快速入门
本文介绍激光扫地机品类的 Demo 如何编译、如何运行程序以及验证基础功能。其它品类如无边界割草机、泳池机及宠物类机器人的编译、运行及验证基础功能基本类似,本文不再介绍。
前置条件
在 Visual Studio Code 的 Tuya Wind IDE 上,以 TuyaOS SDK 开发模式,获取基于 X86_64 开发平台的类型开发包。更多信息,参考 获取开发资料。
目录结构
software/TuyaOS 目录结构及顶层文件简介如下:
| 名称 | 说明 |
|---|---|
| apps | 应用代码。 |
| build | 编译配置目录,存放编译配置文件,您无需关注。 |
| include | 头文件。 |
| libs | 库文件。 |
| Makefile | Makefile 文件。 |
| output | 编译产物输出目录。 |
| scripts | 编译框架,您无需关注。 |
| vendor | 开发环境,开发环境是执行编译时在线下载到本地的。 |
| build_app.sh | 编译脚本。 |
应用修改
-
将您在 涂鸦开发者平台 上创建的激光扫地机产品的 PID、UUID 和 KEY 填入到如下内容中:
您填入的 UUID 不能与其它设备重复,保证唯一性。
/*******pid uuid authkey 此处仅供测试使用************/ CHAR_T s_ty_pid[64]= "PID 值"; //设备 PID,需要使用设备自身的 PID。 CHAR_T s_ty_uuid[64]="UUID 值";//设置 UUID,按照授权信息填写。注意 UUID 是与设备绑定的,具有唯一性。 CHAR_T s_ty_authkey[64]="KEY 值";//设置 Authkey,按照授权信息填写。注意 Authkey 是与 UUID 一一对应。 /*******pid uuid authkey 此处仅供测试使用************/ -
创建一个可以断电保存的存储路径,用来保存设备配网激活等相关参数,实现方式如下:
#define TY_APP_STORAGE_PATH "/tmp/" //测试使用虚拟存储路径 #define TY_SDK_ONLINE_LOG_PATH "/tmp/" //测试使用虚拟存储路径 /*准备文件系统读写存储路径,真实的设备需要填写设备本地分配的路径*/ TY_INIT_PARAMS_S init_param = {0}; init_param.init_db = TRUE; strcpy(init_param.sys_env, TARGET_PLATFORM); strcpy(init_param.log_seq_path, TY_SDK_ONLINE_LOG_PATH); //SDK 在线日志保存的路径 TUYA_CALL_ERR_LOG(tuya_iot_init_params(TY_APP_STORAGE_PATH, &init_param));//SDK DATA_BASE 文件存储路径
编译方式
方式一:可视化界面
在 Tuya Wind IDE 界面上选择 software/TuyaOS/apps/ 下的 Demo 目录,单击鼠标右键,选择菜单 Build Project 一键编译。
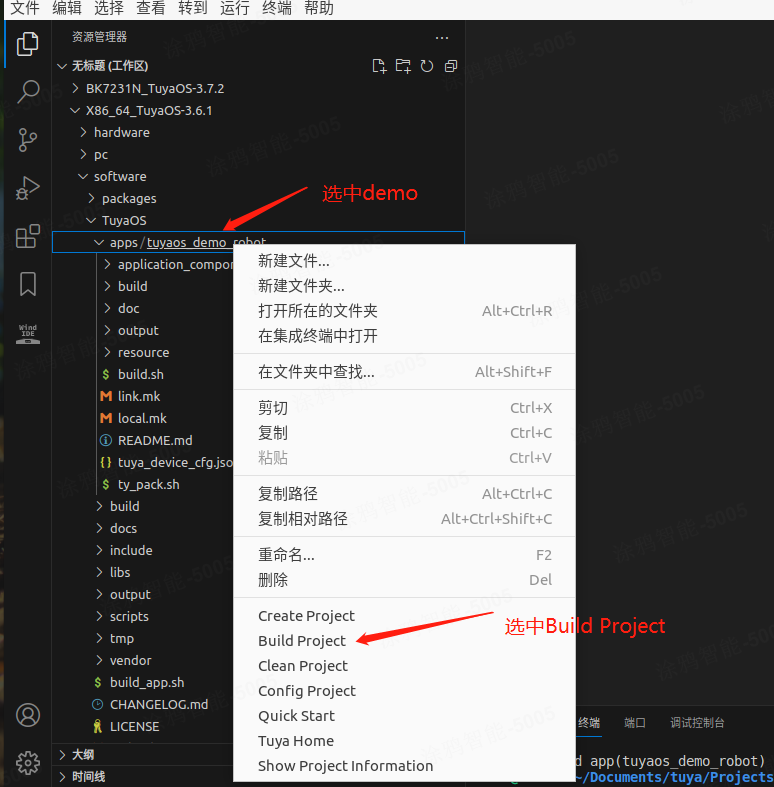
输入版本号(格式为 X.X.X,其中 X 是任意数字)后,按回车键,即开始编译。

方式二:Shell 脚本形式
在 software/TuyaOS/ 目录下输入:
./build_app.sh $1 $2 $3 $4
其中,
$1:应用工程路径,例如apps/tuyaos_demo_robot/$2:生成的应用工程名,例如tuyaos_demo_robot$3:版本号,三段式格式XX.XX.XX,例如1.0.0$4:用户指令 (可选),例如clean
