RVC Real-time Transmission v2.0
Based on tuyaos_robot_rvc_sdk, this topic describes the process and APIs for transmitting real-time maps and routes of laser robot vacuums, as well as the coordinate system of maps.
Overview
Laser robot vacuums support three types of files:
- Full map file
- Cleaning route file
- AI-based object recognition file
Thumbnail data and original high-definition (HD) images are AI-based object recognition capabilities. In order to use these capabilities, the robot vacuum needs to be equipped with a camera. You can choose whether to configure these capabilities according to your hardware conditions.
How it works
Transmit real-time files
- The above APIs are all reported in blocking mode. The application shall asynchronously call various APIs in independent threads, such as real-time maps, routes, thumbnails, and original HD image transmission.
- To report real-time maps, routes, and thumbnails, you only need to focus on registering the status callback
ty_rvc_event_cbin TuyaOS SDK, which has only two states: start and end. - To report original HD images, you need to use the file name
aiHD_XXXX_YYYY.binsent by the mobile app and transfer it to the application by using the TuyaOS SDK.XXXX_YYYYis the real object coordinate point. The application gets the correct original HD image data based on the real coordinate point, and calls the API for sending the original HD image data. Thus, report it to the mobile app.
Data type
OBJECT_POINT_S
/**
* @brief Structure for coordinate points
*/
typedef struct {
int x; // X value of the coordinate point
int y; // Y value of the coordinate point
} OBJECT_POINT_S;
AI_OBJECTS_TYPE_E
/**
* @brief Names of recognized objects
*/
typedef enum {
OBJECTS_TYPE_WIRE = 0, // Wire
OBJECTS_TYPE_SHOES, // Shoes
OBJECTS_TYPE_SOCKS, // Socks
OBJECTS_TYPE_TOYS, // Toys
OBJECTS_TYPE_CHAIR, // Chair
OBJECTS_TYPE_TABLE, // Table
OBJECTS_TYPE_TRASH_CAN, // Trash can
OBJECTS_TYPE_POTTED_PLANT, // Potted plant
OBJECTS_TYPE_OTHER, // Other
OBJECTS_TYPE_MAX,
} AI_OBJECTS_TYPE_E;
TuyaOS SDK only defines several standard object types. If you have new object types, you can add them after OBJECTS_TYPE_OTHER and align them with the object type definitions on the panel.
OBJECT_THUMBNAILS_PARAM_S
/**
* @brief thumbnail param structure
*/
typedef struct {
OBJECT_POINT_S points; // Points of objects
AI_OBJECTS_TYPE_E object_type; // Recognized objects
unsigned char accuracy; // Recognition accuracy, report FF if not used
} OBJECT_THUMBNAILS_PARAM_S;
RVC_AI_OBJECT_THUMBNAILS_INFO_S
/**
* @brief AI thumbnail data structure
*/
typedef struct {
int map_id; // Map ID
int object_num; // Number of objects
OBJECT_THUMBNAILS_PARAM_S* param; // Points of objects, type, and accuracy
} RVC_AI_OBJECT_THUMBNAILS_INFO_S;
The RVC_AI_OBJECT_THUMBNAILS_INFO_S struct stores the coordinates, type, and accuracy of all objects on a map. The OBJECT_THUMBNAILS_PARAM_S struct stores the coordinates, type, and accuracy of an object.
RVC_MAP_HEAD_INFO_S
/**
* @brief Parameters for the map protocol header of the vacuum cleaner
*/
typedef struct {
unsigned short map_id; // Map ID
int status; // Map status, 0 indicates unstable, 1 indicates stable
int height; // Height of the map in pixels
int width; // Width of the map in pixels
int resolution; // Map resolution (width/length of each grid), reported as original value, unit: meters
POINT_COOR_S origin; // Machine origin X/Y coordinates, given relative to the screen coordinate system, reported as original value
POINT_COOR_S charge_point; // Charging station X/Y coordinates, given relative to the screen coordinate system, reported as original value
int charge_angle; // Orientation of the charging station
} RVC_MAP_HEAD_INFO_S;
RVC_MAP_HEAD_INFO_S is a member of the map data RVC_MAP_DATA_S struct. It indicates the header parameters of the map data.
