TAU1113 模组规格书
产品概述
产品简介
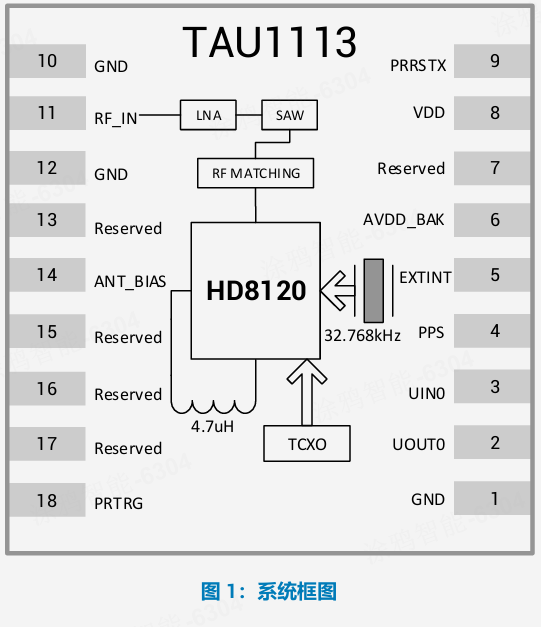
TAU1113 是一款低成本、高性价比的双模定位模组,搭载了华大北斗的 CYNOSURE III Lite GNSS SoC 芯片,支持接收 BDS B1I、B1C、GPS L1C/A 等卫星信号。TAU1113 尺寸小、集成度高且易于应用,非常适合对成本要求高的 GNSS 规模应用。
产品特性
- 10.1mmx9.7mm 小尺寸、低功耗、低成本、高性价比
- 支持单系统独立定位和多系统联合定位
- 支持 A-GNSS 辅助定位功能
- 兼容主流 GPS 模块,节省替换成本
- 支持有源天线检测与保护
表格 1 TAU1113
| 产品型号 | GNSS | 特色功能 | 接口 | 精度 | 等级 | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 单频 S/双频 D/三频 T | GPS/QZSS | BDS | GLONASS | Galileo | IRNSS | 内置 LNA | 可编程(Flash) | 数据记录 | D-GNSS | Oscillator | UART | I2C | USB | SPI | 米 | 亚米 | 厘米 | 工业级 | 车规级 | |
| TAU1113-1010A00 | S | ● | ● | ● | ● | ● | ● | T | ● | ○ | ● | ● | ||||||||
- T=TCXO
- ● = 支持
- ○ = 特殊固件支持
系统框图
性能指标
表格 2 性能指标
| 类别 | 性能指标 | ||
|---|---|---|---|
| GNSS 通道总数 | 88 | ||
| 卫星接收频段 | GPS/QZSS: L1C/A | ||
| BDS: B1I,B1C | |||
| 数据更新率 | 最大 5Hz | ||
| 定位精度[1] | GNSS | 1.5m CEP | |
| 速度及时间精度 | GNSS | 0.1m/s CEP | |
| 1PPS | 20ns | ||
| 首次定位时间 | 热启动 | 1s | |
| 冷启动 | 28s | ||
| 冷启动 | -148dBm | ||
| 热启动 | -156dBm | ||
| 灵敏度[2] | 重捕获 | -158dBm | |
| 追踪 | -163dBm | ||
| 应用极限 | 速度 | 515m/s | |
| 高度 | 18,000m | ||
| 天线检测 | 内置天线短路保护,开路检测 | ||
| 通信接口 | UART | 1 | |
| I2C[3] | 1 | ||
| 数据格式 | NMEA 0183 协议 Ver. 3.01/4.00/4.10(默认) Cynosure GNSS 接收机协议 | ||
| 工作情况 |
主电源电压 | 2.0V ~ 3.63V | |
| I/O 电压 | 2.0V ~ 3.63V | ||
| 备电电压 | 1.8V ~ 3.63V | ||
| 功耗 |
追踪 | GPS/QZSS+BDS | 16mA@3.3V |
| GPS/QZSS | 16mA@3.3V | ||
| 捕获 | GPS/QZSS+BDS | 18mA@3.3V | |
| GPS/QZSS | 16mA@3.3V | ||
| 待机模式 | 15uA@3.3V | ||
| 工作温度 | -40°C ~ +85°C | ||
| 储存温度 | -40°C ~ +85°C | ||
| 封装尺寸 | 10.1×9.7×2.5mm 邮票孔封装 | ||
| 符合标准 | RoHS, REACH, FCC, CE-RED | ||
- [1] 开阔天空
- [2] 测试时需使用高性能外部 LNA
- [3] 特殊固件支持
模块引脚定义
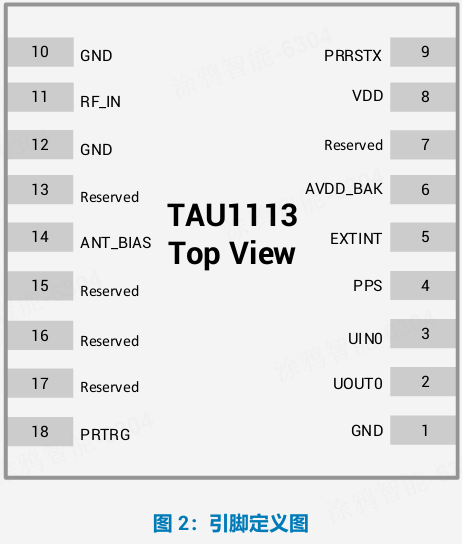
表格 3 引脚定义说明
| 功能 | 引脚名称 | 引脚编号 | 信号类型 | 描述 | |||
|---|---|---|---|---|---|---|---|
| 电源 | VDD | 8 | Power | 主电源输入。确保电源输入干净稳定。 | |||
| GND | 8 | VSS | 确保模块的所有 GND 引脚均良好接地。 | ||||
| AVDD_BAK | 6 | Power | 备用电源输入。建议将备用电源电压连接到 AVDD_BAK引脚,以便定位模块实现热启动和温启动功能。确保 AVDD_BAK 有电源输入,否则系统将不能正常工作。如果无备用电源,可将 AVDD_BAK 连接到主电源。 | ||||
| 天线 | RF_IN | 11 | I | 天线输入,阻抗 50Ω | |||
| ANT_BIAS | 14 | O | 天线偏置电压输出,可供外部有源天线电源使用。 有源天线电流不能超过 25mA。 |
||||
| 串口 | UIN0 | 3 | I | UART 输入 | |||
| UOUT0 | 2 | O | UART 输出 | ||||
| 其他 | PRTRG | 18 | I | 工作模式选择,或唤醒信号输入 | |||
