音视频能力
本文主要介绍机器人设备视频实时预览及音频对讲等功能接入流程。
功能说明
音视频功能是机器人的 高级能力,是 收费选项,请参考下文介绍的流程来添加 高级能力。
添加高级功能
-
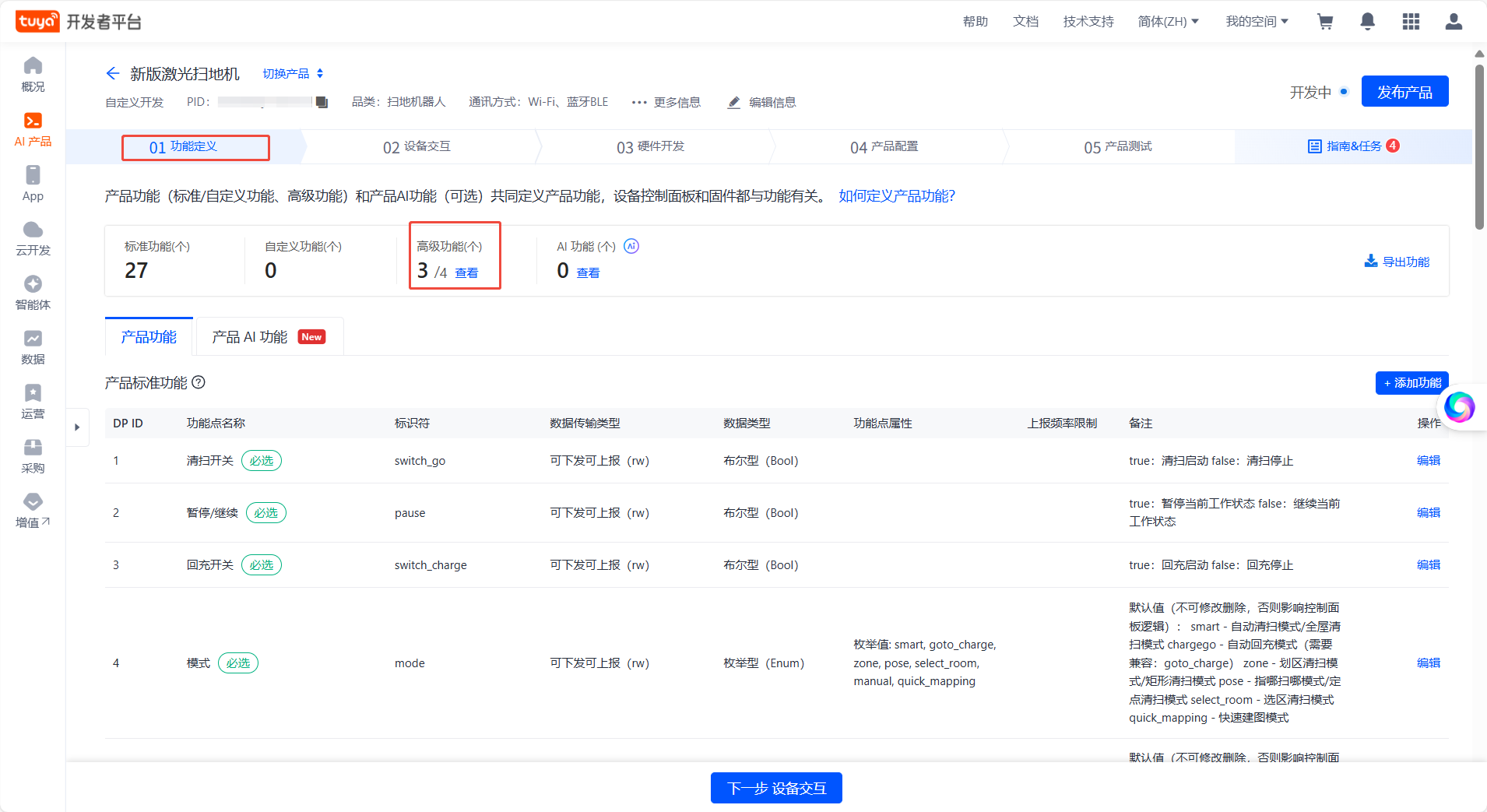
进入产品的开发页面,查看 01 功能定义 下的 高级功能。
-
在 产品高级功能 下,开启 机器人音视频业务能力。

申请高级能力对应的授权码
在同一个产品的开发页面 > 03 硬件开发 下,购买 授权码,如下图所示。更多信息,请参考 获取授权码。

功能接入流程
机器人的音视频业务,基本都涉及到网络、时间等基础业务。因此,正常的音视频业务需要等待 MQTT 上线并且同步到时间后,才能进行推音视频流数据。机器人的各品类接入的流程类似,下面通过激光扫地机品类的接入流程,来介绍该功能。
参考下图:
API
初始化媒体抽象层
/***********************************************************
*@function: ty_rvc_media_adapter_init
*@brief initialize tuya sdk for media adapter
*@param[in] p_media_adatper_info: TY_SDK_MEDIA_ADAPTER_S
*@param[in] p_media_infos: DEVICE_SDK_MEDIA_INFO_S
*@return OPRT_OK on success. Others on error, please refer to tuya_error_code.h
***********************************************************/
OPERATE_RET ty_rvc_media_adapter_init(TY_SDK_MEDIA_ADAPTER_S* p_media_adatper_info, DEVICE_SDK_MEDIA_INFO_S* p_media_infos);
以上接口是 App 传到设备端的音视频数据回调和设备获取快照数据传回 App 的回调注册,音视频编解码配置参数的输入。
初始化环形缓冲区
/***********************************************************
*@function: ty_rvc_media_ring_buffer_init
*@brief initialize media ring buffer init
*@param[in] pMediaInfo: DEVICE_SDK_MEDIA_INFO_S
*@param[in] max_buffer_seconds: buffer timer 6~10S
*@param[in] channel: media channel
