PTZ Control
Pan-tilt-zoom (PTZ) control enables a camera to pan from left to right, tilt up and down, and zoom in and out of a scene.
Features
| Feature | Description |
|---|---|
| Basic features |
|
| Advanced features |
|
| Extended features |
|
Development guide
Runtime environment
-
Development framework
The generic features provided by IPC Product Development Kit.
-
Components
app_user_ptzapp_sys_ptzapp_user_event
How to
Configure the PTZ capabilities with motor.config and call the initialization API.
Initialization process
TY_SYS_PTZ_PARAM_T ptz_params;
...
// Configure the PTZ capabilities as needed.
...
// Initialize PTZ.
ty_user_ptz_start();
Data structure
typedef struct {
int max_pan_step; // maximal pan step
int max_pan_angle; // maximal pan angle
int max_tilt_step; // maximal tilt step
int max_tilt_angle; // maximal tilt angle
int horizon_tilt_step; // horizontal tilt step
int pan_speed; // default pan speed
int tilt_speed; // default tilt speed
int tilt_track; // tilt track support flag
int sleep_pos_def; // sleep position support flag
int defalut_patrol_tmode; // default patrol type (non-/simple patrol)
int pan_reverse; // pan motor reverse flag
int tilt_reverse; // tilt motor reverse flag
char struct_type; // device structure type
TY_GET_OBJECT_COORDINATE_CB get_object_coordinate_cb; // determinate track source
char drv_path[DRV_PATH_NAME_LEN]; // path of PTZ driver
} TY_SYS_PTZ_PARAM_T;
API description
Initialize the PTZ module
/**
* @brief NONE
*
* @return OPERATE_RET
*/
OPERATE_RET ty_user_ptz_start(void);
The PTZ configuration is stored in motor.config, which does not require parameter passing through a function.
Initialize the PTZ system management module
/**
* @fn OPERATE_RET ty_sys_ptz_init(TY_SYS_PTZ_PARAM_T* params)
* @brief initialize PTZ component with user defined parameters.
* @param[in] params: user defined parameters' srtuct pointer.
* @param[out] None.
* @retval OPRT_OK: action succeed; OPRT_INVALID_PARM: invaild parameter.
* @attention None.
*/
OPERATE_RET ty_sys_ptz_init(IN CONST TY_SYS_PTZ_PARAM_T* params);
Get the current status of PTZ movement
/**
* @fn int ty_sys_ptz_get_check_state(void)
* @brief check if the device is in self-check
* @param[in] None
* @param[out] None
* @retval 0: is in self check; 1: not in self check.
* @attention None
*/
int ty_sys_ptz_get_check_state(void);
Get the current coordinates of the PTZ preset point
/**
* @fn OPERATE_RET ty_sys_ptz_linkpos_get(OUT INT_T *x, OUT INT_T *y)
* @brief get the current target position coordinates.
* @param[in] None.
* @param[out] x: target pan pos.
* @param[out] y: target tilt pos.
* @retval OPRT_OK: succeed; OPRT_COM_ERROR: PTZ component is uninitialized.
* @attention None.
*/
int ty_sys_ptz_linkpos_get(int *x, int *y);
Get the status of key control
/**
* @fn int ty_sys_ptz_get_key_status(void)
* @brief get keying task state.
* @param[in] None.
* @retval 0: not in keying; 1: in keying.
* @attention None.
*/
int ty_sys_ptz_get_key_status(void);
Stop the scheduling of PTZ threads
/**
* @fn void ty_sys_ptz_stop(void)
* @brief stop PTZ component.
* @param[in] None.
* @param[out] None.
* @retval None.
* @attention None.
*/
void ty_sys_ptz_stop(void);
Determine if the camera is moving
/**
* @fn OPERATE_RET ty_sys_ptz_get_motion_state(OUT UINT_T *is_move)
* @brief check if PTZ is moving(if md event is caused by PTZ moving).
* @param[in] None.
* @param[out] is_move to store result, 0: still(md event to upload); 1: in move(md event to ignore).