PATH_POINT_S
typedef struct {
int type; //Path point type
POINT_COOR_S coordinates; //Path coordinate array, given with reference to the machine coordinate system
} PATH_POINT_S;
RVC_PATH_INFO_S
/**
* @brief Parameters for the path protocol of the robot vacuum cleaner
*/
typedef struct {
unsigned short path_id; // Path ID: Roadmap identification for a complete sweep
int type; //0x01 full path (normal mode), 0x02 full path (complex mode), 0x03 navigation path
int count; // Total number of waypoints (full)
int direction; // Device heading angle
PATH_POINT_S*path_point; //Path coordinate array, given with reference to the machine coordinate system, the original value is reported
} RVC_PATH_INFO_S;
The RVC_PATH_INFO_S struct is the map route data. For more information about the PATH_POINT_S member, see Map and route data structure.
RVC_PIXEL_TYPE_E
/**
* @brief Pixel Point Types
*/
typedef enum {
RVC_PIXEL_UNKNOW=0, // Unknown area, the background area of the map rectangular canvas.
RVC_PIXEL_OBS, // Obstacle
RVC_PIXEL_BLANK, //Free area, laser scanning points of unpartitioned rooms.
RVC_PIXEL_MAX, // Pad data, no use
} RVC_PIXEL_TYPE_E;
RVC_PIXEL_TYPE_E is an enumeration value of the pixel point in the map. When the map is unstable (unpartitioned), all laser-scanned points that are not obstacles must be reported using the RVC_PIXEL_BLANK type. When the map is stable (partitioned), non-obstacle points in an unpartitioned room scanned by the laser should also be reported using the RVC_PIXEL_BLANK type. Non-obstacle points in a partitioned room should be reported using the RVC_PIXEL_UNKNOW type.
RVC_POINT_S
/**
* @brief Point in the corresponding coordinate system
*/
typedef struct {
float x; // X-axis coordinate in the corresponding coordinate system, unit: meters
float y; // Y-axis coordinate in the corresponding coordinate system, unit: meters
float z; // Z-axis coordinate in the corresponding coordinate system, unit: meters
}RVC_POINT_S;
ROOM_POLYGON_S
/**
* @brief Polygon parameters
*/
typedef struct {
RVC_POINT_S* points; // Polygon points
int points_size; // Number of points
}ROOM_POLYGON_S;
RVC_ROOM_POLYGON_S
/**
* @brief Area polygon parameters
*/
typedef struct {
int id; /* Area ID */
ROOM_POLYGON_S polygon; // Polygon
} RVC_ROOM_POLYGON_S;
The RVC_ROOM_POLYGON_S struct is used to store the grid coordinate points of multiple room boundaries. You need to apply for the memory space of the struct. Note the polygon member in this struct is a pointer, and a value needs to be assigned to the pointer object.
RVC_MAP_DATA_S
/**
* @brief Map data structure
*/
typedef struct{
RVC_MAP_HEAD_INFO_S header; //Parameters for the map protocol header of the robot vacuum cleaner
unsigned char** map_buff; //Pixel data on the map
int room_polygons_count; //Number of room zones
RVC_ROOM_POLYGON_S* room_polygons_data; //Area polygon parameters
}RVC_MAP_DATA_S;
The RVC_MAP_DATA_S struct is used to store the data of a map. The struct members include the fixed data at the beginning of the map, pixel data, the number of room partitions, and boundary grid coordinate point data.
APIs
Initialize streaming media service
Initialize the streaming media service. Real-time maps and routes can be transmitted as expected only if you call this interface.
/**
* @brief Real-time map and route transmission callback
*/
typedef INT_T (*RVC_TRANS_EVENT_CB)(IN CONST int onoff);
/***********************************************************
*@Function: tuya_sdk_media_server_init
*@brief Initialize media server
*@param[in] handler The status callback for real-time data transmission,
with statuses including: start and end.
*@return OPRT_OK on success. Others on error, please refer to tuya_error_code.h
***********************************************************/
OPERATE_RET ty_rvc_server_init(RVC_TRANS_EVENT_CB handler);
Parameters
| Parameter | Description |
|---|---|
| handler | The transmission status of real-time maps and routes. You can determine whether data reporting is started based on the status value. |
Report real-time map data
Send structured data of real-time maps to the mobile app for display. For more information, see Device angle.