方式三:Makefile 形式
在 software/TuyaOS/ 目录下命令行输入 make,选择要编译的应用程序。
运行程序
启动命令推荐:
./output/x86_64_tuyaos_demo_rvc/firmware/tuyaos_demo_robot -m 0 -t AYGFnn3je2Fi7I -r ./apps/tuyaos_demo_rvc
-
m:对应模式。Demo 运行请选择 AP 配网,对应的值为0。/* Tuya SDK definition of Wi-Fi start mode */ typedef BYTE_T GW_WF_START_MODE; #define WF_START_AP_ONLY 0 // only have ap-cfg mode #define WF_START_SMART_ONLY 1 // only have smart-cfg mode #define WF_START_AP_FIRST 2 // have both ap-cfg and smart-cfg. default is ap-cfg mode #define WF_START_SMART_FIRST 3 // have both ap-cfg and smart-cfg. default is smart-cfg mode #define WF_START_SMART_AP_CONCURRENT 4 // ap-cfg and smart-cfg is concurrent -
t:传入指定 Token。- 打开涂鸦智能 App,单击右上角 + > 添加设备。
- 选择 小家电 > 清洁 > 扫地机器人(摄像机),输入 Wi-Fi 账号密码(需与 Demo 运行环境 Wi-Fi 保持一致)。
- 单击 下一步 出现配网二维码,使用微信或其他应用扫码解析,获取类似于以下的数据:
{"s":"N234","p":"12345678","t":"AYAq3v9OLa4FN9"}其中
t对应的内容是 Token。Token 的有效期为 10 分钟,且配网成功后就会失效。再次配网时,需要重新获取 Token。
您填入的 Token 只是 Demo 测试用,实际产品开发时,您无需传入 Token 值。 -
r:源文件目录。需上报的地图、路径等数据所在目录。Demo 已经实现,您无需修改。
功能验证
