激光扫地机
更新时间:2021-12-08 01:42:38LLM 副本以 Markdown 格式查看下载 PDF
本文为您介绍 [激光扫地机模板] 的具体功能及其使用方法,更多资源参考 GitHub 仓库。
此项目依赖 TYSdk.mobile.mobileInfo.appRnVersion 5.28 以上,如果 App 版本过低,请前往 涂鸦面板-RN 重新下载。
简介
该模板工程为基于 React Native 0.59 的激光扫地机模板,支持以下功能:
- 开启和关闭扫地机
- 控制扫地机充电
- 改变扫地机工作状态,例如定点清扫,选区清扫,区域清扫
- 设置禁区和虚拟墙
- 设置清扫区域
- 设置和改变房间名称
- 设置和改变房间属性
- 分割房间
- 重置房间
- 查看清扫记录
- 定时
界面示例
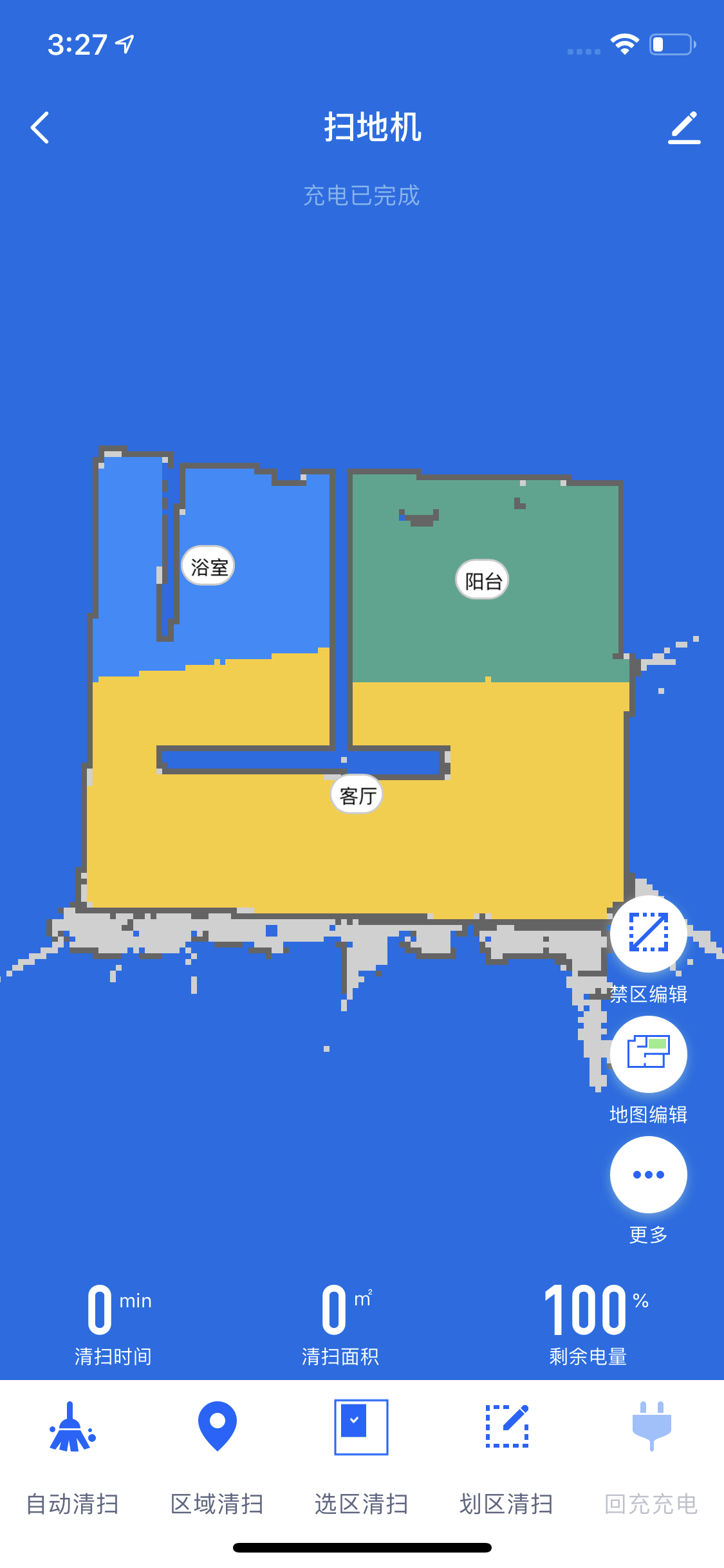
主页
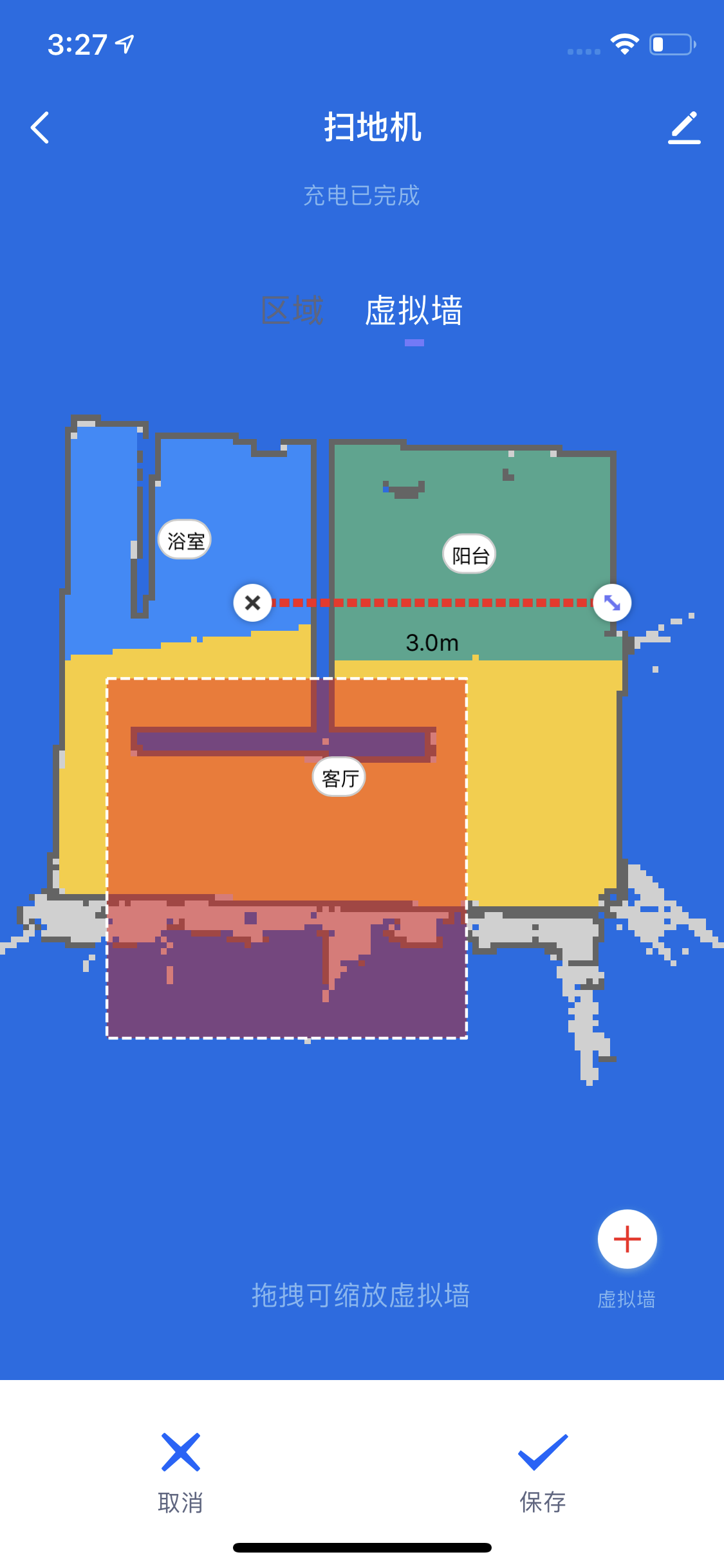
添加禁区
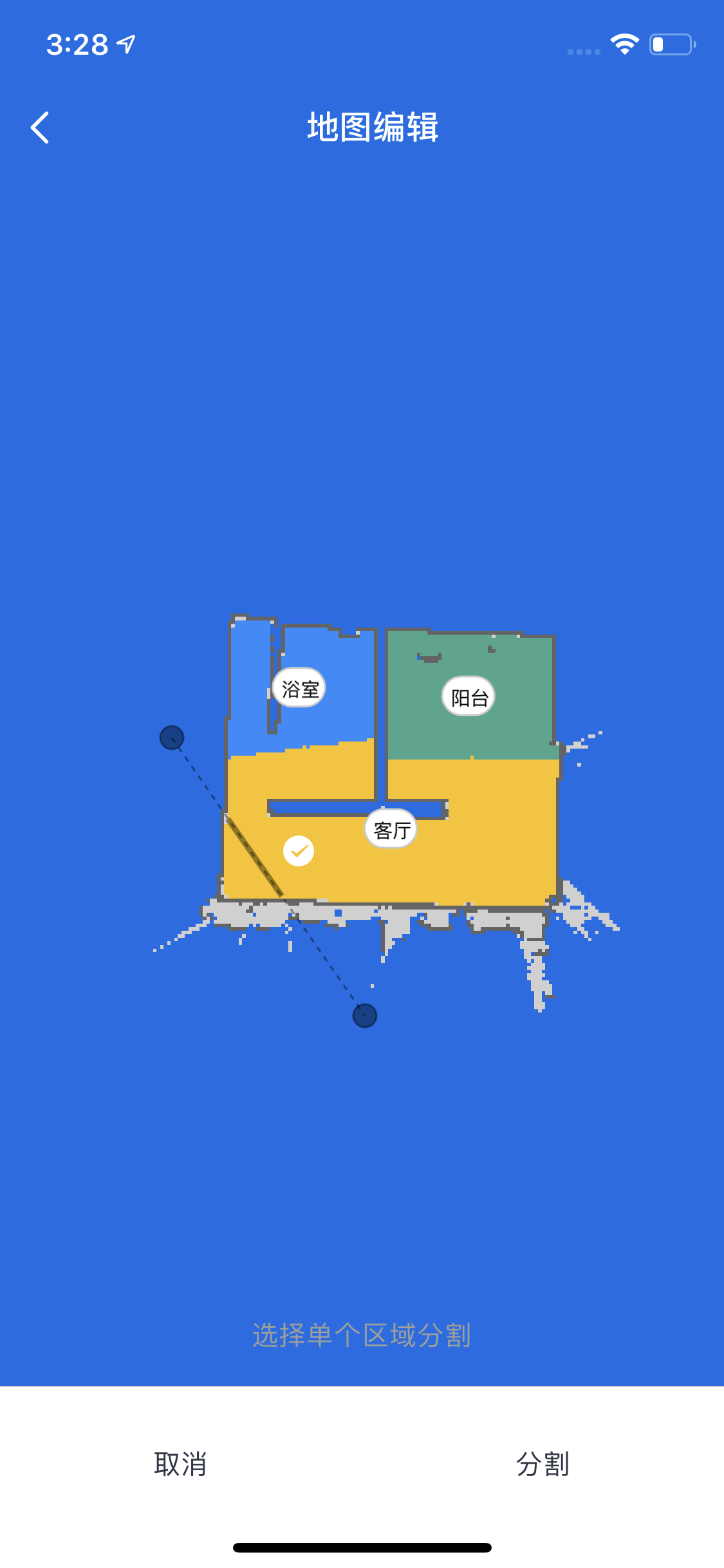
分割房间
修改房间名称

设置

目录
此处仅描述该脚手架相关的目录,如需了解通用目录结构信息参考 RN 0.59 脚手架文档。
├── src
│ ├── api // 放置项目中用到的一系列云端 API
│ ├── components // 放置项目中用到的复用的功能组件
│ ├── composeLayout.tsx // 封装处理了面板内部所需要的一些`设备事件`和`设备信息`
│ ├── config // 放置面板内部一些常用的配置文件
│ ├── pages // 放置项目的各个页面级别的组件
│ ├── protocol // 放置数据解析协议(地图,路径,虚拟信息等)
│ ├── i18n // 放置多语言配置文件