/***********************************************************
*@function: ty_rvc_rt_map_send_v2
*@brief: Send real-time structured map data to the app
*@param[in] map_info: map data, including fixed header data, pixel data,
the number of room zones, and boundary grid coordinate point data.
*@return OPRT_OK on success. Others on error, please refer to tuya_error_code.h
** *********************************************************/
OPERATE_RET ty_rvc_rt_map_send_v2(RVC_MAP_DATA_S* map_info)
Parameters
| Parameter | Description |
|---|---|
| map_info | The map data. For more information, see the RVC_MAP_DATA_S struct. |
For more information about the above request parameters, see Map and route data structure.
When you need to clear the map displayed on the app, call this interface to report an empty map. Regarding the format of an empty map, in the RVC_MAP_DATA_S struct:
- The
headermember is assigned0. - The
map_buffmember is assignedNULL. - The
room_polygons_datamember is assignedNULL. - The
room_polygons_countmember is assigned0.
Report real-time route data
Send structured data of real-time routes to the mobile app for display.
/***********************************************************
*@function: ty_rvc_rt_cleanpath_send
*@brief Send real-time cleanpath data to app
*@param[in] path_info: realtime path data which is need to be upload
*@return OPRT_OK on success. Others on error, please refer to tuya_error_code.h
***********************************************************/
OPERATE_RET ty_rvc_rt_cleanpath_send_v2(IN RVC_PATH_INFO_S* path_info);
Parameters
| Parameter | Description |
|---|---|
| path_info | For more information about real-time route data, see Map and route data structure. |
When you need to clear the route displayed on the app, call this interface to report an empty route. Regarding the format of the empty route, in the RVC_PATH_INFO_S struct, you can fill in 1 for type to indicate the standard mode and 0 for the rest.
Report thumbnail data
Send the AI thumbnail file data to the mobile app. You only need to pass the data to the TuyaOS SDK as required by the RVC_AI_OBJECT_THUMBNAILS_INFO_S struct. The TuyaOS SDK will internally transform the data before transmitting it to the mobile app.
/***********************************************************
*@function: ty_rvc_rt_ai_thumbnails_send
*@brief Send realtime ai thumbnails to app
*@param[in] object_info: ai object thumbnails param
*@return OPRT_OK on success. Others on error, please refer to tuya_error_code.h
***********************************************************/
OPERATE_RET ty_rvc_rt_ai_thumbnails_send(IN RVC_AI_OBJECT_THUMBNAILS_INFO_S* object_info);
Parameters
| Parameter | Description |
|---|---|
| object_info | The content of the thumbnail data. |
Register a callback to get original HD image file name
Register a callback to get the AI original HD image file name. Based on the file name sent by the mobile app, you notify the application through the sets_handler callback. The application retrieves the specified original HD image data according to the file name.
/**
* @brief The callback for AI HD image data. ai_name is the name of an AI HD image file sent by the mobile app.
*/
typedef INT_T (*RVC_AI_DATA_LOAD_CB)(CHAR_T *ai_name);
/***********************************************************
*@function: ty_rvc_ai_original_init
*@brief Callback function for get AI HD name
*@param[in] sets_handler: set unpload AI HD name cb
*@return OPERATE_RET: 0 for success, other error codes indicate failure
***********************************************************/
OPERATE_RET ty_rvc_ai_original_init(RVC_AI_DATA_LOAD_CB sets_handler);
Report original HD images
Send the original HD image data to the mobile app. Based on the file name sent by the mobile app, you notify the application through the sets_handler callback. The application retrieves the specified original HD image data according to the file name and passes it to the TuyaOS SDK. The TuyaOS SDK then sends it to the mobile app. You need to pass the data content, length, and format of the original HD image to the TuyaOS SDK. The TuyaOS SDK will transform the data before transmitting it to the mobile app.