本章节主要验证 Demo 的基础功能。在此之前,需要关注如下函数。这些函数注册到 TuyaOS SDK 里,进行状态或者数据的接收。
| 函数 | 说明 |
|---|---|
| ty_sdk_net_status_change_cb | Wi-Fi 状态回调函数 |
| tuya_sweeper_event_cb | 实时地图及路径传输的状态回调函数 |
| ty_cmd_handle_dp_cmd_objs | Obj DP 交互功能 |
| ty_cmd_handle_dp_raw_objs | Raw DP 交互功能 |
| ty_user_upgrade_inform_cb | OTA 升级调用的回调函数 |
| ty_dev_upgrade_pre_check_cb | OTA 升级前检查回调函数 |
| ty_sdk_app_reset_cb | App 移除回调函数 |
-
设备配网及云端接入成功之后,手机 App 上显示图标如下:

您可以根据
ty_sdk_net_status_change_cb函数回调的状态判断是否接入云端,日志交互的打印如下:
-
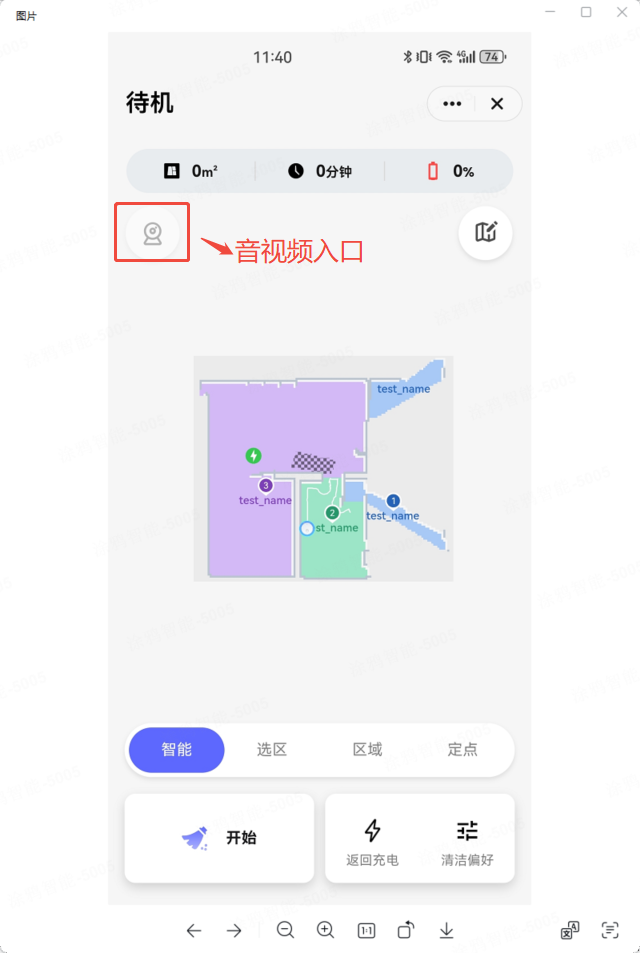
进入面板之后,开始实时地图及路径传输,首页界面如下:
