PWM
Overview
Pulse width modulation (PWM) is an efficient technique for controlling analog circuits using digital outputs from microprocessors.
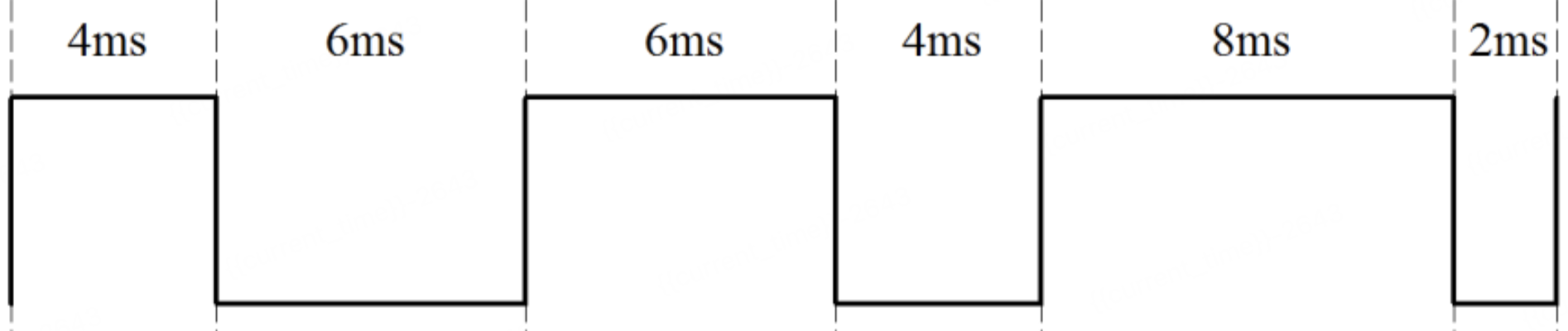
The figure above shows a PWM waveform with a 100 Hz periodic frequency, featuring a 40% high-level duty cycle and 60% low-level duty cycle. By adjusting the high-level duty cycle value, the analog output level can be modified.
API description
tkl_pwm_init
OPERATE_RET tkl_pwm_init(TUYA_PWM_NUM_E ch_id, CONST TUYA_PWM_BASE_CFG_T *cfg);
-
Features:
- Initialize the specified PWM instance using the port number and basic configuration, and return the initialization result.
-
Parameters:
-
ch_id: The channel ID. -
cfg: The basic PWM configuration, including output polarity, duty cycle, and frequency.typedef struct { TUYA_PWM_POLARITY_E polarity; TUYA_PWM_COUNT_E count_mode; //pulse duty cycle = duty / cycle; exp duty = 5000,cycle = 10000; pulse duty cycle = 50% UINT_T duty; UINT_T cycle; UINT_T frequency; // (bet: Hz) } TUYA_PWM_BASE_CFG_T; -
polarity:Name Definition TUYA_PWM_NEGATIVE The PWM low active output. TUYA_PWM_POSITIVE The PWM high active output. -
count_mode: The counting mode, includingTUYA_PWM_CNT_UPandTUYA_PWM_CNT_UP_AND_DOWN. -
duty: The duty cycle, used withcycle. Output =duty÷cycle. -
cycle: The cycle or granularity. Output =duty÷cycle. -
frequency: The output frequency, in Hz.
-
-
Return value:
OPRT_OK: Success.- For more information, see
tuya_error_code.h.
tkl_pwm_deinit
OPERATE_RET tkl_pwm_deinit(TUYA_PWM_NUM_E ch_id);
- Features:
- Deinitialize the PWM.
- This interface stops the ongoing transmission (if any) and releases the related software and hardware resources.
- Parameters:
ch_id: The channel ID.
- Return value:
OPRT_OK: Success.- For more information, see
tuya_error_code.h.
tkl_pwm_start
OPERATE_RET tkl_pwm_start(TUYA_PWM_NUM_E ch_id);
- Features:
- Start the PWM.
- Parameters:
ch_id: The channel ID.
- Return value:
OPRT_OK: Success.- For more information, see
tuya_error_code.h.
tkl_pwm_stop
OPERATE_RET tkl_pwm_stop(TUYA_PWM_NUM_E ch_id);
- Features:
- Stop the PWM.
- Parameters:
port: The port number.
- Return value:
OPRT_OK: Success.- For more information, see
tuya_error_code.h.
tkl_pwm_multichannel_start
OPERATE_RET tkl_pwm_multichannel_start(TUYA_PWM_NUM_E *ch_id, UINT8_T num);
- Features:
- Start multi-channel PWM simultaneously. This interface is used for multi-channel combined output in scenarios with strict timing requirements.
- Parameters:
ch_id: The list of channel IDs in the form of an array.num: The number of channels to be started.