/***********************************************************
*@Function: ty_rvc_ai_original_send
*@brief send ai original to app
*@param[in] file_type: ai original types include jpg, png, gif, svg, bmp, ico
*@param[in] file_buff: ai original buff
*@param[in] file_len: ai original len
*@return OPRT_OK on success. Others on error, please refer to tuya_error_code.h
***********************************************************/
OPERATE_RET ty_rvc_ai_original_send(IN CHAR_T* file_type, IN CHAR_T* file_buff, IN INT_T file_len);
Parameters
| Parameter | Description |
|---|---|
| file_type | The following six types of HD images are currently supported: JPG, PNG, GIF, SVG, BMP, and ICO. To support other image types, contact the Tuya project manager. |
| file_buff | The content of the specified original HD image data. |
| file_len | The length of the specified original HD image data. |
Map and route data structure
Map data
Map data RVC_MAP_DATA_S consists of the following categories:
-
The fixed header data of the map. It is composed of members of the
RVC_MAP_HEAD_INFO_Sstruct.No. Field Data type Description 1 map_id UINT16_T - The ID of a cleaning map. If the same map is just updated, the ID remains unchanged.
- If a map is lost or otherwise needs to be rebuilt, the ID is incremented.
- It is necessary to store the ID from before shutdown so that it can continue to be used after powering on and restarting.
2 status UINT32_T Used for UI interactions on app panels. 0x00: The map is in an unstable state. For example, the map is incomplete and is still being built.0x01: The map is in a stable state. The map is built and has a complete environment.
3 height UINT32_T The pixel height of a map. If there is no map, this parameter is 0.4 width UINT32_T The pixel width of a map. If there is no map, this parameter is 0.5 resolution UINT32_T The resolution of a map (the width and length of each grid), reported in original value, in centimeters. 6 origin UINT32_T The X/Y coordinates of the device origin, with reference to the screen coordinate system. The original values are reported. For more information, see Map coordinate system. 7 charge_point UINT32_T The X/Y coordinates of a charging station, with reference to the screen coordinate system. The original values are reported. If the X and Y coordinates of the charging station are both equal to 0, the charging station will not be displayed. For more information, see Map coordinate system.8 charge_angle UINT32_T The device’s heading angle at the current point. For more information, see Device angle. -
All pixel data in the map is represented by the
map_buffmember. For pixel values, refer to the definitions of theRVC_PIXEL_TYPE_Eenumeration values.
Based on the pixel width and height of the map, fill the specified pixel enumeration value at the top-left corner R(0,0) within its area using a two-dimensional scanning method.1: The current pixel is an obstacle.2: The current pixel is a carpet. -
The outer boundary information of the specified area in a map is represented by the
