: number;
roomNum: number;
};
const [timerList, setTimerList] = useState<TimerData[]>([]);
const dpDeviceTimer = useProps((props) => props[deviceTimerCode]);
useEffect(() => {
if (dpDeviceTimer) {
const { list } = decodeDeviceTimer0x31({
command: dpDeviceTimer,
version: PROTOCOL_VERSION,
}) ?? { list: [] };
setTimerList(list);
}
}, [dpDeviceTimer]);
对定时项可以进行删除/开关操作,可以使用 encodeDeviceTimer0x30 把新的定时列表转换为 DP 指令进行下发。
import { encodeDeviceTimer0x30 } from "@ray-js/robot-protocol";
import produce from "immer";
type TimerData = {
effectiveness: number;
week: number[];
time: {
hour: number;
minute: number;
};
roomIds: number[];
cleanMode: number;
fanLevel: number;
waterLevel: number;
sweepCount: number;
roomNum: number;
};
const [timerList, setTimerList] = useState<TimerData[]>([]);
// 删除一条定时
const deleteTimer = (index: number) => {
const newList = [...timerList];
newList.splice(index, 1);
const command = encodeDeviceTimer0x30({
list: newList,
version: PROTOCOL_VERSION,
number: newList.length,
});
actions[deviceTimerCode].set(command);
};
// 打开/关闭一条定时
const toggleTimer = (index: number, enable: boolean) => {
const newList = produce(timerList, (draft) => {
draft[index].effectiveness = enable;
});
const command = encodeDeviceTimer0x30({
list: newList,
version: PROTOCOL_VERSION,
number: newList.length,
});
actions[deviceTimerCode].set(command);
};
添加定时
添加定时同样使用 encodeDeviceTimer0x30 来组装指令。
// 添加一条定时
const addTimer = (newTimer: TimerData) => {
const newList = [newTimer, ...timerList];
const command = encodeDeviceTimer0x30({
list: newList,
version: PROTOCOL_VERSION,
number: newList.length,
});
actions[deviceTimerCode].set(command);
};

勿扰模式使用 DP 勿扰时间设置-disturb_time_set。
在设置完开关、开始时间、结束时间信息后,单击 保存 即可下发勿扰模式,通过 encodeDoNotDisturb0x40 可以将相关信息组装为 DP 指令。
import { encodeDoNotDisturb0x40 } from "@ray-js/robot-protocol";
// Add your custom logic here
// 保存下发勿扰模式信息
const handleSave = () => {
const command = encodeDoNotDisturb0x40({
// 勿扰开关
enable,
// 开始时间-小时
startHour,
// 开始时间-分钟
startMinute,
// 结束时间-小时
endHour,
// 结束时间-分钟
endMinute,
});
actions[commandTransCode].set(command);
};
同样,可以使用 decodeDoNotDisturb0x41 将设备上报的勿扰模式 DP 解析并呈现在页面上。
import { decodeDoNotDisturb0x41 } from "@ray-js/robot-protocol";
const dpDisturbTimeSet = useProps((props) => props[disturbTimeSetCode]);
// 勿扰模式dp解析为结构化数据
const { enable, startHour, startMinute, endHour, endMinute } =
decodeDoNotDisturb0x41(dpDisturbTimeSet) ?? DEFAULT_VALUE;
// Add your custom logic here
清扫记录列表
清扫记录数据的获取,请参考 清扫记录 API。
模板已经在 Redux 里封装了 cleanRecordsSlice 用于清扫记录数据的删改查,可以参考相关代码。
import {
deleteCleanRecord,
fetchCleanRecords,
selectCleanRecords,
} from "@/redux/modules/cleanRecordsSlice";
const records = useSelector(selectCleanRecords);
const handleDelete = (id: number) => {
dispatch(deleteCleanRecord(id));
};
useEffect(() => {
(dispatch as AppDispatch)(fetchCleanRecords());
}, []);
return (
<View className={styles.container}>
{records.map((record) => (
<Item key={record.id} data={record} onDeleted={handleDelete} />
))}
</View>
);
清扫记录详情
清扫记录详情页面展示单次清扫任务的完整信息,包括清扫时间、清扫面积、清扫模式以及对应的地图和路径。
数据获取
从 Redux store 获取清扫记录,并从云端下载对应的地图文件:
// 获取清扫记录
const { bucket, file, extendInfo } = useSelector((state: ReduxState) =>
selectCleanRecordById(state, Number(id))
);
const { mapLength, pathLength, cleanMode, time, area } = extendInfo;
// 从云端加载地图数据
useEffect(() => {
const fetchHistoryMap = async () => {
const mapData = await getMapInfoFromCloudFile({
bucket,
file,
mapLen: mapLength,
pathLen: pathLength,
});
if (mapData) {