- Return value:
OPRT_OK: Success.- For more information, see
tuya_error_code.h.
tkl_pwm_multichannel_stop
OPERATE_RET tkl_pwm_multichannel_stop(TUYA_PWM_NUM_E *ch_id, UINT8_T num);
-
Features:
- Stop multi-channel PWM simultaneously. This interface is used for multi-channel combined output in scenarios with strict timing requirements.
-
Parameters:
ch_id: The list of channel IDs in the form of an array.num: The number of channels to be stopped.
-
Return value:
OPRT_OK: Success.- For more information, see
tuya_error_code.h.
tkl_pwm_info_set
OPERATE_RET tkl_pwm_info_set(TUYA_PWM_NUM_E ch_id, CONST TUYA_PWM_BASE_CFG_T *info);
- Features:
- Set PWM configuration parameters. After PWM is started, the configuration can be modified dynamically, and then the PWM shall be started again.
- Parameters:
ch_id: The channel ID.info: The basic PWM configuration, including output polarity, duty cycle, and frequency. The struct parameters are as described above.
- Return value:
- An error message is returned on failure.
OPRT_OK: Success. - For more information, see
tuya_error_code.h.
- An error message is returned on failure.
tkl_pwm_info_get
OPERATE_RET tkl_pwm_info_get(TUYA_PWM_NUM_E ch_id, TUYA_PWM_BASE_CFG_T *info);
- Features:
- Get the PWM configuration information.
- Parameters:
ch_id: The channel ID.info: The basic PWM configuration, including output polarity, duty cycle, and frequency. The struct parameters are as described above.
- Return value:
- An error message is returned on failure.
OPRT_OK: Success. - For more information, see
tuya_error_code.h.
- An error message is returned on failure.
tkl_pwm_cap_start
OPERATE_RET tkl_pwm_cap_start(TUYA_PWM_NUM_E ch_id, CONST TUYA_PWM_CAP_IRQ_T *cfg);
-
Features:
- Enable the PWM input capture mode.
-
Parameters:
-
ch_id: The channel ID. -
cfg: The PWM input capture configuration, as detailed below.-
cap_mode:Name Definition TUYA_PWM_CAPTURE_MODE_ONCE Single trigger mode TUYA_PWM_CAPTURE_MODE_PERIOD Multiple trigger mode -
trigger_level:Name Definition TUYA_PWM_NEGATIVE The trigger signal is falling edge. TUYA_PWM_POSITIVE The trigger signal is rising edge. -
clk: The sampling clock of the captured signal. -
cb: The callback function of the captured signal.typedef VOID_T (*TUYA_PWM_IRQ_CB)(TUYA_PWM_NUM_E port, TUYA_PWM_CAPTURE_DATA_T data, VOID_T *arg);typedef struct { UINT_T cap_value; /* Captured data */ TUYA_PWM_POLARITY_E cap_edge; /* Capture edge, TUYA_PWM_NEGATIVE:falling edge, TUYA_PWM_POSITIVE:rising edge */ } TUYA_PWM_CAPTURE_DATA_T;
-
-
arg: The parameter of the callback function.
-
-
Return value:
- An error message is returned on failure.
OPRT_OK: Success. - For more information, see
tuya_error_code.h.
- An error message is returned on failure.
tkl_pwm_cap_stop
OPERATE_RET tkl_pwm_cap_stop(TUYA_PWM_NUM_E ch_id);
-
Features:
- Disable the PWM input capture mode.
-
Parameters:
ch_id: The channel ID.
-
Return value:
- An error message is returned on failure.
OPRT_OK: Success. - For more information, see
tuya_error_code.h.
- An error message is returned on failure.
Example
void tuya_pwm_test(void)
{
OPERATE_RET ret;
TUYA_PWM_BASE_CFG_T cfg = {.polarity = TUYA_PWM_POSITIVE,\
.duty = 1000,
.cycle = 10000,
.frequency = 1000};
ret = tkl_pwm_init(TUYA_PWM_NUM_0, &cfg);
if (ret != OPRT_OK) {
//Fail
return;
}
ret = tkl_pwm_start(TUYA_PWM_NUM_0);
if (ret != OPRT_OK) {
//Fail
return;
}
tkl_system_delay(5000);
ret = tkl_pwm_info_get(TUYA_PWM_NUM_0, &cfg);
if (ret != OPRT_OK) {
//Fail
return;
}
if(cfg.duty !=5000){
cfg.duty =5000;
}
ret = tkl_pwm_info_set(TUYA_PWM_NUM_0, &cfg);
//Delay
tkl_system_delay(5000);
ret = tkl_pwm_stop(TUYA_PWM_NUM_0);
if (ret != OPRT_OK) {
//Fail
return;
}
ret = tkl_pwm_deinit(TKL_PWM1_CH);
if (ret != OPRT_OK) {
//Fail
return;
}
}
Is this page helpful?
YesFeedbackIs this page helpful?
YesFeedback