RVC_ROOM_POLYGON_Smember. It refers to the coordinates of the boundary points of the room partition.
As shown in the following figure: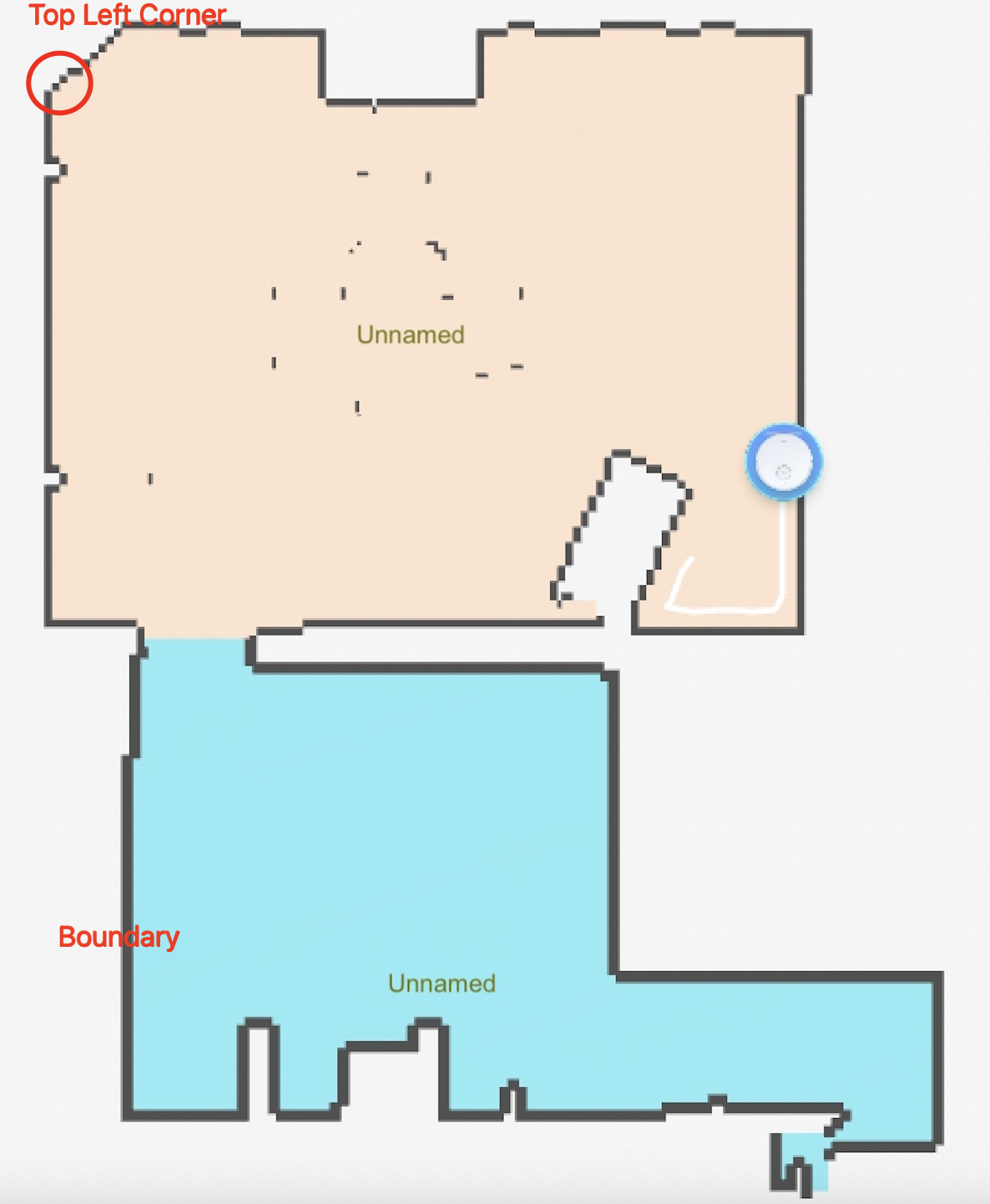
Each boundary grid coordinate point shall be filled into the memory space sequentially, starting from the top-left corner according to the screen coordinate system, and finally returning to the starting point. Avoid skipping or fitting any points in between, as this might cause errors on the panel.
-
Map reporting routine
int main_test(void) { RVC_MAP_DATA_S rvc_map_info = { 0 }; int i = 0; int j = 0; /* Assign values to the fixed bytes of the map protocol header */ rvc_map_info.header.map_id = 0; //The map ID rvc_map_info.header.status = 1; //0 indicates that the map is unstable, and 1 indicates that the map is stable rvc_map_info.header.width = 121; //Pixel width of the map rvc_map_info.header.height = 152; //Pixel height of the map rvc_map_info.header.origin.x = 564; //X coordinate of the device origin rvc_map_info.header.origin.y = 1357; //Y coordinate of the device origin rvc_map_info.header.resolution = 5; //Resolution rvc_map_info.header.charge_point.x = 0; //X coordinate of the charging station rvc_map_info.header.charge_point.y = 0; //Y coordinate of the charging station rvc_map_info.header.charge_angle = 0; //Angle of the charging station //Call functions to allocate memory rvc_map_info.map_buff = NULL; char strFileInfo_buff[]; //Your original pixel data to be filled in the following two-dimensional array //Request a two-dimensional array of memory for temp_map_buf for (i = 0; i < rvc_map_info.header.height; i++) { for (j = 0; j < rvc_map_info.header.width; j++) { rvc_map_info.map_buff[i][j] = strFileInfo_buff[rvc_map_info.header.width* i + j]; } } char map_buf_info[]; //Provide information of room outline coordinate points if (map_buf_info!= NULL) { // Check if the data is valid int room_count = 2; // Provide the number of room partitions RVC_ROOM_POLYGON_S *tmp_room_polygon = NULL; int tmp_points_size = 0; int offset_len = 0; //Data offset int all_points_size = 0; //The number of all coordinates for (i = 0; i < room_count; i++) { //Traverse the room outline information all_points_size += xxxx; //Provide the number of boundary point coordinates in all rooms } tmp_room_polygon = (RVC_ROOM_POLYGON_S*)Malloc(room_count * sizeof(RVC_ROOM_POLYGON_S) + all_points_size * sizeof(RVC_POINT_S)); //Request the memory space for the struct. Note that the polygon member in the struct is a pointer, and you need to assign a value to the pointer object. rvc_map_info.room_polygons_data = tmp_room_polygon; float tmp_origin_x = (float)map_header.origin.x /1.0f; //Get the coordinates of the origin float tmp_origin_y = (float)map_header.origin.y /1.0f; RVC_POINT_S* points_memory =(RVC_POINT_S*)(tmp_room_polygon + room_count); //Coordinate point data points to the secondary pointer for ( i = 0; i < room_count; i++) { //Traverse the room outline information tmp_room_polygon->id = (map_buf_info[4 + 8 * i ] << 24) | (map_buf_info[3 + 8 * i] << 16) | (map_buf_info[2 + 8 * i] << 