│ ├── main.tsx // 项目入口文件, 继承自 `NavigatorLayout`,通过重写 `hookRoute` 方法将一些必要的配置传入,例如背景、topbar 等;重写 `renderScene` 方法控制路由跳转
│ ├── store // 放置 redux 相关的一些代码
│ ├── res // 放置本地资源,包括图片,svg path 等
│ └── utils // 放置面板内部会用到的一些常用工具方法等
业务流程及 UI 交互说明
-
进入面板下发’request’: 'get_both’获取地图数据,路径数据,虚拟信息数据,并解析展示在面板首页。
-
点击自动轻松按钮可操作扫地机开始/暂停清扫。
-
点击回充充电按钮可操作扫地机开始/暂停充电。
-
点击区域清扫按钮,并在地图上选择一个清扫点,点击确认可操作扫地机区域清扫。
-
点击选区清扫按钮,并选择地图上的分区,点击确认可操作扫地机选区清扫。
-
点击划区清扫按钮,并在地图上添加一个区域,点击确认可操作扫地机划区清扫。
-
点击禁区编辑,可在地图上添加禁区和虚拟墙。
-
点击地图编辑,可进入地图编辑页面。
在地图编辑页面,可进行如下操作:- 区域合并
- 区域分割
- 恢复分区
- 区域命名
- 定制模式
- 清扫顺序
-
点击更多,可进入设置页面。
在设置页面,可进行如下操作:- 遥控模式
- 地图管理
- 预约
- 语音及音量
- 勿扰模式
DP 协议介绍
此处只描述扫地机必需 DP,如需了解可选 DP 请查看对应产品详情。
清扫开关(必选)
| 参数 | 取值 |
|---|---|
| id | 1 |
| code | switch_go |
| type | 布尔型 |
| mode | 可下发可上报 |
| value | true 或 false |
| description |
|
暂停/继续(必选)
| 参数 | 取值 |