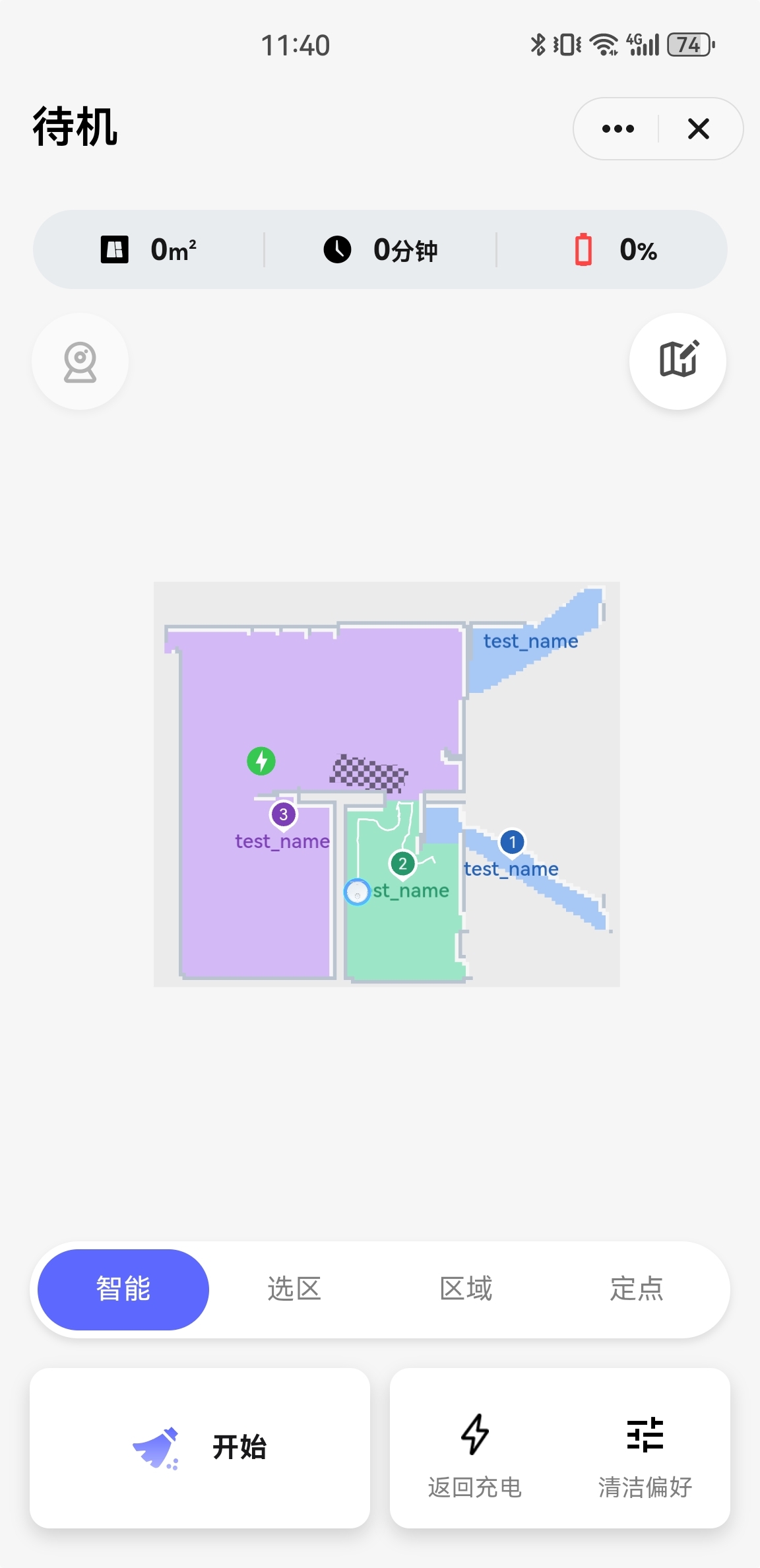
实时地图及路径数据上报,是需要在
tuya_sweeper_event_cb回调里获取到下载事件,并进行异步上报,实时地图及路径上报的日志如下: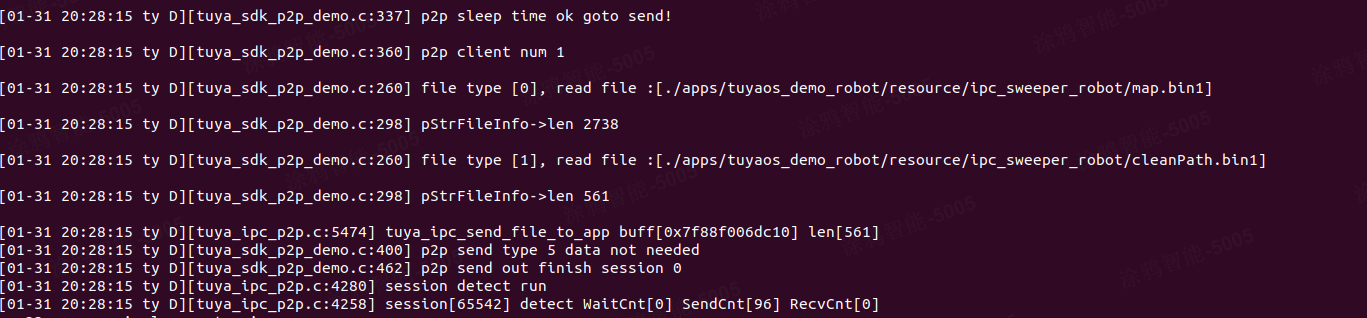
-
Obj DP 交互验证,在手机端单击开始清扫的按钮,首页界面如下:

Obj DP 交互使用
ty_cmd_handle_dp_cmd_objs回调函数,手机 App 下发的 DP 需要得到设备端正确的回复,手机 App 才会相对应的显示。日志打印如下: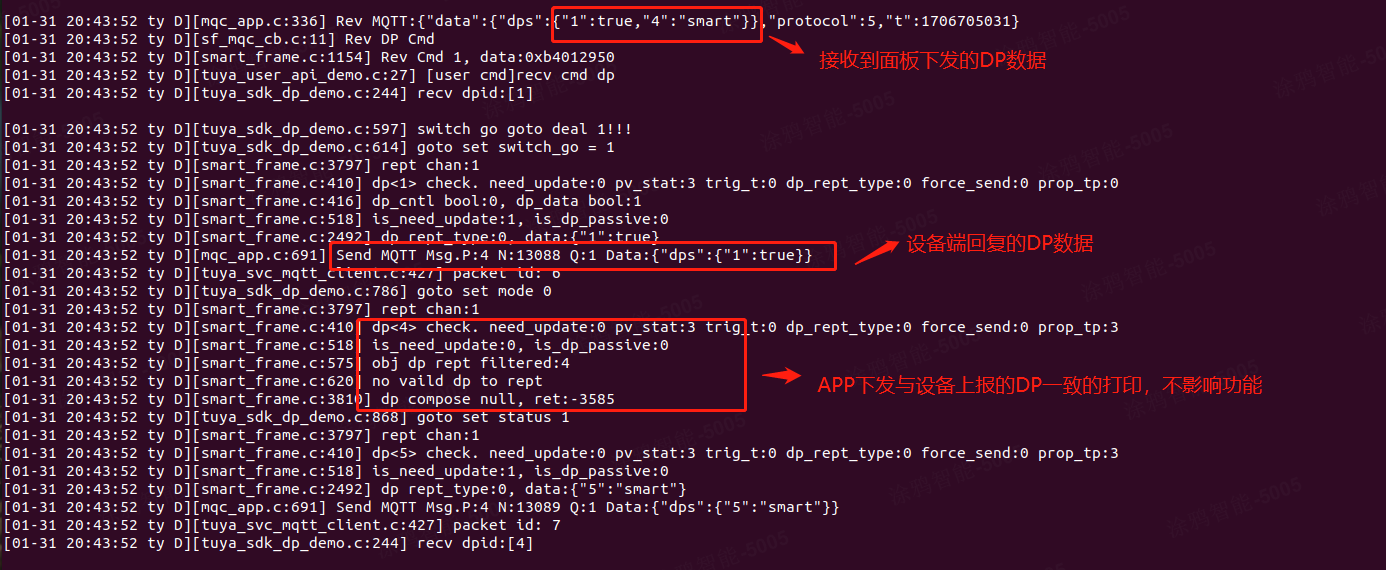
-
Raw DP 交互验证,在手机端单击指哪扫哪清扫,首页界面如下:

Raw DP 交互使用
ty_cmd_handle_dp_raw_objs回调函数。日志打印如下: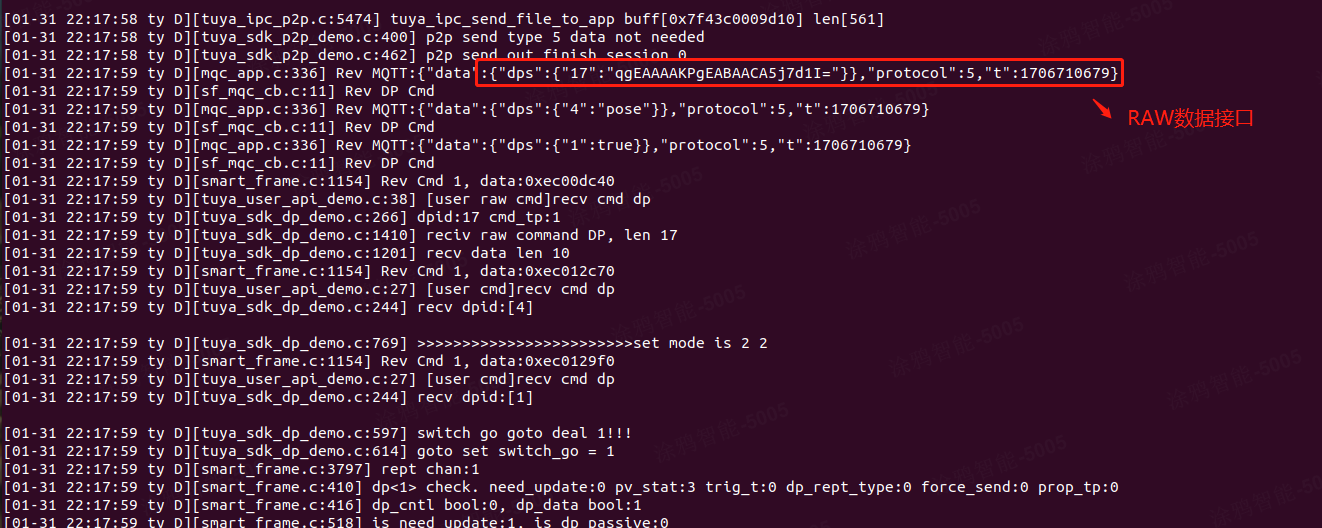
-
设备 OTA 升级,参考 固件管理,填写固件信息。之后,App 会提示有可升级固件及更新如下:


OTA 升级使用
ty_user_upgrade_inform_cb回调来接收数据,日志打印如下: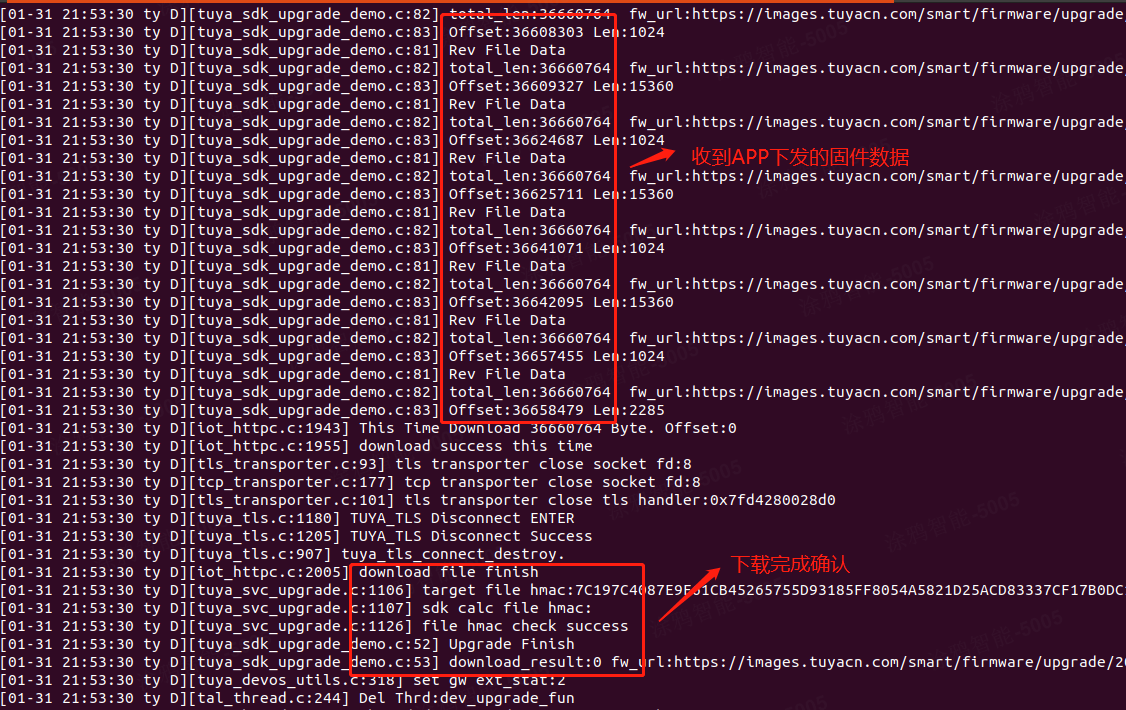