| PRRSTX | 9 | I | 外部复位信号输入,低电平有效 | ||||
| PPS | 4 | O | 秒脉冲信号,如未使用保持悬空 | ||||
| EXTINT | 5 | I | 外部中断输入,如未使用保持悬空 | ||||
| Reserved | 7, 13, 15,16, 17 | - | 自定义,如未使用保持悬空 | ||||
电气特性
极限条件
表格 4 极限条件
| 符号 | 参数 | 最小值 | 最大值 | 单位 |
|---|---|---|---|---|
| VDD | 主电源电压 | -0.5 | 3.63 | V |
| AVDD_BAK | 备份电源电压 | -0.5 | 3.63 | V |
| VImax | I/O 引脚输入电压 | -0.5 | 3.6 | V |
| Tstorage | 存储温度 | -40 | 85 | °C |
| Tsolder | 回流焊温度 | - | 260 | °C |
| VESD (HBM) | 最大可承受 ESD 水平 | - | 2000 | V |
IO 端口特性
PRRSTX、PRTRG 端口特性
表格 5 PRRSTX、PRTRG 端口特性
| 符号 | 参数 | 条件 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|---|---|
| IIZ | 漏电流输入 | - | - | - | +/-1 | uA |
| VIH | 高电平输入电压 | - | AVDD_BAK* 0.67 | - | AVDD_BAK | V |
| VIL | 低电平输入电压 | - | 0 | - | AVDD_BAK*0.27 | V |
| VOH | 高电平输出电压 | IOH = 5.3mA, AVDD_BAK = 3.3V | 2.64 | - | - | V |
| IOH = 1.2mA, AVDD_BAK = 1.8V | 1.53 | - | - | V | ||
| VOL | 低电平输出电压 | IOL = 3.9mA, AVDD_BAK = 3.3V | - | - | 0.4 | V |
| IOL = 1.9mA, AVDD_BAK = 1.8V | - | - | 0.45 | V | ||
| Ci | 输入电容 | - | - | - | 11 | pF |
| RPU | 上拉电阻 | - | 35 | - | 84 | kΩ |
其他 IO 端口特性
表格 6 其他 IO 端口特性
| 符号 | 参数 | 条件 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|---|---|
| IIZ | 漏电流输入 | - | - | - | +/-1 | uA |
| VIH | 高电平输入电压 | - | VDD*0.67 | - | VDD | V |
| VIL | 低电平输入电压 | - | 0 | - | VDD*0.27 | V |
| VOH | 高电平输出电压 | IOH = 5.3mA, VDD = 3.3V | 2.64 | - | - | V |
| VOL | 低电平输出电压 | IOL = 3.9mA, VDD = 3.3V | - | - | 0.4 | V |
| Ci | 输入电容 | - | - | - | 11 | pF |
| RPU | 上拉电阻 | - | 35 | - | 84 | kΩ |
直流特性
工作条件
表格 7 工作条件
| 符号 | 参数 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|---|
| VDD | 主电源电压 | 2.0 | 3.3 | 3.63 | V |
| AVDD_BAK | 备份电源电压 | 1.8 | 3.3 | 3.63 | V |
| ICCmax | VDD 上最大操作电流 | - | - | 200 | mA |
| Tenv | 工作环境温度 | -40 | - | 85 | °C |
| VANT_BIAS | 天线偏置电压 | - | VDD-0.15[1] | - | V |
[1] 高温、低温、常温环境;数值偏差±0.1V。
功耗
表格 8 功耗
| 工作模式 | 状态 | 条件 | 典型值 | 单位 |
|---|---|---|---|---|
| 运行模式(GPS/QZSS+BDS) | 追踪 | VDD[1] | 16 | mA |
| 捕获 | 18 | mA | ||
| 运行模式(GPS/QZSS) | 追踪 | VDD[1] | 16 | mA |
| 捕获 | 16 | mA | ||
| 待机模式 | - | AVDD_BAK[2] | 15 | uA |
- [1] 条件:VDD = 3.3V,室内温度,全部引脚悬空。
- [2] 条件:AVDD_BAK = 3.3V,室内温度,全部引脚悬空。
功能描述
电源
为了保证定位的性能,应尽量控制模块电源的纹波,建议使用通流在 100mA 以上的 LDO 供电。
备用电源作用于模块的基本电源管理系统,并让模块能在主电切断后保持用于热启动的星历数据。若需要单独给备电供电,请保证供电电压大于或等于主电电压。