const { originMap, originPath, virtualState } = mapData;
setMap(originMap);
setPath(originPath);
// 解析虚拟墙和禁区
setVirtualWalls(
virtualState.virtualWallData.map((points) => ({
points,
id: nanoid(),
}))
);
setForbiddenSweepZones(
virtualState.virtualAreaData.map(({ points }) => ({
points,
id: nanoid(),
}))
);
setForbiddenMopZones(
virtualState.virtualMopAreaData.map(({ points }) => ({
points,
id: nanoid(),
}))
);
}
};
fetchHistoryMap();
}, [bucket, file, mapLength, pathLength]);
地图渲染
使用 WebViewMap 组件渲染历史地图和路径:
<WebViewMap
map={map} // 地图数据
path={path} // 清扫路径
virtualWalls={virtualWalls} // 虚拟墙
forbiddenSweepZones={forbiddenSweepZones} // 禁扫区
forbiddenMopZones={forbiddenMopZones} // 禁拖区
/>
关键点:
- 通过
map和pathprops 直接传入历史数据,而非实时数据 - 地图组件会自动渲染虚拟墙和禁区
- 历史记录中的地图和路径为静态快照,不会更新
关于语音包数据的获取,请参考 机器语音 API。
import { getVoiceList } from "@ray-js/ray";
type Voice = {
auditionUrl: string;
desc?: string;
extendData: {
extendId: number;
version: string;
};
id: number;
imgUrl: string;
name: string;
officialUrl: string;
productId: string;
region: string[];
};
const [voices, setVoices] = useState<Voice[]>([]);
useEffect(() => {
const fetchVoices = async () => {
const res = await getVoiceList({
devId: getDevInfo().devId,
offset: 0,
limit: 100,
});
setVoices(res.datas);
};
fetchVoices();
}, []);
return (
<View className={styles.container}>
{voices.map((voice) => (
<Item key={voice.id} data={voice} deviceVoice={deviceVoice} />
))}
</View>
);
语音包的下发上报使用 DP 语音包数据下发-voice_data,可使用 @ray-js/robot-protocol 提供的 encodeVoice0x34 和 decodeVoice0x35 完成 DP 数据的组装和解析。
当下发使用某个语音包:
import { useActions } from "@ray-js/panel-sdk";
const actions = useActions();
const handleUse = () => {
actions[voiceDataCode].set(
encodeVoice0x34({
// id url md5 数据均来源于机器语音 API
id: extendData.extendId,
url: officialUrl,
md5: desc,
})
);
};
解析语音包上报的数据,获取语音包信息、下载进度、使用状态:
import { useProps } from "@ray-js/panel-sdk";
const dpVoiceData = useProps((props) => props[voiceDataCode]);
const { languageId, status, progress } = decodeVoice0x35({
command: dpVoiceData,
});
关于语音包的试听,可以参考 音频能力 中的方法。
手动控制是一般的 DP 下发功能,使用 DP 方向-direction_control。
模板已经封装了简易的手动控制组件及页面,请参考 src/pages/manual 页面。
import React, { FC, useEffect } from "react";
import {
View,
navigateBack,
onNavigationBarBack,
setNavigationBarBack,
} from "@ray-js/ray";
import Strings from "@/i18n";
import { Dialog, DialogInstance } from "@ray-js/smart-ui";
import { useActions } from "@ray-js/panel-sdk";
import { directionControlCode, modeCode } from "@/constant/dpCodes";
import ManualPanel from "@/components/ManualPanel";
import styles from "./index.module.less";
const Manual: FC = () => {
const actions = useActions();
useEffect(() => {
ty.setNavigationBarTitle({
title: Strings.getLang("dsc_manual"),
});
// 进入远程控制需要下发手动模式
actions[modeCode].set("manual");
setNavigationBarBack({ type: "custom" });
onNavigationBarBack(async () => {
try {
await DialogInstance.confirm({
context: this,
title: Strings.getLang("dsc_tips"),
icon: true,
message: Strings.getLang("dsc_exit_manual_tips"),
confirmButtonText: Strings.getLang("dsc_confirm"),
cancelButtonText: Strings.getLang("dsc_cancel"),
});
actions[directionControlCode].set("exit");
setNavigationBarBack({ type: "system" });
setTimeout(() => {
navigateBack();
}, 0);
} catch (err) {
// do nothing
}
});
return () => {
setNavigationBarBack({ type: "system" });
};
}, []);
return (
<View className={styles.container}>
<ManualPanel />
<Dialog id="smart-dialog" />
</View>
);
};
export default Manual;
模板已内置一个 视频监控 页面。
具体可参考 IPC 通用模板 教程。
- 恭喜你 🎉 完成了本教程的学习!
- 有任何问题可以联系涂鸦智能小程序团队。