8) | map_buf_info[1 + 8 * i]; tmp_room_polygon->polygon.points_size = (map_buf_info[8 + 8 * i] << 24) | (map_buf_info[7 + 8 * i] << 16) | (map_buf_info[6 + 8 * i] << 8) | map_buf_info[5 + 8 * i]; PR_DEBUG("room id :%d, points size :%d", tmp_room_polygon->id, tmp_room_polygon->polygon.points_size); offset_len = 1 + 8 * room_count + tmp_points_size; //Data offset tmp_room_polygon->polygon.points = points_memory; for (j = 0; j < tmp_room_polygon->polygon.points_size; j++) { //The coordinates are reported to the panel based on the screen coordinate system. You can adjust it according to your own map algorithm. memcpy(&tmp_room_polygon->polygon.points[j].x, map_buf_info.buff + (offset_len + j * 12), sizeof(RVC_POINT_S)); tmp_room_polygon->polygon.points[j].x = tmp_room_polygon->polygon.points[j].x * 100 / 5 + (tmp_origin_x); //Based on the resolution and origin coordinates of the world coordinate system, calculate the screen coordinate data and report it to the panel for display tmp_room_polygon->polygon.points[j].y = (tmp_origin_y) - (tmp_room_polygon->polygon.points[j].y * 100 / 5) ; tmp_room_polygon->polygon.points[j].z = tmp_room_polygon->polygon.points[j].z * 100 / 5; // PR_DEBUG("point[%d] x:%f,y:%f, z:%f", j, tmp_room_polygon->polygon.points[j].x, tmp_room_polygon->polygon.points[j].y,tmp_room_polygon->polygon.points[j].z); } tmp_points_size += (tmp_room_polygon->polygon.points_size * sizeof(RVC_POINT_S)); //Add the number of coordinate points in the room points_memory += tmp_room_polygon->polygon.points_size; //Address offset of secondary pointer tmp_room_polygon++; //Get the outline information of the next room } rvc_map_info.room_polygons_count = room_count; int ret = ty_rvc_rt_map_send_v2(&rvc_map_info); //Report map data if(rvc_map_info.room_polygons_data != NULL) { Free(rvc_map_info.room_polygons_data); } } //The requested memory must be released later return ret; }
Route data
For the format of route data, see the RVC_PATH_INFO_S struct.
| No. | Field | Data type | Description |
|---|---|---|---|
| 1 | path_id | UINT16_T | The route map ID of a complete cleaning. This field is reported incrementally at the beginning of each cleaning. |
| 2 | type | UINT8_T | The type of route. Valid values:
|
| 3 | direction | UINT16_T | The device’s heading angle. For more information, see Device angle. |
| 4 | count | UINT32_T | The total number of waypoints in a full route. |
| 5 | path_point | PATH_POINT_S | The array size of the route coordinates is count × 8, which can be given by referring to the Robot coordinate system. The reported value = (original value ÷ grid length) × 10. |
The coordinates member in the PATH_POINT_S struct is an array of route coordinates, that is, the X coordinate and the Y coordinate. For each point, [x, y] = 1 × 8 bytes.
The type member indicates the waypoint type.
0x01: a standard cleaning route, and the waypoint type is only0x00.0x02: a complex route.0x03: a navigation route.
The waypoint types:
0: Clean the rooms.1: Move between rooms.2: Return to the charging station.3: Mop the rooms (not yet supported).