如无可用备用电源,请将 AVDD_BAK 连接至主电 VDD,不能悬空。
天线
本模块的射频部分内置 LNA 和 SAW,外部推荐连接有源天线,天线的增益不超过 30dB。
模块内置有源天线检测与天线过流保护功能,可以检测有源天线正常连接、开路和短路的状态,并以 NMEA 数据发出提示信息。
复位与工作模式控制
本 GNSS 定位模块的工作模式由操作 PRRSTX 和 PRTRG 两个引脚控制。模块正常工作情况下,PRTRG 单独不起作用,PRRSTX 起到系统复位的作用,设计时请务必保留 PRTRG 和 PRRSTX 接口,以保证空芯片时能进入 Boot 模式。
- 模块上电或 PRRSTX 接受上升沿时,系统将产生外部复位(如果 AVDD_BAK 不断电,该复位不会影响备电区域的星历数据)。
- 如果在模块发生复位时 PRTRG 检测到低电平输入,模块将在 PRTRG 的低电平释放到悬空状态时进入升级模式,接受升级指令。
- 如果在模块发生复位时 PRTRG 保持悬空,模块将进入正常工作模式。
- 当 PRRSTX 和 PRTRG 与主控系统 IO 连接时,应禁用 IO 的上拉电阻和下拉电阻。模块在正常工作模式时,应保持 PRRSTX 和 PRTRG 在悬空状态。
默认消息
表格 9 默认消息
| 接口 | 默认设置 |
|---|---|
| UART 输出 | 数据格式:1 位起始位、8 位数据位、1 位停止位、无校验位默认波特率为 9600 模块正常上电后,默认激活以下 NMEA 消息:GGA 、GSA、GSV、RMC、ZDA、TXT-ANT,可配置支持其他 NMEA 和华大北斗二进制协议 |
| UART 输入 | 数据格式:1 位起始位、8 位数据位、1 位停止位、无校验位默认波特率为 9600 默认支持协议:华大北斗二进制协议,NMEA |
| Timepulse | 每秒 1 个脉冲,在上升沿同步,脉冲长度 100ms |
为进一步减少功耗而将模块主电关闭时,串口的高电平可能会导致模块无法进入休眠模式。因此,强烈建议在断开模块主电时,同时断开串口连接,或者将串口设置为输入态或高阻态。
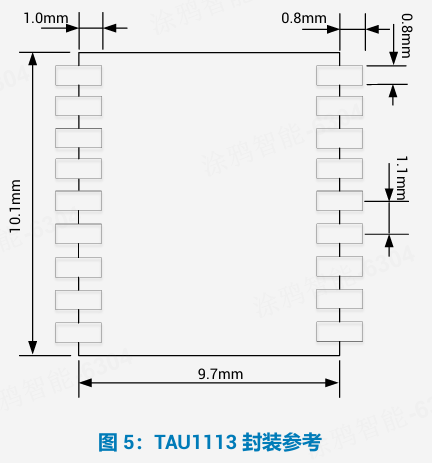
机械规格
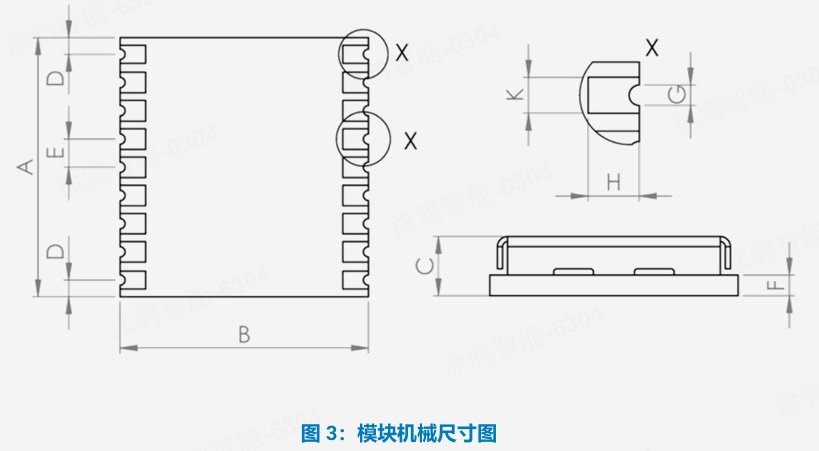
表格 10 尺寸
| 编号 | 最小值(毫米) | 典型值(毫米) | 最大值(毫米) |
|---|---|---|---|
| A | 9.9 | 10.1 | 10.3 |
| B | 9.5 | 9.7 | 9.9 |
| C | 2.3 | 2.5 | 2.7 |
| D | 0.55 | 0.65 | 0.95 |
| E | 1.0 | 1.1 | 1.2 |
| F | 0.6 | 0.8 | - |
| G | 0.4 | 0.5 | 0.6 |
| H | 0.8 | 0.9 | 1.0 |
| K | 0.7 | 0.8 | 0.9 |
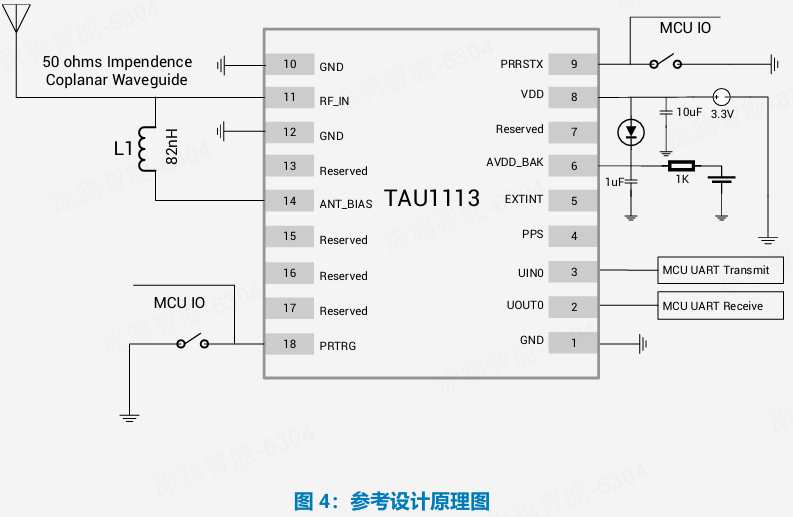
参考设计
原理图参考设计
如下是 TAU1113 模块的基础参考设计,当需要使用有源天线连接时,请保证 82nH 电感处于贴片状态,用于给有源天线供电。当使用无源天线连接时,82nH 电感可以不需要贴片。请保证从 RF_IN 端口到天线接口处的射频线的共面波导阻抗为 50Ω。
AVDD_BAK 不能悬空。在模组内部 AVDD_BAK 和 VDD 之间未设计二极管,用户可在模组外部 AVDD_BAK 和 VDD 之间外接一个二极管,或外接一个电源给 AVDD_BAK 独立供电。
PCB 封装参考
LAYOUT 注意事项
为充分发挥 TAU1113 的优势性能,使用本模块时需注意以下事项:
- 就近模块电源引脚放置去耦电容,并保证电源走线宽度在 0.5mm 以上。
- 建议模块 RF 端口到天线接口处的射频走线宽度大于 0.2mm,并尽可能就近放置;射频部分走线采用共面波导阻抗模型,走线到地铜皮之间控制在 1 倍左右的间距,保证阻抗为 50Ω。
- 建议模块 RF 端口到天线接口处的走线参考第二层地,并保证第二层地平面完整。
- 切勿将模块放置在干扰源附近,如通信天线、晶振、大电感以及高频数字信号线附近,并且模块底部全部以地线填充为佳。
软件接口
NMEA 消息格式
表格 11 NMEA output message
| NMEA | Sub ID | 描述 |
|---|---|---|
| GGA | 0x00 | Global positioning system fixed data |
| GLL | 0x01 | Geographic position - latitude/longitude |
| GRS | 0x02 | GNSS range residuals |
| GSA | 0x03 | GNSS Overall satellite data |
| GSV | 0x04 | GNSS Detailed satellite data |
| RMC | 0x05 | Recommended minimal data for GNSS |