-
设备移除功能,您可以长按 App 上的扫地机图标,出现界面如下:
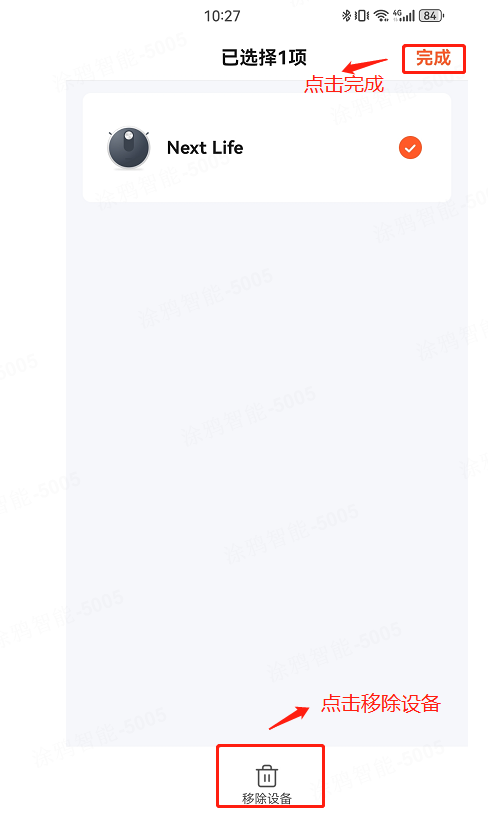
移除设备调用的是
ty_sdk_app_reset_cb接口,设备移除成功后,日志打印如下: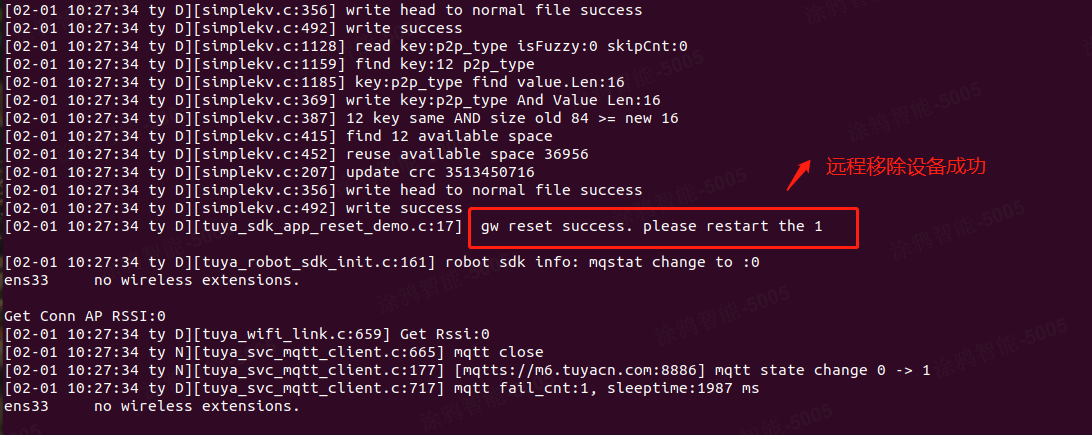
-
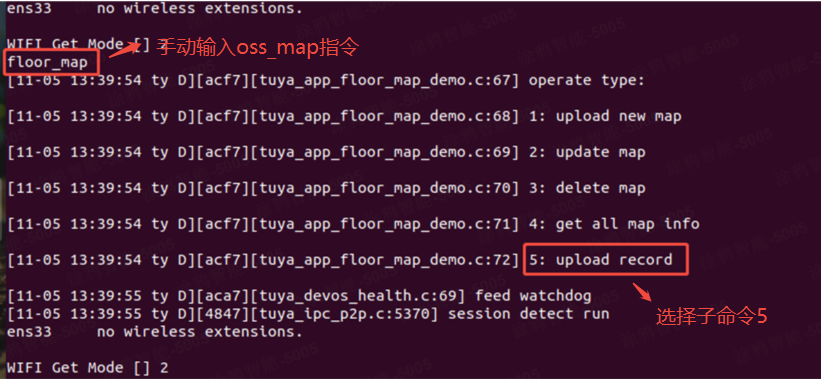
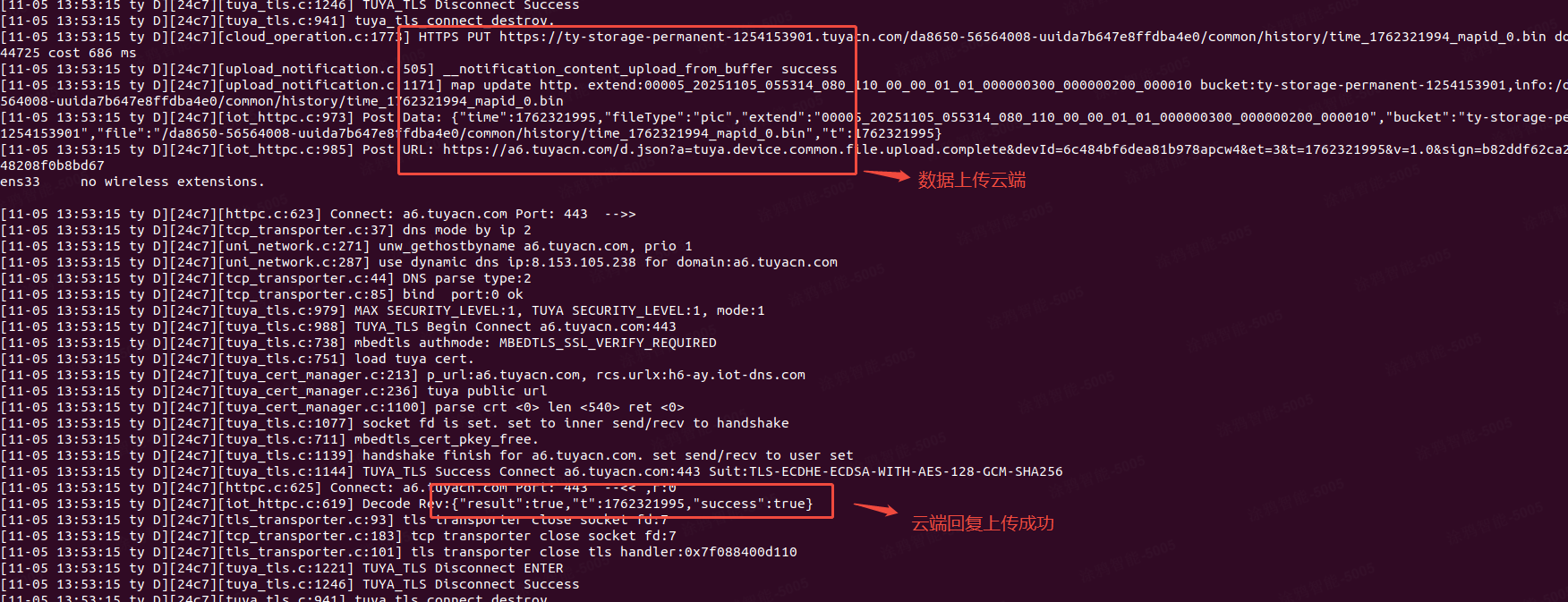
历史数据上报功能,需要您在程序运行的终端中输入
oss_map指令,子命令选择5清扫记录上报,界面显示如下:
其它相关的历史数据上报功能,参考 Demo 的注释进行验证。清扫记录日志打印如下:
-
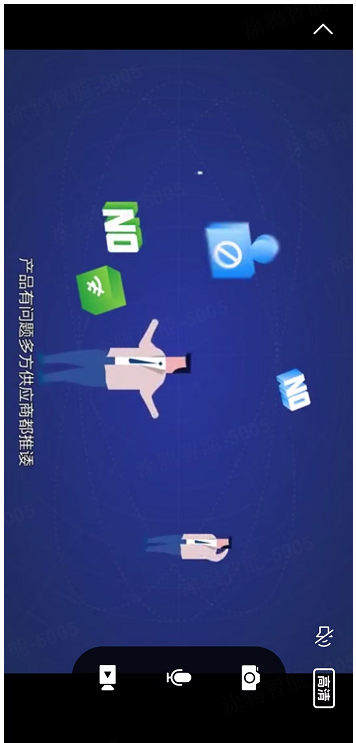
音视频功能测试,需要开发者的产品 PID 带有音视频能力,可参考音视频能力开启该功能。设备上线后,开发者进入面板点击视频入口,可预览视频。
-
其他功能,请参考 Demo 上的注释开发者自行验证。
该内容对您有帮助吗?
是意见反馈该内容对您有帮助吗?
是意见反馈