*@return OPRT_OK on success. Others on error, please refer to tuya_error_code.h
***********************************************************/
OPERATE_RET ty_rvc_media_ring_buffer_init(CONST DEVICE_SDK_MEDIA_INFO_S* pMediaInfo, INT_T max_buffer_seconds, INT_T channel);
以上接口是针对特定视频通道的特定码流,执行初始化。该操作会执行缓存空间的创建与节点的初始化。关于环形缓存区其它接口的使用,参考 音视频环形缓存。
注册音视频 P2P 事件回调
/***********************************************************
*@function: ty_rvc_media_av_event_init
*@brief: sdk audio and video registration callback int
*@param [in] event_cb: audio and video stream trans cb
*@return [*]OPRT_OK on success. Others on error, please refer to tuya_error_code.h
***********************************************************/
OPERATE_RET ty_rvc_media_av_event_init(RVC_AV_STREAM_EVENT_CB event_cb);
以上接口是音视频 P2P 事件注册回调,是将视频实时预览和音频对讲等事件传到设备端,让用户做出相应的业务处理。具体的事件,参考激光扫地机 Demo 中的 tuya_sweeper_av_event_cb 函数实现。
下面对部分事件做流程解释:
设备媒体服务初始化
/**
* @brief real time map and path trans cb
*/
typedef INT_T (*RVC_TRANS_EVENT_CB)(IN CONST int onoff);
/***********************************************************
*@Function: ty_rvc_server_init
*@brief initialize media server init
*@param[in] handler The status callback for real-time data transmission,
with statuses including: start and end.