| VTG | 0x06 | Course over ground and ground speed |
| ZDA | 0x07 | Date and time |
| GST | 0x08 | GNSS Pseudorange Error Statistics |
| TXT | 0x20 | Antenna status |
模块默认输出 GGA、GSA、GSV、RMC、ZDA、TXT 消息。
GGA - Global Positioning System Fix Data
GGA Data Format
表格 12 GGA Data Format
| 名称 | 示例 | 单位 | 描述 |
|---|---|---|---|
| Message ID | $GNGGA | - | GGA protocol header |
| UTC Time | 074144.000 | - | hhmmss.sss |
| Latitude | 3957.79941 | - | ddmm.mmmmm |
| N/S indicator | N | - | N = north or S = south |
| Longitude | 11619.02981 | - | dddmm.mmmmm |
| E/W Indicator | E | - | E = east or W = west |
| Position Fix Indicator | 1 | - | See 表格 13 |
| Satellites Used | 19 | - | Number of satellites in use, 00-24 |
| HDOP | 0.83 | - | Horizontal Dilution of Precision (meters) |
| MSL Altitude | 105.5 | meters | Antenna Altitude above/below mean-sea-level (geoid) (in meters) |
| Units | M | meters | Units of antenna altitude, meters |
| Geoidal Separation | -8.4 | meters | |
| Units | M | meters | Units of geoidal separation, meters |
| Age of diff. GNSS data | - | second | Null fields when DGPS is not used |
| Diff. Ref. Station ID | - | - | Differential reference station ID, 0000-1023 |
| Checksum | *65 | - | Checksum |
| <CR> <LF> | - | - | End of message termination |
表格示例输出如下:
$GNGGA,074144.000,3957.79941,N,11619.02981,E,1,19,0.83,105.5,M,-8.4,M,,*65
Position Fix Indicators
表格 13 Position Fix Indicators
| 数值 | 描述 |
|---|---|
| 0 | Fix not available |
| 1 | GNSS fix |
| 2 | Differential GNSS fix |
GLL - Geographic Position - Latitude/Longitude
GLL Data Format
表格 14 GLL Data Format
| 名称 | 示例 | 单位 | 描述 |
|---|---|---|---|
| Message ID | $GNGLL | - | GLL protocol header |
| Latitude | 2503.71465 | - | ddmm.mmmmm |
| N/S indicator | N | - | N = north or S = south |
| Longitude | 12138.73922 | - | dddmm.mmmmm |
| E/W indicator | E | - | E = east or W = west |
| UTC Time | 062052.000 | - | hhmmss.sss |
| Status | A | - | A = data valid or V = data not valid |
| Mode | A | - | A = Autonomous, D = DGPS, N = Data not valid, |
| Checksum | *45 | - | - |
| <CR> <LF> | - | - | End of message termination |
表格示例输出如下:
$GNGLL,2503.71465,N,12138.73922,E,062052.000,A,A*45
GSA - GNSS DOP and Active Satellites
GSA Data Format