|---|---|
| id | 2 |
| code | pause |
| type | 布尔型 |
| mode | 可下发可上报 |
| value | true 或 false |
| description |
|
回充开关(必选)
| 参数 | 取值 |
|---|---|
| id | 3 |
| code | switch_charge |
| type | 布尔型 |
| mode | 可下发可上报 |
| value | true 或 false |
| description |
|
工作模式(必选)
| 参数 | 取值 |
|---|---|
| id | 4 |
| code | mode |
| type | 枚举型 |
| mode | 可下发可上报 |
| value | 枚举值:smart, chargego, zone, pose, part, select_room |
| description | 默认值(不可修改删除,否则影响控制面板逻辑):
|
当前状态(必选)
| 参数 | 取值 |
|---|---|
| id | 5 |
| code | status |
| type | 枚举型 |
| mode | 只上报 |
| value | 枚举值:standby, smart, zone_clean, part_clean, cleaning, paused, goto_pos, pos_arrived, pos_unarrive, goto_charge, charging, charge_done, sleep, select_room |
| description | 默认值(不可修改删除,否则影响控制面板逻辑):
说明: 可增加其他状态值,状态值尽量是状态的英文小写单词。如果需要设置故障中状态,则取值为 in_trouble。 |
路径传输(必选)
| 参数 | 取值 |