Route reporting routine
/**
* @brief Converts the route data
* @param [out] path_info is converted to RVC_PATH_INFO_S and then output
*/
void __ty_path_data_unpack(RVC_PATH_INFO_S* path_info)
{
/*The route is based on the robot coordinate system. The output coordinate raw data is of the Float type. Generally, the raw data will be converted in the algorithm stage. The route coordinate transmission value = (route coordinate raw value ÷ 0.05) * 10
The algorithm is as follows:
path_point.x = htons(((int16_t)((path.poses[i].pose.position.x) / 0.05 * 10));
path_point.y = htons(((int16_t)((path.poses[i].pose.position.y) / 0.05 * 10);
Transfer path_point.x and path_point.y to the path_buf cache and give it to the application.
*/
char path_buf[1000] = {0}; //Route data obtained from the algorithm
path_info->path_id = 0; //Report incrementally at the beginning of each cleaning
path_info->path_type = 3; //Navigation route
path_info->direction = 88; //Device heading angle
path_info->point_count = 10; //Total number of waypoints is 10
path_info->path_points = Malloc(path_info->point_count * sizeof(PATH_POINT_S)); //Request the array of route coordinates
char* dest_data = Malloc(path_info->point_count *4);
if(dest_data == NULL){
PR_ERR("malloc failed");
return;
}
memset(dest_data, 0,path_info->point_count *4);
memcpy(dest_data, &path_buf[0], path_info->point_count *4); //Copy the original value of the route to memory
for(int i = 0; i < path_info->point_count;i++){
path_info->path_points[i].coordinates.x = ((dest_data[4*i] << 8) & 0xff00) | (dest_data[4*i+1] & 0xff); //Convert the device's 2-byte valid coordinate data to int type (x, y)
path_info->path_points[i].coordinates.y = (dest_data[4*i+2] << 8) | (dest_data[4*i+3]);
path_info->path_points[i].type = 0; //Fill in the cleaning waypoints according to the actual waypoint type
}
Free(dest_data);
}
/**
* @brief Example of reporting the route
* @param
*/
void test_main(void)
{
OPERATE_RET ret = OPRT_OK;
while (1) {
RVC_PATH_INFO_S path_data_proper = {0};
__ty_path_data_unpack(&path_data_proper);
ret = ty_rvc_rt_cleanpath_send_v2(&path_data_proper); //Report the route
if(path_data_proper.path_points != NULL) {
Free(path_data_proper.path_points);
}
sleep(5);
}
}
Map coordinate system
When the robot vacuum performs a new cleaning task, it starts from the initial position and builds a map while cleaning to form a cleaning map and cleaning route. As the map gradually expands and the route continuously accumulates, the process involves the world coordinate system, the robot coordinate system, and the screen coordinate system displayed on the mobile app. Their relationship is as follows:
World coordinate system
The world coordinate system refers to the actual physical coordinate system, that is, the plane coordinate system of the room. Each time the robot vacuum cleans, a certain point in the world coordinate system is used as the starting point. The position of this point in the world coordinate system remains unchanged during this cleaning process. The world coordinate system helps users reference and understand the robot coordinate system.
Robot coordinate system
The robot coordinate system is established with the starting point as the origin and referenced to the world coordinate system. During the cleaning process, the origin is used as a reference to get the coordinate values of the waypoints.