表格 15 GSA Data Format
| 名称 | 示例 | 单位 | 描述 |
|---|---|---|---|
| Message ID | $GPGSA | - | GSA protocol header |
| Mode 1 | A | - | See 表格 16 |
| Mode 2 | 3 | - | See 表格 17 |
| ID of satellite used | 01 | - | Sv on Channel 1 |
| ID of satellite used | 11 | - | Sv on Channel 2 |
| …. | - | …. | |
| ID of satellite used | - | - | Sv on Channel 12 |
| PDOP | 1.10 | - | Position Dilution of Precision |
| HDOP | 0.79 | - | Horizontal Dilution of Precision |
| VDOP | 0.77 | - | Vertical Dilution of Precision |
| System ID | 1 | - | Satellites used in GPS 1 = GPS 4 = BD |
| Checksum | *12 | - | - |
| <CR> <LF> | - | - | End of message termination |
表格示例输出如下:
$GPGSA,A,3,01,11,18,30,28,07,17,22,03,,,,1.10,0.79,0.77,1*12 $BDGSA,A,3,10,07,08,12,03,13,01,11,02,04,05,,1.10,0.79,0.77,4*0B
Mode 1
表格 16 Mode 1
| 数值 | 描述 |
|---|---|
| M | Manual - forced to operate in 2D or 3D mode |
| A | Automatic - allowed to automatically switch 2D/3D |
Mode 2
表格 17 Mode 2
| 数值 | 描述 |
|---|---|
| 1 | Fix not available |
| 2 | 2D |
| 3 | 3D |
GSV - GNSS Satellites in View
GSV Data Format
表格 18 GSV Data Format
| 名称 | 示例 | 单位 | 描述 |
|---|---|---|---|
| Message ID | $GPGSV | - | GSV protocol header |
| Total number of messages[1] | 4 | - | Range 1 to 6, Total number of GSV messages to be transmitted in this group |
| Message number[1] | 1 | - | Range 1 to 6 Origin number of this GSV message within current group |
| Satellites in view | 15 | - | Total number of satellites in view |
| Satellite ID[2] | 193 | - | Satellite PRN number |
| Elevation | 69 | degrees | Elevation in degrees (Range 00 to 90) |
| Azimuth | 35 | degrees | Azimuth in degrees to true north (Range 000 to 359) |
| SNR (C/No) | 39 | dB-Hz | SNR in dB (Range 00 to 99, null when not tracking) |
| …. | - | - | …. |
| Satellite ID | 129 | Satellite PRN number (Range 01 to 196) | |
| Elevation | 50 | degrees | Elevation in degrees (Range 00 to 90) |
| Azimuth | 134 | degrees | Azimuth in degrees to true north (Range 000 to 359) |
| SNR (C/No) | 34 | dB-Hz | SNR in dB Channel 4 (Range 00 to 99, null when not tracking) |
| Checksum | *73 | - | - |
| <CR> <LF> | - | - | End of message termination |
- [1] Depending on the number of satellites tracked multiple messages of GSV data may be required.