* @retval OPRT_OK: action succeed; OPRT_INVALID_PARM: invaild parameter.
* @attention None.
*/
OPERATE_RET ty_sys_ptz_get_motion_state(OUT UINT_T *is_move);
Get the current coordinates
/**
* @fn OPERATE_RET ty_sys_ptz_pos(int *pan, int *tilt)
* @brief get PTZ position
* @param[in] None.
* @param[out] pan: current pan step.
* @param[out] tilt: current tilt step.
* @retval OPRT_OK: action succeed; OPRT_INVALID_PARM: invaild parameter.
* @attention None.
*/
OPERATE_RET ty_sys_ptz_pos(int *pan, int *tilt);
Example
Here is an example of how to configure the montor.config file to implement a typical patrol feature.
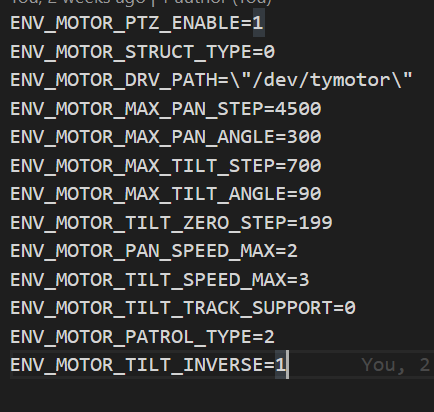
| Configuration item | Value | Description |
|---|---|---|
| ENV_MOTOR_PTZ_ENABLE | 0 or 1 |
Specify whether to enable the PTZ feature.
|
| ENV_MOTOR_STRUCT_TYPE | 0 or 1 |
The PTZ structure.
|
| ENV_MOTOR_DRV_PATH | String | The directory of the camera: /dev/tymotor by default. |
| ENV_MOTOR_MAX_PAN_STEP | Integer | The maximum step size of horizontal movement. |
| ENV_MOTOR_MAX_PAN_ANGLE | Integer | The maximum angle of horizontal movement. |
| ENV_MOTOR_MAX_TILT_STEP | Integer | The maximum step size of vertical movement. |
| ENV_MOTOR_MAX_TILT_ANGLE | Integer | The maximum angle of vertical movement. |
| ENV_MOTOR_TILT_ZERO_STEP | Integer | The step size of vertical movement when the tilt is 0 degrees. |
| ENV_MOTOR_PAN_SPEED_MAX | Integer | The maximum speed of horizontal movement. |
| ENV_MOTOR_TILT_SPEED_MAX | Integer | The maximum speed of vertical movement. |
| ENV_MOTOR_TILT_TRACK_SUPPORT | 0 or 1 |
Specify whether vertical tracking is supported. |
| ENV_MOTOR_PATROL_TYPE | 0 or 2 |
Patrol mode.
|
| ENV_MOTOR_TILT_INVERSE | 0 or 1 |
The direction of the vertical motor.
|
| ENV_MOTOR_PAN_INVERSE | 0 or 1 |
The direction of the horizontal motor.
|
| ENV_MOTOR_MOTOR_SUP_SLEEP_POS | 0 or 1 |
Support for physical mask (privacy mode)
|
Things to note
The PTZ component only provides business logic capabilities and does not include driver capabilities. Add the necessary driver resource if needed.
FAQs
Can the camera perform other operations during self-check?
No, it cannot.
Self-check has the highest priority and cannot be interrupted by other operations. The modules listed from highest to lowest priority:
- Self-check
- Panorama stitching
- Key control
- Preset points and site favorites
- Patrol
- Tracking
Will the camera still perform its scheduled patrol if it gets disconnected?
Yes, it will.
The camera receives the patrol schedule after the user creates it on the mobile app. Here is how the patrol schedule works:
- The cloud sends the created patrol schedule to the camera.
- The camera receives the patrol schedule and sets a timer accordingly.
- The PTZ module gets notified when the timer expires and performs a patrol.
Is this page helpful?
YesFeedbackIs this page helpful?
YesFeedback