|---|---|
| id | 14 |
| code | path_data |
| type | RAW 型 |
| mode | 可下发可上报 |
| description | 相关数据协议及逻辑可参看开发包中激光扫地机地图协议文件 |
指令传输(必选)
| 参数 | 取值 |
|---|---|
| id | 15 |
| code | command_trans |
| type | RAW 型 |
| mode | 可下发可上报 |
| description | 相关数据协议及逻辑可参看开发包中激光扫地机地图协议文件 |
请求数据(必选)
| 参数 | 取值 |
|---|---|
| id | 16 |
| code | request |
| type | 枚举型 |
| mode | 可下发可上报 |
| value | 枚举值:get_map, get_path, get_both |
| description | 相关数据协议及逻辑可参看开发包中激光扫地机地图协议文件 |
故障上报(必选)
| 参数 | 取值 |
|---|---|
| id | 28 |
| code | fault |
| mode | 可下发可上报 |
| value | 故障值:edge_sweep, middle_sweep, left_wheel, right_wheel, garbage_box, land_check, collision |
| description | 默认值(不可修改删除,否则影响控制面板逻辑):
说明: 可增加其他状态值,状态值尽量是状态的英文小写单词。如果需要设置故障中状态,则取值为 in_trouble。 |
该内容对您有帮助吗?
是意见反馈该内容对您有帮助吗?
是意见反馈
关注“涂鸦智能”
涂鸦服务尽在掌握

关注“全球智能商业”
第一时间获取物联网资讯