- [2] GPS ID: 01~32, QZSS ID: 193~199, BEIDOU ID: 01~32
表格示例输出如下:
$GPGSV,4,1,15,193,69,35,39,6,50,28,41,137,50,134,34,129,50,134,34*73 $GPGSV,4,2,15,17,45,137,41,2,42,326,40,5,42,250,40,128,38,243,36*4B $GPGSV,4,3,15,9,36,65,42,12,26,285,35,127,12,260,32,19,9,137,35*7D $GPGSV,4,4,15,23,8,41,35,25,4,316,36,28,,,*4F $BDGSV,3,1,09,8,75,64,39,6,73,237,38,3,58,205,38,1,53,143,38*56 $BDGSV,3,2,09,9,47,224,38,4,38,118,37,2,35,246,33,5,16,259,31*6C $BDGSV,3,3,09,10,2,210,21*62
RMC - Recommended Minimum Specific GNSS Data
RMC Data Format
表格 19 RMC Data Format
| 名称 | 示例 | 单位 | 描述 |
|---|---|---|---|
| Message ID | $GNRMC | - | RMC protocol header |
| UTC Time | 075939.000 | - | hhmmss.sss |
| Status | A | - | A = data valid or V = data not valid |
| Latitude | 2225.56166 | - | ddmm.mmmmm |
| N/S Indicator | N | - | N = north or S = south |
| Longitude | 11412.68199 | - | dddmm.mmmmm |
| E/W Indicator | E | - | E = east or W = west |
| Speed over ground | 0.000 | knots | Speed over ground |
| Course over ground | 64.79 | degrees | Degrees to true north |
| Date | 020589 | - | ddmmyy |
| Magnetic variation | 0.0 | degrees | (Not shown) |
| Variation sense | E | - | E = east or W = west (Not shown) |
| Mode | A | - | A = Autonomous, D = DGPS, N = Data not valid, |
| Checksum | *4B | - | - |
| <CR> <LF> | - | - | End of message termination |
表格示例输出如下:
$GNRMC,075939.000,A,2225.56166,N,11412.68199,E,0.000,64.79,020589,0.0,E,A*1D $GNRMC,074458.000,A,3957.79932,N,11619.03010,E,0.005,0.00,280419,A*4B
VTG - Course over Ground and Ground Speed
VTG Data Format
表格 20 VTG Data Format
| 名称 | 示例 | 单位 | 描述 |
|---|---|---|---|
| Message ID | $GNVTG | VTG protocol header | |
| Course over ground | 0 | degrees | Degrees to true north |
| Reference | T | True north | |
| Course over ground | degrees | Degrees to Magnetic | |
| Reference | M | Magnetic | |
| Speed over ground | 0 | knots | Measured speed |
| Units | N | Knots | |
| Speed over ground | 0 | km/hr | Measured speed |
| Units | K | Kilometer per hour | |
| Mode | A | A = Autonomous, D = DGPS, N = Data not valid, | |
| Checksum | *3D | ||
| <CR> <LF> | End of message termination |
表格示例输出如下:
$GNVTG,0.00,T,0.00,M,0.000,N,0.000,K,A*3D $GNVTG,0.00,T,,M,0.011,N,0.021,K,A*20
ZDA - Time & Date
表格 21 ZDA Data Format
| 名称 | 示例 | 单位 | 描述 |
|---|---|---|---|
| Message ID | $GNZDA | - | ZDA protocol header |
| UTC Time | 033900.000 | - | hhmmss.sss |
| Day | 28 | - | dd (01 to 31) |
| Month | 10 | - | mm (01 to 12) |