*@return OPRT_OK on success. Others on error, please refer to tuya_error_code.h
***********************************************************/
OPERATE_RET ty_rvc_server_init(RVC_TRANS_EVENT_CB handler);
以上接口是初始化媒体服务,只有启动该接口,才能正常的音视频拉流。
使用示例
/**
* @brief 创建音视频推流任务
* @param
* @return [*]
*/
void tuya_av_start(void)
{
#define TY_DSP_MEDIA_AUDIO_MAX 1 //音频采集,支持 1 路
#define TY_DSP_MEDIA_VI_MAX 1 //视频输入,支持 1 路
#define TY_DSP_MEDIA_VENC_MAX 4 //视频编码,使用 4 路
//以下音视频初始化是基于 x86 的虚拟设备,硬件资源填 NULL。
PR_DEBUG("create av task!!!\n");
int ret = 0;
ret = tal_vi_init(NULL, TY_DSP_MEDIA_VI_MAX); //tal 调用的是底层 TKL 硬件视频采集初始化接口
if (0 != ret) {
PR_ERR("tal_vi_init failed,%d\n", ret);
return ;
}
ret = tal_venc_init(0, NULL, TY_DSP_MEDIA_VENC_MAX); //tal 调用的是底层 TKL 视频编码初始化接口
if (0 != ret) {
PR_ERR("tal_venc_init failed,%d", ret);
return ;
}
ret = tal_ai_init(-1, TY_DSP_MEDIA_AUDIO_MAX); //tal 调用的是底层 TKL 硬件音频采集初始化接口
if (0 != ret) {
PR_ERR("tal_ai_init failed,%d", ret);
return ;
}
//您需要根据自己的硬件资源完成初始化,可参考下面的 “视频采集” 和 “音频采集与播放” 的知识链接。
/*创建线程*/
pthread_t main_pid = -1;
pthread_t sub_pid = -1;
pthread_t audio_pid = -1;
pthread_create(&main_pid, NULL, __video_main,NULL);
pthread_create(&sub_pid, NULL, __video_sub,NULL);
pthread_create(&audio_pid, NULL, __audio_main,NULL);
return ;
}
以上示例来源于激光扫地机 Demo,该示例是基于 x86 平台实现简单的音视频推流功能。用户开发音视频功能时,需要根据自身硬件平台来配置参数。更多信息,参考 视频采集 和 音频采集与播放。
Demo 中如要开启音视频功能,需将 TY_ROBOT_MEDIA_ENABLE 宏置 1 ,默认是关闭状态。
了解更多
常见注意事项
- 视频监控:通过 DP 来控制实时视频开关。
- 当设备端上报音视频开关
DP(live_video_switch)为false时,点击视频监控,弹窗提示:实时视频未开启。 - 当设备端上报音视频开关
DP(live_video_switch)为true时,点击视频监控,根据有无密码再进入视频监控模式。有密码即验证,无密码则直接打开视频。
- 当设备端上报音视频开关
- 面板端视频关闭逻辑:
- 面板端只能关闭实时视频开关,无法直接打开实时视频。(打开实时视频开关,只能通过设备端操作。如连续点击多次回充机械按钮后,会上报一个
DP(live_video_switch)为true)。 - 如果有本地相册功能,面板关闭视频监控不会删除相册内的视频或者截图。如果您需要删除,只能进入 App 相册内进行删除操作。
- 面板端只能关闭实时视频开关,无法直接打开实时视频。(打开实时视频开关,只能通过设备端操作。如连续点击多次回充机械按钮后,会上报一个
常见问题
App 预览视频时,一直卡顿且日志报错 "Check_Buffer not enough"?
当系统打印 Check_Buffer 日志时,表明网络质量过差,导致视频流发送失败。请检查网络。
App 打开视频时,视频界面显示绿屏?
可能是由于视频数据解析异常,进而出现绿屏现象。解码时支持网络抽象层(NAL)单元,其起始码为 4 字节,以 0x00, 0x00, 0x00, 0x01 开头。请检查起始码是否符合规范。
该内容对您有帮助吗?
是意见反馈该内容对您有帮助吗?
是意见反馈