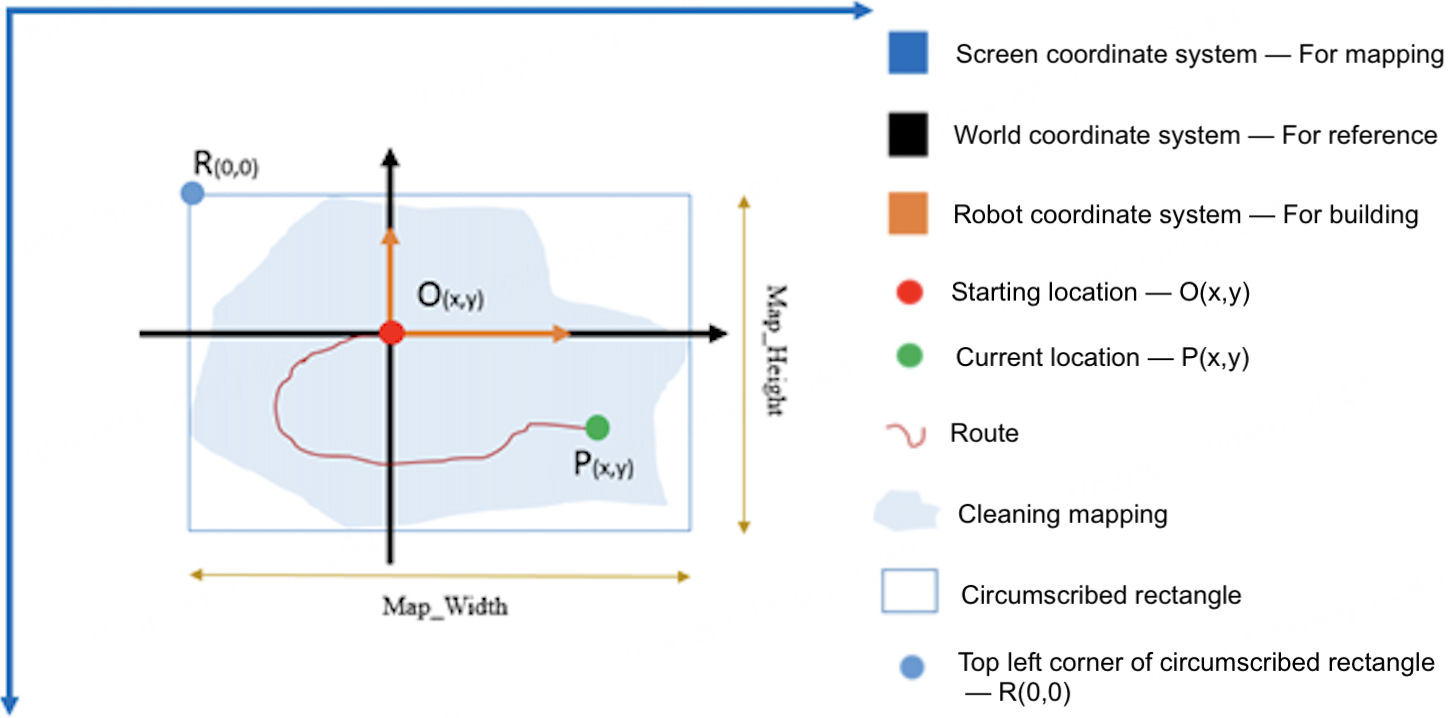
Screen coordinate system
The screen coordinate system is used for mapping on mobile apps, with the top left corner of the screen R(0,0) as the origin of this coordinate system.
Conversion between map coordinates
Map data
- The map formed after cleaning is an irregular polygon. For ease of processing, the circumscribed rectangle of the polygon is taken as the robot’s map. The map data is an array in the form of UINT8_T. The total number of map pixels is Map_width × Map_height. The first data point in the map array is UINT8_T0, which is the top left corner R(0,0).
- The robot origin is O(x,y), where x/y is the number of pixels relative to R. As cleaning progresses, the map width and height will change, so the position of the origin O in the map array will also change (the x/y values change).
During mapping on the mobile app, the origin O is fixed, that is, the initial position of the robot vacuum in the world coordinate system remains unchanged.
Route data
Route data is a collection of traversed location points, whose coordinates are INT32 values. The current location point is P(x,y), where x/y is the value of point P relative to point O.
The transmitted route coordinate value = (route coordinate original value ÷ grid length) × 10, in order to balance precision and efficiency. For example, if the grid length is 0.05 meters, the transmitted route coordinate value = (route coordinate original value ÷ 0.05) × 10.
Area data
The coordinate data of the cleaning area, no-go area frame, virtual wall line, and point and go are INT32 values. The coordinate point is M(x,y), where x/y is the value of point M relative to point O, based on the robot coordinate system.
Device angle
- The device direction (front collision orientation) takes the world coordinate as the origin, with the angle increasing counterclockwise.
- The angle range is 0° to 360° (
0x00to0x168). - 0° represents the X-axis direction of the world coordinate system.
Is this page helpful?
YesFeedbackIs this page helpful?
YesFeedback