| Year | 2015 | - | yyyy (1980 to 2025) |
| Local zone hours | - | hour | - |
| Local zone minutes | - | minute | - |
| Checksum | *4C | - | - |
| <CR> <LF> | - | - | End of message termination |
表格 21 的示例输出如下:
$GNZDA,033900.000,28,10,2015,*4C
GST - GNSS Pseudorange Error Statistics
GST Data Format
表格 22 GST Data Format
| 名称 | 示例 | 单位 | 描述 |
|---|---|---|---|
| Message ID | $GNGST | - | GST protocol header |
| UTC Time | 081119.000 | - | hhmmss.sss |
| RMS value | 1.2 | - | RMS value of the standard deviation of the range inputs to the navigation process. Range inputs include pseudoranges & DGNSS corrections |
| Standard semi-major axis of error | - | Meter | Standard deviation of semi-major axis of error ellipse |
| Standard semi-minor axis of error | - | Meter | Standard deviation of semi-minor axis of error ellipse |
| Orientation of semi-major axis of error | - | Degree | Orientation of semi-major axis of error ellipse (degrees from true north) |
| latitude error | 0.6 | Meter | Standard deviation of latitude error |
| longitude error | 0.5 | Meter | Standard deviation of longitude error |
| altitude error | 0.5 | Meter | Standard deviation of altitude error |
| Checksum | *52 | - | - |
| <CR> <LF> | - | - | End of message termination |
表格示例输出如下:
$GNGST,081119.000,1.2,,,,0.6,0.5,0.5*52
TXT - ANT & USR message
TXT Data Format
表格 23 TXT Data Format
| 名称 | 示例 | 单位 | 描述 |
|---|---|---|---|
| Message ID | $GNTXT | - | USR message protocol header |
| Total number | 01 | - | Total number of sentences |
| Sentence Number | 01 | - | Sentence number |
| Identifier | 01 | - | Text identifier |
| Content | ANT_OK | - | Text message |
| Checksum | *50 | 4C | - |
表格示例输出如下:
$GNTXT,01,01,01,ANT_OK*50
天线状态 NMEA 输出
表格 24 天线状态 NMEA 输出
| 有源天线状态 | GNSS 模块输出消息 |
|---|---|
| 短路 | $GNTXT,01,01,01,ANT_SHORT*06 |
| 正常工作 | $GNTXT,01,01,01,ANT_OK*50 |
| 开路 | $GNTXT,01,01,01,ANT_OPEN*40 |
专属二进制消息
常用专属命令如下表所示:
TAU1113 专有命令集
表格 25 TAU1113 专有命令集
| 命令描述 | 软件命令[2] |
|---|---|
| Perform a Cold start | F1 D9 06 40 01 00 01 48 22 |
| Perform a Warm start | F1 D9 06 40 01 00 02 49 23 |
| Perform a Hot start | F1 D9 06 40 01 00 03 4A 24 |
| Perform a Factory reset | F1 D9 06 09 08 00 02 00 00 00 FF FF FF FF 15 01 |
| UART configures as 115200bps | F1 D9 06 00 08 00 00 00 00 00 00 C2 01 00 D1 E0 |
| UART configures as 9600bps | F1 D9 06 00 08 00 00 00 00 00 80 25 00 00 B3 07 |
| Enable ZDA message | F1 D9 06 01 03 00 F0 07 01 02 1E |
| Disable ZDA message | F1 D9 06 01 03 00 F0 07 00 01 1D |
| Navigate with GPS only | F1 D9 06 0C 04 00 01 00 00 00 17 A0 |
| Navigate with BEIDOU system only | F1 D9 06 0C 04 00 04 00 00 00 1A AC |
| Navigate with GPS+BEIDOU system | F1 D9 06 0C 04 00 05 00 00 00 1B B0 |
| Query firmware version[1] | F1 D9 0A 04 00 00 0E 34 |
- [1] Firmware version will show as Hex mode too.
- [2] Add 0D 0A at the end of command.
模式配置
CFG - SIMPLERST
-
Configure soft reset (as system command, there is NO ACK);
F1 D9 06 40 01 00 00 47 21 -
Configure a cold start (as system command, there is NO ACK);
F1 D9 06 40 01 00 01 48 22 -
Configure a warm start (as system command, there is NO ACK);
F1 D9 06 40 01 00 02 49 23 -
Configure a hot start (as system command, there is NO ACK);
F1 D9 06 40 01 00 03 4A 24 -
Configure GNSS stop (if successful, it would return ACK, else return NAK);
F1 D9 06 40 01 00 10 57 31 -
Configure GNSS start (if successful, it would return ACK, else return NAK);
F1 D9 06 40 01 00 11 58 32 -
Configure Clear All TRK Channels (if successful, it would return ACK, else return NAK);
F1 D9 06 40 01 00 80 C7 A1 -
CFG-SLEEP:
Set GNSS task to deep sleep for 5000ms;
F1 D9 06 41 05 00 88 13 00 00 01 E8 56 -
CFG-PWRCTL:
- Poll message of power control;
F1 D9 06 42 00 00 13 3F - Set receiver into cyclic sleep mode;
F1 D9 06 42 14 00 00 05 00 00 B8 0B 00 00 60 EA 00 00 D0 07 00 00 00 00 00 00 45 F9
- Poll message of power control;
包装与处理
包装
包装须知
TAU1113 GNSS 定位模块是湿度、静电均敏感设备。在产品的包装和运输过程中,请务必遵循相关处理要求,并采取相应的预防措施以减少产品损坏。
下表为产品运输的标准包装结构:
表格 26 包装结构

本包装信息不适用于非标准数量的订单。非标准数量的订单包装信息此处不作赘述,请以实际收发为参考。
模块包装
TAU1113 GNSS 定位模块采用卷轴(由卷带和卷盘组成)的方式,并使用具有防静电效果的密封袋进行包装,以满足客户高效生产、批量安装和拆卸的需求。下图为卷带的尺寸细节图:
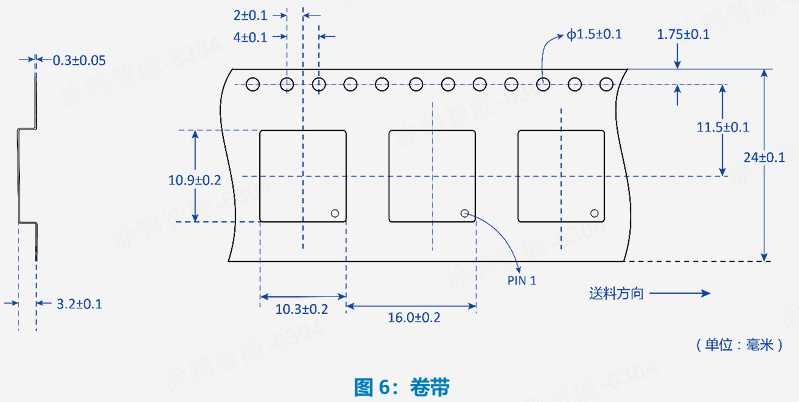
每卷轴可承装 1000 片模块,下图为卷盘的尺寸细节图:
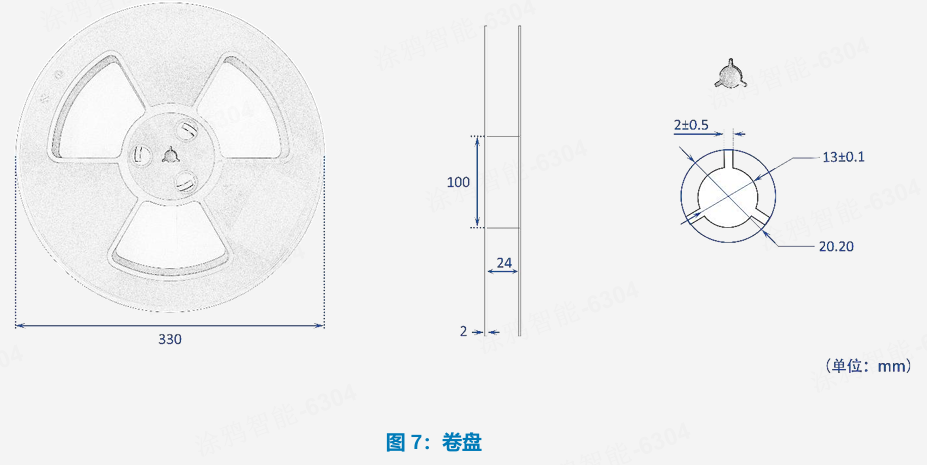
运输包装
由于产品的湿度敏感和静电敏感特性,需使用防静电的密封袋对卷轴进行密封包装,并以纸箱进行运输。运输包装规格如下表格:
表格 27 包装规格汇总
| 类型 | 规格 |
|---|---|
| 卷轴 | 1000 片/卷 |
| 密封袋 | 1 卷/袋 |
| 运输纸箱 | 5 袋/箱 |
存储
为防止产品受潮和静电放电,产品密封包装袋内附有干燥剂和湿度指示卡,用户可通过湿度指示卡了解产品所处环境的湿度状况。
ESD处理
ESD 注意事项
GNSS 定位模块包含高度敏感的电子线路,属于静电敏感器件(ESD)。请注意下面的操作事项,若未按照下述预防措施操作,可能会对模块造成严重损坏。
- 天线贴片前,请先接地。
- 在引出 RF 引脚时,请不要接触任何带电电容和其他器件(例如,天线贴片~10 pF;同轴电缆~50 – 80 pF/m;焊接烙铁)。
- 为防止静电放电,请勿将天线区域暴露在外;若因设计原因暴露在外,请采取适当的 ESD 防护措施。
- 在焊接 RF 连接器和天线贴片时,请确保使用 ESD 安全烙铁。

ESD 防护措施
GNSS 定位模块为静电敏感器件。在操作使用接收机时,必须特别小心,以减少静电的危险。除了标准的 ESD 安全措施外,还需考虑如下措施:
- 在射频输入部分加入 ESD 二极管,防止静电放电。
- 切勿触摸任何暴露的天线区域。
- 将 ESD 二极管添加到 UART 接口。
湿敏等级
GNSS 定位模块的湿敏等级为 MSL3。
该内容对您有帮助吗?
是意见反馈该内容对您有帮助吗?
是意见反馈





